Obstacle Detection and Collision Avoidance for Unmanned Vehicles
Collision avoidance is a foundational capability for modern unmanned systems, enabling vehicles such as drones, ground robots, and autonomous vessels to operate safely in complex, unpredictable environments. These systems detect and prevent potential collisions using an array of sensors and algorithms, forming a critical layer in robotic autonomy.
If you design, build or supply Collision & Obstacle Avoidance, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
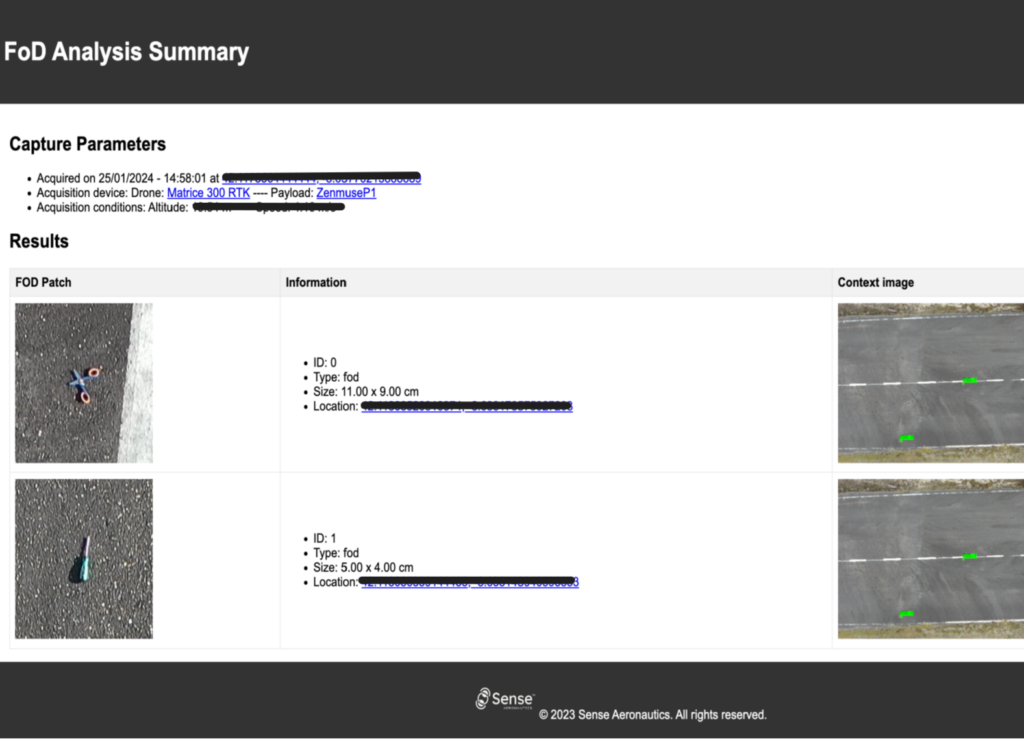
...olidate aerial detection and tracking data into structured, interactive summaries. For every tracked... ...nting relevant detection data in a clear, organized format. Reports can be exported as PDF files to...
Obstacle Detection and Collision Avoidance for Unmanned Vehicles
Overview by
Sarah Simpson
Updated:
Collision avoidance refers to the ability of an autonomous or remotely operated system to perceive obstacles in its environment and modify its trajectory to avoid them. It’s a broader concept than obstacle detection, which focuses on identifying potential hazards, as it also includes the decision-making and execution of maneuvers to prevent collisions.
In unmanned vehicles, including UAVs (unmanned aerial vehicles), UGVs (unmanned ground vehicles), USVs (unmanned surface vehicles), and other robotic platforms, collision avoidance is essential for enabling autonomous navigation, ensuring mission success, and protecting both assets and people.
These systems are fundamental in Beyond Visual Line of Sight (BVLOS) operations, where remote pilots cannot directly see the vehicle and must rely on onboard systems to navigate safely and effectively. Whether for aerial surveying, autonomous logistics, or battlefield reconnaissance, collision prevention is a non-negotiable requirement in unmanned technology.
Key Functions: Detection, Evaluation, and Maneuvering
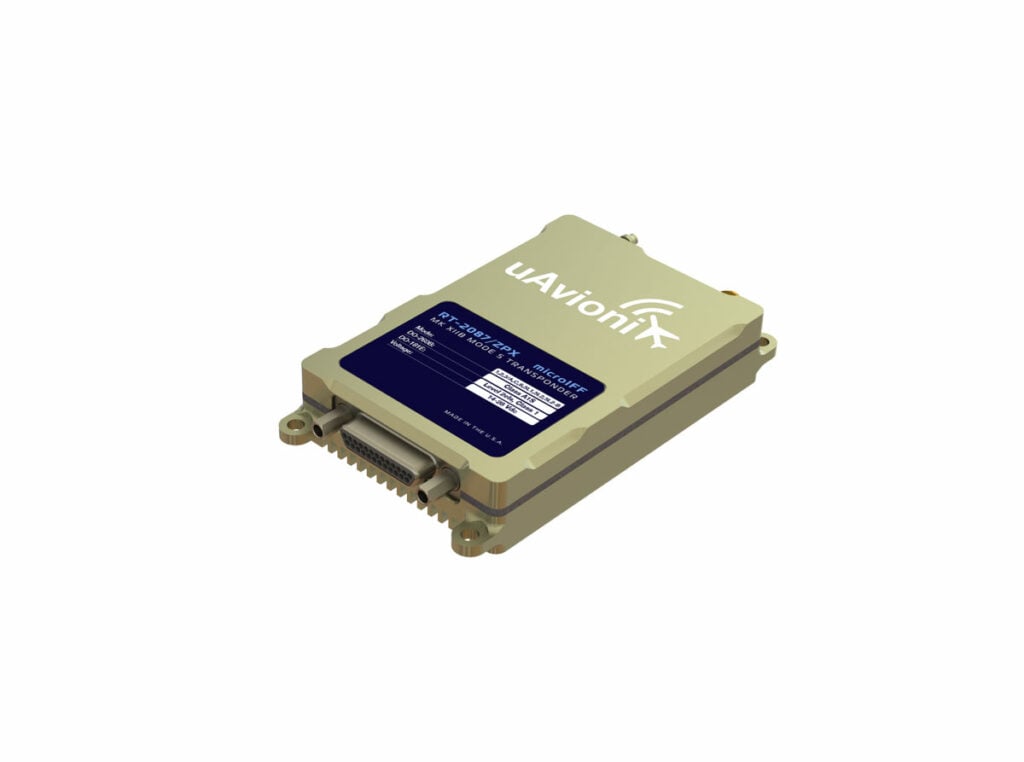
Collision avoidance for BVLOS UAS, Casia, from uAvionix.
Collision avoidance typically involves three core processes:
Obstacle detection: Sensors such as LiDAR, radar, ultrasonic sensors, and vision-based systems scan the environment to identify nearby objects or terrain.
Risk evaluation: The onboard computer uses computer vision algorithms or rule-based logic to assess the likelihood of a collision based on the object’s proximity and trajectory.
Avoidance maneuvering: Once a threat is detected, the system executes a real-time path change or speed adjustment to steer the vehicle clear of the obstacle.
These processes are managed by increasingly sophisticated onboard software that enables dynamic decision-making, even in cluttered or GPS-denied environments.
Types of Collision Avoidance Systems
The design of a collision avoidance system varies depending on the platform, use case, and environmental context. However, most systems fall into several broad categories based on how they sense and interpret their surroundings:
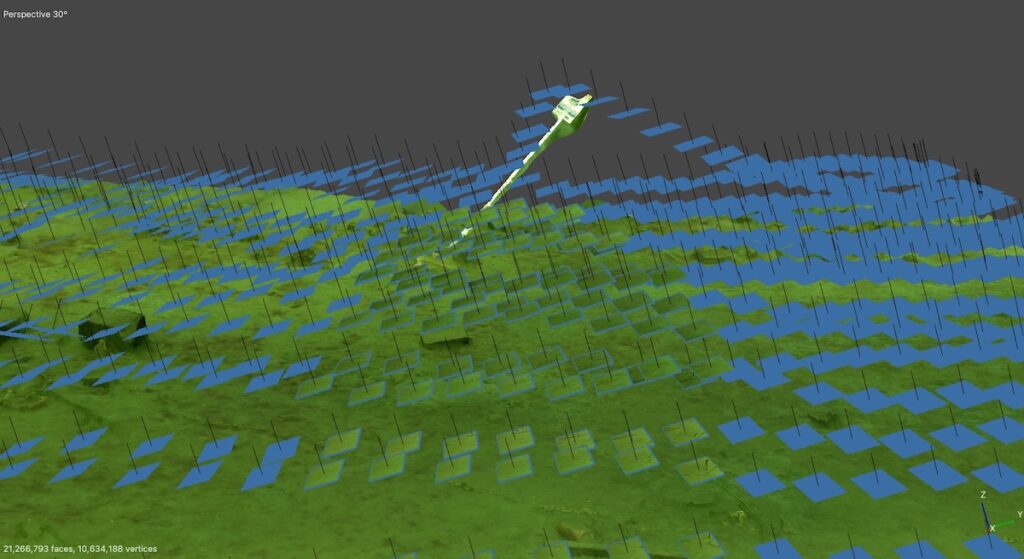
Collision avoidance solution from Sense Aeronautics.
Sensor-Based Systems
Sensor-driven designs are the backbone of most obstacle avoidance setups. They can include:
LiDAR: Offers high-resolution 3D environmental mapping and excels in outdoor and long-range scenarios. Commonly used in UAVs and autonomous ground vehicles.
Radar: Robust against fog, rain, and dust, making it suitable for both airborne and terrestrial platforms.
Ultrasonic sensors: Cost-effective and reliable for short-range detection, typically found in indoor UGVs or drones operating at low altitudes.
Infrared sensors: Useful in low-light or thermal contrast environments, often found in defense or night-time applications.
Vision-based sensors (cameras): Utilize monocular, stereo, or RGB-D cameras to generate depth maps and environmental imagery for obstacle identification.
Computer Vision Systems
Advanced collision avoidance systems use AI computer vision to interpret camera data, enabling them to classify and predict the movement of obstacles. These algorithms enable drones to “understand” scenes, distinguishing between static and dynamic objects such as pedestrians or vehicles.
Vision-based navigation also supports SLAM (Simultaneous Localization and Mapping), critical for navigating unknown environments. These systems are especially useful in UAVs flying in GPS-denied areas, urban canyons, or indoors.
Sensor Fusion Systems
To improve robustness, many modern systems integrate multiple sensors, combining LiDAR data with camera feeds or radar inputs. This sensor fusion approach enhances reliability and accuracy, especially in mission-critical or unpredictable scenarios. For example, a drone might use LiDAR for structural mapping and radar to maintain obstacle awareness in adverse weather conditions.
Components of a Collision Avoidance System
Designing a reliable collision avoidance system involves a complex integration of hardware and software elements. These components work together to ensure that unmanned systems can safely navigate dynamic and unpredictable environments.
Sensors
The “eyes and ears” of the vehicle, gathering raw environmental data via proximity detection, thermal imaging, or optical sensing:
Redundancy and fail-safe mechanisms are often built into critical applications to ensure continued function in the event of a component failure, enhancing the reliability of the collision avoidance system in mission-critical scenarios.
Collision Avoidance in Various Unmanned Platforms
While the core principles remain consistent, the implementation of collision avoidance varies significantly between platform types:
Aerial Systems (UAVs)
Drones and UAVs utilize a combination of vision systems, LiDAR, and radar to perform mid-air collision avoidance, which is particularly important in Beyond Visual Line of Sight (BVLOS) operations involving drone and obstacle avoidance. Obstacle avoidance drones are crucial for package delivery, infrastructure inspection, and agricultural spraying, as they frequently operate near people or structures.
Ground Systems (UGVs)
UGVs use proximity sensors and real-time mapping to navigate warehouses, factories, or uneven terrain. They must contend with static objects, such as pallets, as well as dynamic obstacles, like workers or vehicles. Safe navigation systems for UGVs prioritize low-latency obstacle detection and smooth path planning to ensure safe navigation.
Surface & Maritime Systems (USVs/UUVs)
Waterborne autonomous vessels often rely on radar, sonar, and COLREGs-based algorithms to safely navigate waterways. These systems evaluate the behavior of other vessels, following international collision avoidance rules while avoiding buoys, docks, and wildlife.
Applications of Collision Avoidance Technology
Commercial Use
Retail, logistics, and e-commerce firms use UAVs and UGVs with obstacle detection systems to automate delivery and internal logistics. Drones with collision avoidance reduce risk in urban environments, enabling last-mile delivery without endangering pedestrians or property.
Industrial Use
In warehouses and factories, collision prevention systems on autonomous mobile robots (AMRs) help optimize material handling and inventory movement. On construction sites, rugged UGVs with LiDAR obstacle avoidance safely maneuver through constantly changing landscapes.
Military Use
In defense, collision avoidance plays a pivotal role in both autonomous and semi-autonomous platforms. From ISR (intelligence, surveillance, reconnaissance) drones to unmanned ground vehicles, these systems allow units to operate independently in contested or GPS-denied environments. Vision-based navigation and DAA systems help maintain mission integrity even under electronic warfare conditions.
Relationship with Detect-and-Avoid Systems
While closely related, detect-and-avoid (DAA) systems are specifically designed to meet regulatory and operational requirements for unmanned aircraft flying in shared airspace, especially during BVLOS operations. DAA systems incorporate longer-range detection and often include coordination with other air traffic management systems.
Collision avoidance systems, by contrast, are designed for short- to medium-range obstacle evasion and are used across all unmanned domains.
Collision Avoidance Evolved
Collision avoidance empowers drones, robots, and autonomous vessels to operate with greater safety, precision, and independence. By integrating a diverse range of sensors, from LiDAR and radar to vision systems, and combining them with advanced software and AI, today’s unmanned platforms can reliably detect and navigate around obstacles.
As unmanned systems continue to evolve, so too will the sophistication of their collision mitigation systems, moving toward full autonomy in dynamic environments. Whether supporting autonomous drone delivery, warehouse logistics, or defense surveillance, collision avoidance will remain central to the growth and safety of unmanned operations.
Boxfish Robotics is advancing autonomous underwater vehicle operations by integrating DVL sensing and stereo camera perception to navigate complex environments while maintaining strict route consistency required for high-quality survey data
Indra validated a new collision detection and avoidance system through flight testing, confirming reliable target detection, sensor fusion, and safe maneuvering for unmanned aircraft operating in complex, shared airspace environments
Aerobits explores the operating principles of U-Space, showing how its SWaP-friendly technologies support Remote ID, ADS-B, and FLARM for drones, while enabling airspace monitoring, situational awareness, and integration with ground infrastructure
FarSounder integrates SEA.AI’s optical and thermal detections into SonaSoft LT, unifying surface and subsurface awareness by displaying AI classified objects alongside Argos 3D Forward Looking Sonar data
Canadian UAVs has introduced new lease and rental programs to make its Sparrowhawk Detect-and-Avoid (DAA) radar more accessible, using computer vision and ADS-B to enhance situational awareness for safe BVLOS operations
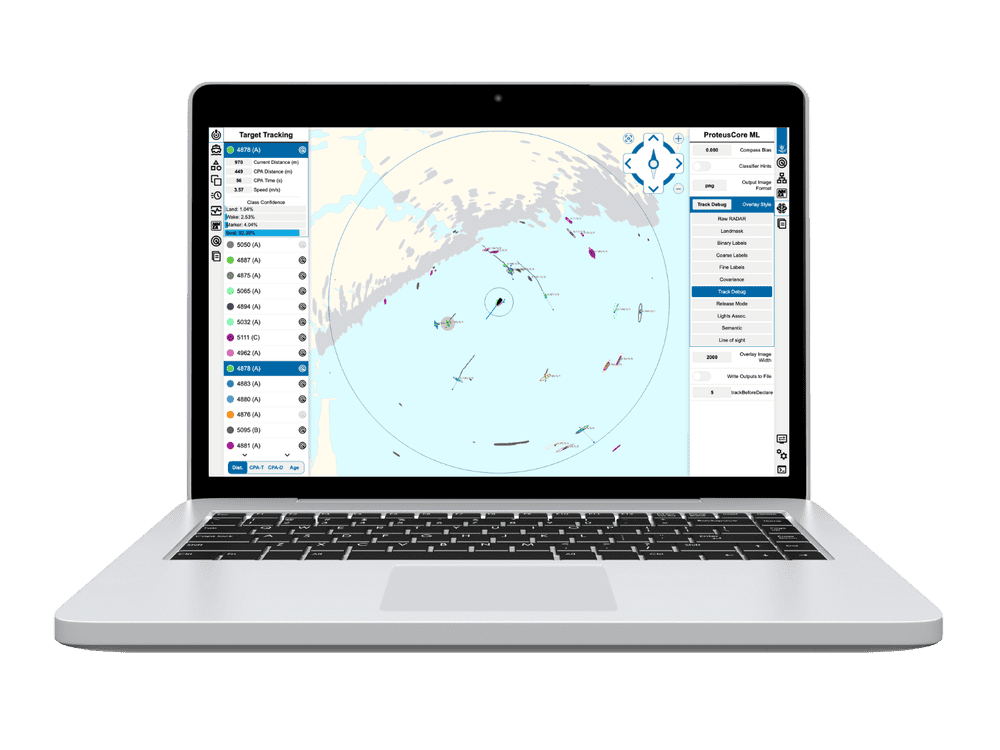
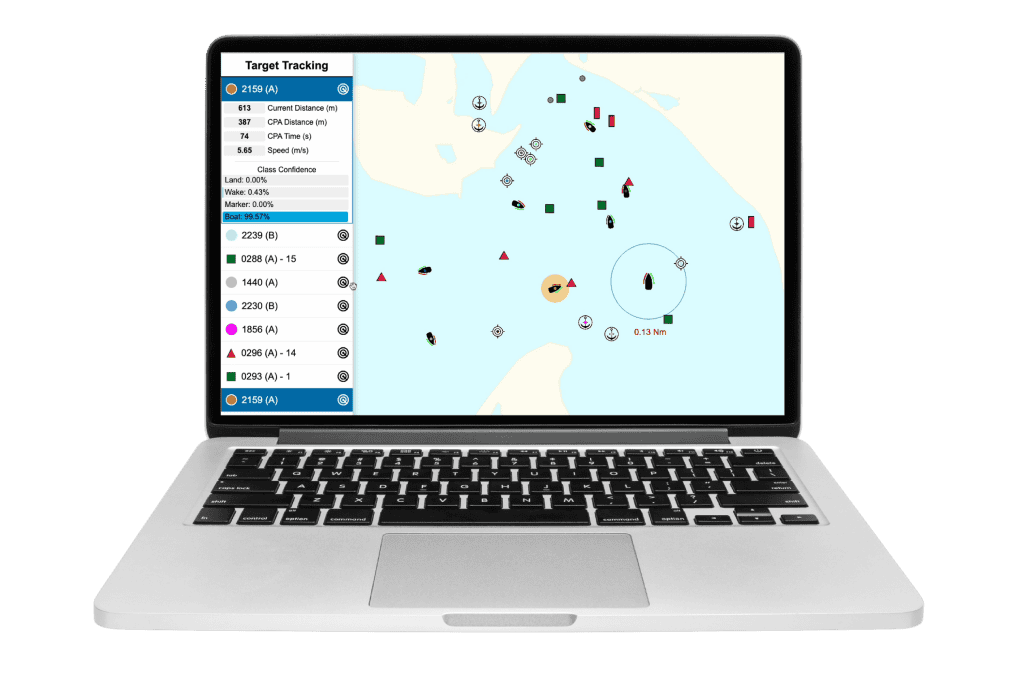
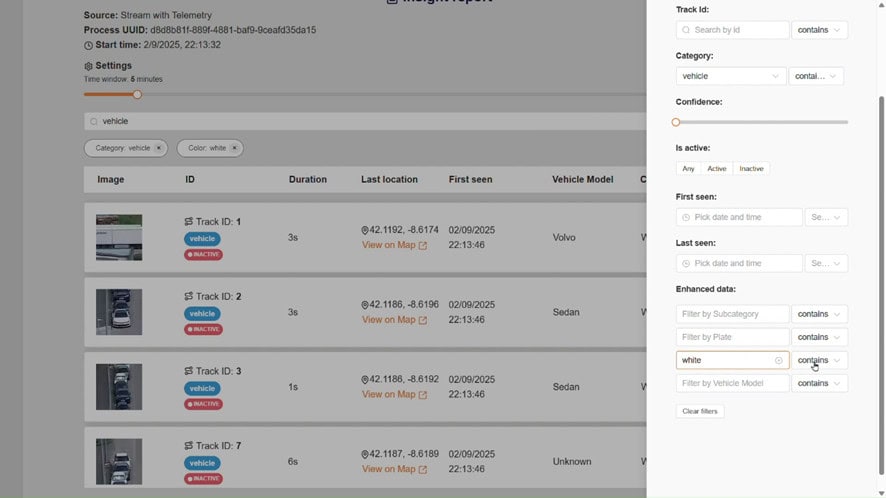
Sense Aeronautics’ upgraded ATR system delivers richer context, customizable alerts, and post-mission insight reports, transforming aerial video into actionable intelligence for efficient surveillance and analysis
ModalAI’s autopilots, drone platforms, and open VOXL SDK enable users from a broad range of industries to benefit from aerial- and ground-based autonomy technologies
Tocaro Blue's solutions utilize AI and machine learning to transform existing off-the-shelf marine radar systems into powerful perception sensors
Jul 22, 2025
Advancing Unmanned Systems Through Strategic CollaborationUST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.