Si vous concevez, construisez ou fournissez Navigation et positionnement sous-marins, Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Positionnement sous-marin pour les UUV, AUV et ROV
La navigation, le positionnement et le suivi sous-marins des UUV (véhicules sous-marins sans pilote), AUV (véhicules sous-marins autonomes) et ROV (véhicules télécommandés) sont généralement effectués à l’aide de méthodes acoustiques ou basées sur le mouvement, car les ondes RF et autres ondes électromagnétiques ne se propagent pas sur des distances utiles sous l’eau. Cela signifie que, contrairement aux véhicules sans pilote dans d’autres domaines, les véhicules robotiques sous-marins ne peuvent pas compter sur des signaux GNSS continuellement mis à jour pour obtenir une position fixe.
Les systèmes de navigation et de positionnement acoustiques utilisent des nœuds de surface fixes dont la position GNSS est connue et une série de transpondeurs sous-marins qui peuvent être interrogés acoustiquement pour fournir des informations sur leur distance et leur angle par rapport au nœud de surface.
Ramses – Émetteur-récepteur de positionnement LBL haute précision par iXblue
Les deux types de systèmes de positionnement acoustique les plus courants sont les systèmes à longue base (LBL) et à base ultra-courte (USBL).
Positionnement à longue base – LBL
Les systèmes LBL utilisent un réseau de transpondeurs fixes placés sur le fond marin autour de la zone d’opération du véhicule. Ces transpondeurs doivent être calibrés par rapport à un nœud de surface afin de fixer leur position. La triangulation peut ensuite être utilisée pour localiser le véhicule au sein du réseau de transpondeurs.
Positionnement à base ultra-courte – USBL
Système de positionnement acoustique sous-marin Subsonus USBL d’Advanced Navigation
Les systèmes USBL utilisent un réseau de transducteurs généralement monté sous un navire de surface. Le temps de retour et le déphasage du signal acoustique sont utilisés pour déterminer la distance et la direction du transducteur, qui sont à leur tour utilisés pour fixer la position du véhicule par rapport au navire de surface.
Les systèmes USBL ne sont pas aussi précis que les systèmes LBL, mais ils sont plus flexibles et plus faciles à déployer car ils ne nécessitent pas l’installation d’un réseau calibré de nœuds sous-marins.
Logs de vitesse Doppler – Positionnement DVL
Enregistreur de vitesse Doppler sous-marin Syrinx de Sonardyne
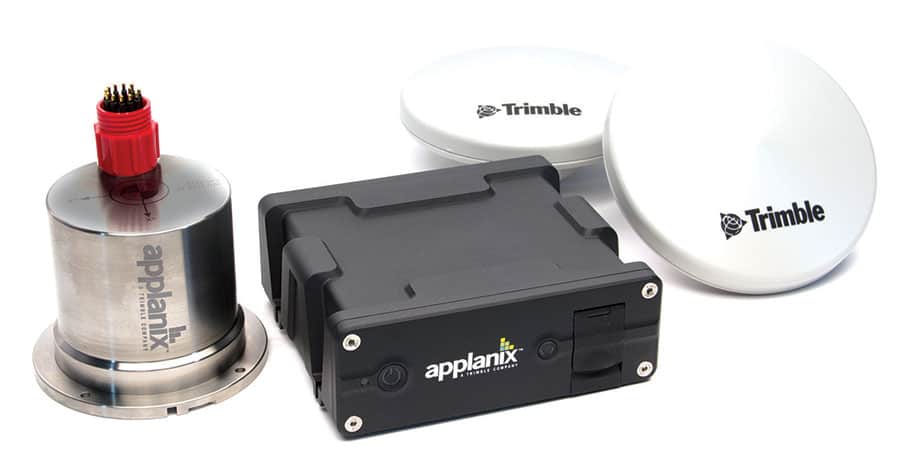
Au lieu de transpondeurs ou de transducteurs externes, les UUV peuvent également utiliser des Doppler Velocity Logs (DVL), qui sont des capteurs utilisant plusieurs faisceaux acoustiques pour estimer la vitesse par rapport au fond marin. Ces mesures de vitesse peuvent être intégrées pour fournir une estimation continue du changement de position. Les DVL sont utiles en tant que source d’estimation précise de la vitesse pour les INS (systèmes de navigation inertielle), et un INS assisté par DVL peut être utilisé comme aide à la navigation et au positionnement de haute précision pour la robotique sous-marine.
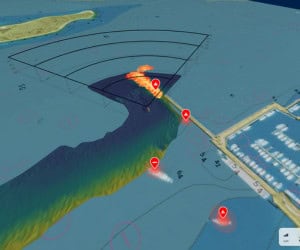
La nouvelle subvention accordée à FarSounder par la Rhode Island Commerce Corporation permettra d'accélérer le développement de ses cadres d'apprentissage automatique pour la classification automatisée des risques maritimes.