Rilevamento degli ostacoli ed evitamento delle collisioni per veicoli senza pilota
La prevenzione delle collisioni è una funzionalità fondamentale per i moderni sistemi senza pilota, che consente a veicoli come droni, robot terrestri e imbarcazioni autonome di operare in sicurezza in ambienti complessi e imprevedibili. Questi sistemi rilevano e prevengono potenziali collisioni utilizzando una serie di sensori e algoritmi, formando un livello critico nell'autonomia robotica.
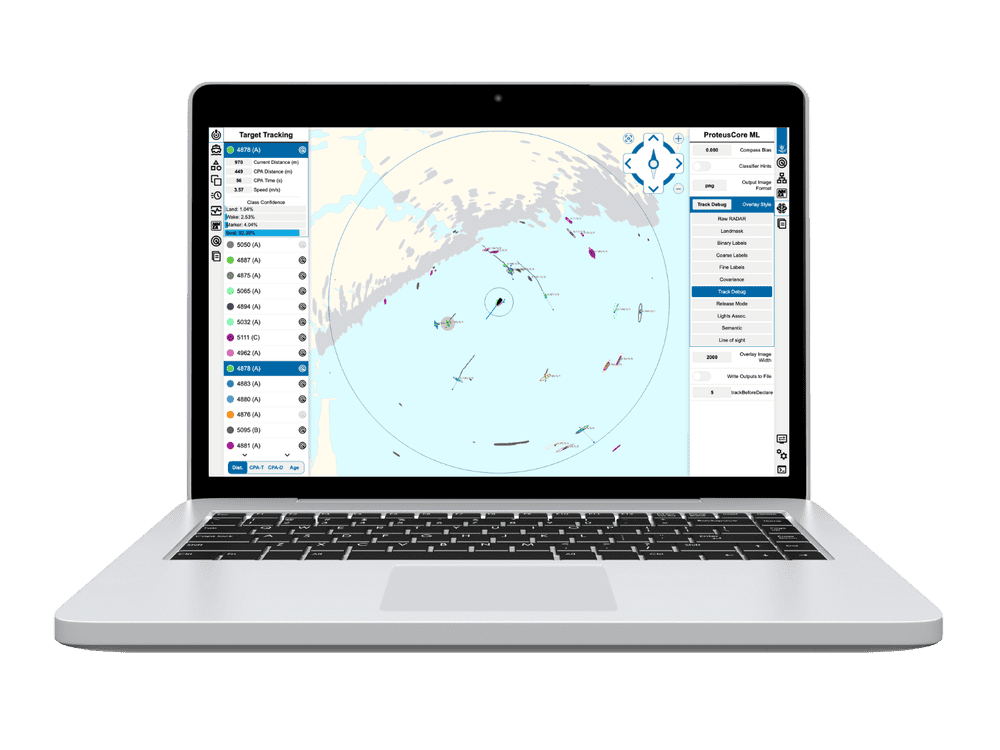
Soluzioni intelligenti per l'elaborazione dei radar marini: percezione avanzata e consapevolezza situazionale per imbarcazioni senza equipaggio e autonome
Se progettate, costruite o fornite Prevenzione delle collisioni e degli ostacoli, Crea un profilo per mettere in evidenza le tue competenze ed entrare in contatto con i visitatori che hanno un bisogno concreto delle tue soluzioni.
Rilevamento degli ostacoli ed evitamento delle collisioni per veicoli senza pilota
Panoramica da
Sarah Simpson
Aggiornato:
La prevenzione delle collisioni si riferisce alla capacità di un sistema autonomo o telecomandato di rilevare gli ostacoli presenti nell’ambiente circostante e di modificare la propria traiettoria per evitarli. Si tratta di un concetto più ampio rispetto al rilevamento degli ostacoli, che si concentra sull’identificazione dei potenziali pericoli, poiché include anche il processo decisionale e l’esecuzione di manovre volte a prevenire le collisioni.
Nei veicoli senza pilota, inclusi gli UAV (veicoli aerei senza pilota), gli UGV (veicoli terrestri senza pilota), gli USV (veicoli di superficie senza pilota) e altre piattaforme robotiche, l’evitamento delle collisioni è essenziale per consentire la navigazione autonoma, garantire il successo della missione e proteggere sia i beni che le persone.
Questi sistemi sono fondamentali nelle operazioni Beyond Visual Line of Sight (BVLOS), in cui i piloti remoti non possono vedere direttamente il veicolo e devono affidarsi ai sistemi di bordo per navigare in modo sicuro ed efficace. Sia per il rilievo aereo, logistica autonoma o ricognizione sul campo di battaglia, la prevenzione delle collisioni è un requisito imprescindibile nella tecnologia senza pilota.
Funzioni chiave: rilevamento, valutazione e manovra
Sistema anticollisione per UAS BVLOS, Casia, di uAvionix.
La prevenzione delle collisioni comporta in genere tre processi fondamentali:
Rilevamento degli ostacoli: sensori quali LiDAR, radar, sensori a ultrasuoni e sistemi basati sulla visione scansionano l’ambiente per identificare oggetti o terreni nelle vicinanze.
Valutazione del rischio: il computer di bordo utilizza algoritmi di visione artificiale o logica basata su regole per valutare la probabilità di una collisione in base alla vicinanza e alla traiettoria dell’oggetto.
Manovra di prevenzione: una volta rilevata una minaccia, il sistema esegue una modifica del percorso o una regolazione della velocità in tempo reale per allontanare il veicolo dall’ostacolo.
Questi processi sono gestiti da un software di bordo sempre più sofisticato che consente un processo decisionale dinamico, anche in ambienti affollati o privi di segnale GPS.
Tipi di sistemi anticollisione
La progettazione di un sistema anticollisione varia a seconda della piattaforma, del caso d’uso e del contesto ambientale. Tuttavia, la maggior parte dei sistemi rientra in diverse categorie generali in base al modo in cui rilevano e interpretano l’ambiente circostante:
Soluzione anticollisione di Sense Aeronautics.
Sistemi basati su sensori
I progetti basati su sensori costituiscono la spina dorsale della maggior parte dei sistemi di prevenzione degli ostacoli. Possono includere:
LiDAR: offre una mappatura ambientale 3D ad alta risoluzione ed eccelle in scenari esterni e a lungo raggio. Comunemente utilizzato negli UAV e nei veicoli terrestri autonomi.
Radar: resistente a nebbia, pioggia e polvere, è adatto sia per piattaforme aeree che terrestri.
Sensori a ultrasuoni: economici e affidabili per il rilevamento a corto raggio, tipicamente presenti negli UGV interni o nei droni che operano a bassa quota.
Sensori a infrarossi: utili in ambienti con scarsa illuminazione o contrasto termico, spesso presenti in applicazioni di difesa o notturne.
Sensori basati sulla visione (telecamere): utilizzano telecamere monoculari, stereo o RGB-D per generare mappe di profondità e immagini ambientali per l’identificazione degli ostacoli.
Sistemi di visione artificiale
I sistemi avanzati di prevenzione delle collisioni utilizzano la visione artificiale basata sull’intelligenza artificiale per interpretare i dati delle telecamere, consentendo loro di classificare e prevedere il movimento degli ostacoli. Questi algoritmi consentono ai droni di “comprendere” le scene, distinguendo tra oggetti statici e dinamici come pedoni o veicoli.
La navigazione basata sulla visione supporta anche lo SLAM (Simultaneous Localization and Mapping), fondamentale per la navigazione in ambienti sconosciuti. Questi sistemi sono particolarmente utili negli UAV che volano in aree prive di GPS, canyon urbani o interni.
Sistemi di fusione dei sensori
Per migliorare la robustezza, molti sistemi moderni integrano più sensori, combinando i dati LiDAR con le immagini delle telecamere o gli input dei radar. Questo approccio di fusione dei sensori migliora l’affidabilità e la precisione, soprattutto in scenari critici o imprevedibili. Ad esempio, un drone potrebbe utilizzare il LiDAR per la mappatura strutturale e il radar per mantenere la consapevolezza degli ostacoli in condizioni meteorologiche avverse.
Componenti di un sistema anticollisione
La progettazione di un sistema anticollisione affidabile comporta una complessa integrazione di elementi hardware e software. Questi componenti lavorano insieme per garantire che i sistemi senza pilota possano navigare in sicurezza in ambienti dinamici e imprevedibili.
Sensori
Gli “occhi e le orecchie” del veicolo, che raccolgono dati ambientali grezzi tramite rilevamento di prossimità, imaging termico o rilevamento ottico:
Il livello di intelligenza che interpreta i dati e determina le strategie di navigazione utilizzando metodi basati su regole o guidati dall’intelligenza artificiale:
Algoritmi di rilevamento e tracciamento degli oggetti
Logica di pianificazione del percorso e regolazione della traiettoria
Modelli di visione artificiale basati sull’intelligenza artificiale
Mappatura ambientale e algoritmi SLAM
Interfaccia di controllo
Traduce i risultati del software in movimenti fisici o modifiche operative nel veicolo:
I meccanismi di ridondanza e di sicurezza sono spesso integrati nelle applicazioni critiche per garantire il funzionamento continuo in caso di guasto di un componente, migliorando l’affidabilità del sistema anticollisione in scenari mission-critical.
Anticollisione in varie piattaforme senza pilota
Sebbene i principi fondamentali rimangano gli stessi, l’implementazione dell’anticollisione varia in modo significativo a seconda del tipo di piattaforma:
Sistemi aerei (UAV)
I droni e gli UAV utilizzano una combinazione di sistemi di visione, LiDAR e radar per evitare collisioni in volo, cosa particolarmente importante nelle operazioni Beyond Visual Line of Sight (BVLOS) che coinvolgono droni e la prevenzione degli ostacoli. I droni per l’evitamento degli ostacoli sono fondamentali per la consegna di pacchi, l’ispezione delle infrastrutture e l’irrorazione agricola, poiché operano spesso in prossimità di persone o strutture.
Sistemi terrestri (UGV)
Gli UGV utilizzano sensori di prossimità e mappatura in tempo reale per navigare in magazzini, fabbriche o terreni irregolari. Devono fare i conti con oggetti statici, come i pallet, e ostacoli dinamici, come lavoratori o veicoli. I sistemi di navigazione sicuri per gli UGV danno la priorità al rilevamento degli ostacoli a bassa latenza e alla pianificazione fluida del percorso per garantire una navigazione sicura.
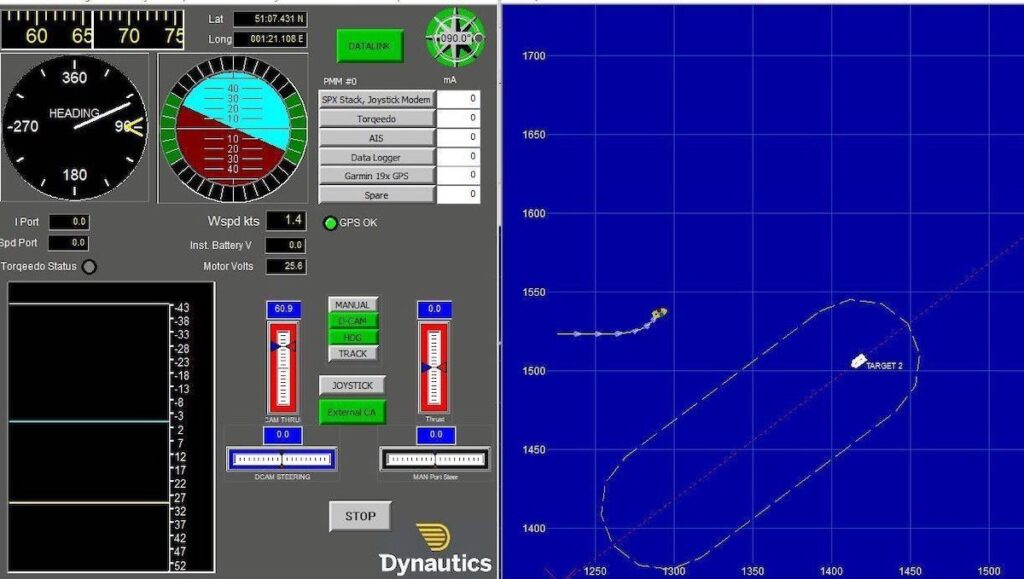
Sistemi di superficie e marittimi (USV/UUV)
Le imbarcazioni autonome spesso si affidano a radar, sonar e algoritmi basati sulle regole COLREG per navigare in sicurezza sulle vie navigabili. Questi sistemi valutano il comportamento delle altre imbarcazioni, seguendo le norme internazionali anticolisione ed evitando boe, banchine e fauna selvatica.
Applicazioni della tecnologia anticollisione
Uso commerciale
Le aziende di vendita al dettaglio, logistica ed e-commerce utilizzano UAV e UGV con sistemi di rilevamento degli ostacoli per automatizzare le consegne e la logistica interna. I droni con sistema anticollisione riducono i rischi negli ambienti urbani, consentendo la consegna dell’ultimo miglio senza mettere in pericolo pedoni o proprietà.
Uso industriale
Nei magazzini e nelle fabbriche, i sistemi di prevenzione delle collisioni sui robot mobili autonomi (AMR) contribuiscono a ottimizzare la movimentazione dei materiali e lo spostamento delle scorte. Nei cantieri edili, robusti UGV con sistema di prevenzione degli ostacoli LiDAR manovrano in sicurezza attraverso paesaggi in costante cambiamento.
Uso militare
Nel settore della difesa, la prevenzione delle collisioni svolge un ruolo fondamentale sia nelle piattaforme autonome che in quelle semi-autonome. Dai droni ISR (intelligence, sorveglianza, ricognizione) ai veicoli terrestri senza pilota, questi sistemi consentono alle unità di operare in modo indipendente in ambienti contesi o privi di GPS. La navigazione basata sulla visione e i sistemi DAA aiutano a mantenere l’integrità della missione anche in condizioni di guerra elettronica.
Relazione con i sistemi di rilevamento ed evitamento
Sebbene strettamente correlati, sistemi di rilevamento ed evitamento (DAA) sono progettati specificamente per soddisfare i requisiti normativi e operativi per gli aeromobili senza pilota che volano in spazi aerei condivisi, in particolare durante le operazioni BVLOS. I sistemi DAA incorporano un rilevamento a più lungo raggio e spesso includono il coordinamento con altri sistemi di gestione del traffico aereo.
I sistemi anticollisione, al contrario, sono progettati per l’evitamento di ostacoli a breve e medio raggio e sono utilizzati in tutti i settori senza pilota.
Evoluzione dell’evitamento delle collisioni
L’evitamento delle collisioni consente a droni, robot e imbarcazioni autonome di operare con maggiore sicurezza, precisione e indipendenza. Integrando una vasta gamma di sensori, dal LiDAR e dal radar ai sistemi di visione, e combinandoli con software avanzati e intelligenza artificiale, le piattaforme senza pilota odierne sono in grado di rilevare e aggirare gli ostacoli in modo affidabile.
Con la continua evoluzione dei sistemi senza pilota, anche i loro sistemi di mitigazione delle collisioni diventeranno sempre più sofisticati, muovendosi verso la piena autonomia in ambienti dinamici. Che si tratti di supportare la consegna autonoma con droni, la logistica di magazzino o la sorveglianza della difesa, la prevenzione delle collisioni rimarrà fondamentale per la crescita e la sicurezza delle operazioni senza pilota.