Si diseñas, construyes o suministras Navegación y posicionamiento submarinos, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
The Comprehensive Guide to Underwater Navigation & Subsea Positioning for ROV, UUV & AUV Systems
Resumen por
Sarah Simpson
Actualizado:
Posicionamiento submarino para UUV, AUV y ROV
La navegación, el posicionamiento y el seguimiento submarinos para UUV (vehículos submarinos no tripulados), AUV (vehículos submarinos autónomos) y ROV (vehículos operados a distancia) suelen realizarse mediante métodos acústicos o basados en el movimiento, ya que las ondas de radiofrecuencia y otras ondas electromagnéticas no se propagan a distancias útiles bajo el agua. Esto significa que, a diferencia de los vehículos no tripulados de otros ámbitos, los vehículos robóticos submarinos no pueden depender de señales GNSS actualizadas continuamente para obtener una posición fija.
Los sistemas acústicos de navegación y posicionamiento utilizan nodos fijos en la superficie con una posición GNSS conocida y una serie de transpondedores submarinos que pueden ser localizados acústicamente para proporcionar información sobre su distancia y ángulo con respecto al nodo de la superficie.
Ramses: transceptor de posicionamiento LBL de alta precisión de iXblue
Las dos formas más comunes de sistemas de posicionamiento acústico son Long Baseline (LBL) y Ultra-Short Baseline (USBL).
Long Baseline – Posicionamiento LBL
Los sistemas LBL utilizan una red de transpondedores fijos en el lecho marino que rodea la zona de operación del vehículo. Estos transpondedores deben calibrarse con referencia a un nodo de superficie para fijar su posición, y luego se puede utilizar la triangulación para localizar el vehículo dentro de la red de transpondedores.
Posicionamiento USBL (línea de base ultracorta)
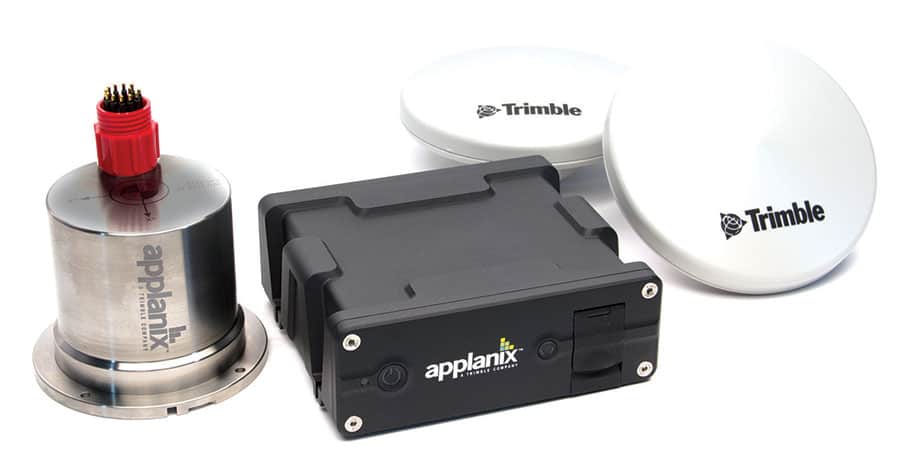
Sistema de posicionamiento acústico submarino Subsonus USBL de Advanced Navigation
Los sistemas USBL utilizan una matriz de transductores que normalmente se monta bajo una embarcación de superficie. El tiempo de retorno y el cambio de fase de la señal acústica se utilizan para determinar la distancia y la dirección del transductor, que a su vez se utilizan para fijar la posición del vehículo en relación con el buque de superficie.
Los sistemas USBL no son tan precisos como los sistemas LBL, pero son más flexibles y fáciles de implementar, ya que no requieren la instalación de una red calibrada de nodos submarinos.
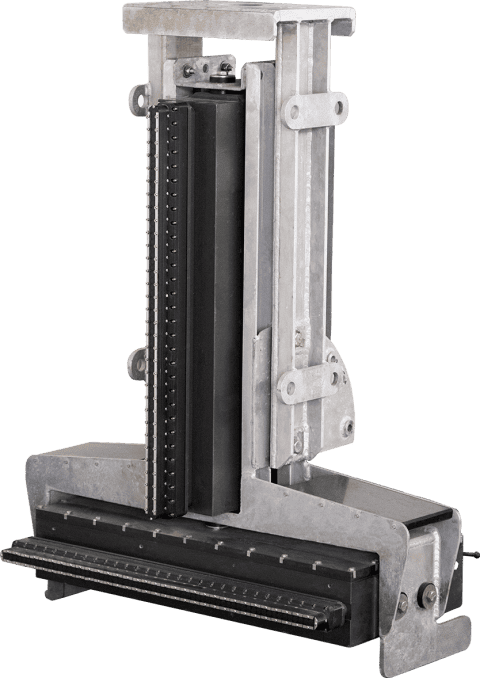
Registros de velocidad Doppler – Posicionamiento DVL
Registro de velocidad Doppler submarino Syrinx de Sonardyne
En lugar de transpondedores o transductores externos, los UUV también pueden utilizar registros de velocidad Doppler (DVL), que son sensores que utilizan múltiples haces acústicos para estimar la velocidad relativa al fondo marino. Estas lecturas de velocidad se pueden integrar para proporcionar una estimación continua del cambio de posición. Los DVL son útiles como fuente de estimación precisa de la velocidad para los INS (sistemas de navegación inercial), y un INS asistido por DVL puede utilizarse como ayuda de navegación y posicionamiento de alta precisión para la robótica submarina.
La nueva subvención de FarSounder de la Rhode Island Commerce Corporation acelerará el desarrollo de sus marcos de aprendizaje automático para la clasificación automatizada de peligros marítimos