Tocaro Blue’s ProteusCore software enables engineers and integrators to extract structured perception data from standard marine Radar sensors.
Applicable across autonomous, commercial, and recreational platforms, the system uses machine learning to automatically detect, classify, and track marine targets, reducing the need for manual range or gain adjustment and operator oversight.

ProteusCore Software
Transforming Radar Data into Perception Intelligence
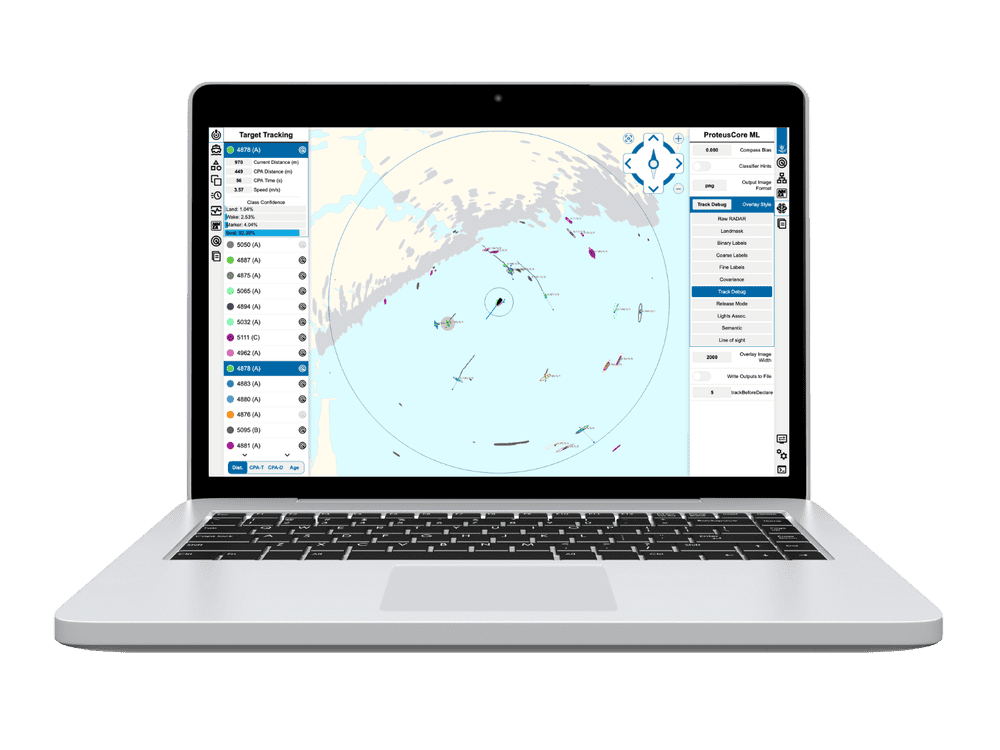
ProteusCore connects directly to existing Radar hardware and converts raw scanline data into trackable objects accessible via software interface. Proprietary machine learning models, trained on millions of Radar samples, separate vessels, land features, and environmental noise in real time. This capability supports collision avoidance, domain awareness, and user interface development for both crewed and uncrewed marine systems.
Modular Architecture for Continuous Adaptation
The ProteusCore architecture comprises three core modules, Autofocus, Machine Learning Object Detection, and Fusion & Tracking, that collectively optimize detection and tracking under changing maritime conditions.
- Autofocus evaluates incoming Radar returns and continuously adjusts range and gain to maintain clear imaging without user intervention, balancing short- and long-range visibility even during dynamic maneuvers.
- Machine Learning Object Detection interprets focused Radar imagery to identify and classify returns such as vessels, markers, and landmasses using models designed for the resolution and behavior of marine Radar data.
- Fusion & Tracking manages hundreds of simultaneous tracks, refining positional estimates, projecting motion trajectories, and merging information from sources such as AIS, LiDAR, cameras, or electronic charts to enhance confidence and classification reliability.
Integration with Existing and Emerging Platforms
ProteusCore operates efficiently on CPU-only computing platforms, enabling deployment on lightweight embedded hardware without GPU acceleration. The software supports leading solid-state Radar models including Garmin Fantom, Simrad Halo, Furuno DRS NXT, and Raymarine Cyclone. Output data is provided in JSON via WebSocket or UDP multicast, simplifying integration into autonomous control systems, multifunction displays, or data fusion networks.
Developers can deploy ProteusCore as a compiled executable for immediate APl access.
Evaluation and Development Workflow
System evaluation begins with the ProteusCore Devkit, a marine-grade hardware device that runs the complete ProteusCore software and provides plug-and-play access to the API. The Devkit enables sea trialing and functional validation within an existing perception or control stack before full integration.
The Devkit is used as a development and testing tool rather than a finished product. In academic or research environments, it may serve as a standalone platform for continued study and experimentation. After evaluation, integrators typically progress to a compiled executable for deployment, enabling advanced configuration and enterprise-scale implementation.
Supporting Advanced Marine Autonomy
By automating Radar tuning and applying machine learning to raw Radar data, Tocaro Blue’s ProteusCore provides a bridge between traditional navigation systems and perception-based autonomy. Its modular framework supports rapid development, scalable integration, and consistent situational awareness across uncrewed surface vessels, professional workboats, and recreational craft.