Detecção de obstáculos e prevenção de colisões para veículos não tripulados
A prevenção de colisões é uma capacidade fundamental para os sistemas não tripulados modernos, permitindo que veículos como drones, robôs terrestres e embarcações autónomas operem com segurança em ambientes complexos e imprevisíveis. Estes sistemas detetam e evitam colisões potenciais usando uma série de sensores e algoritmos, formando uma camada crítica na autonomia robótica.
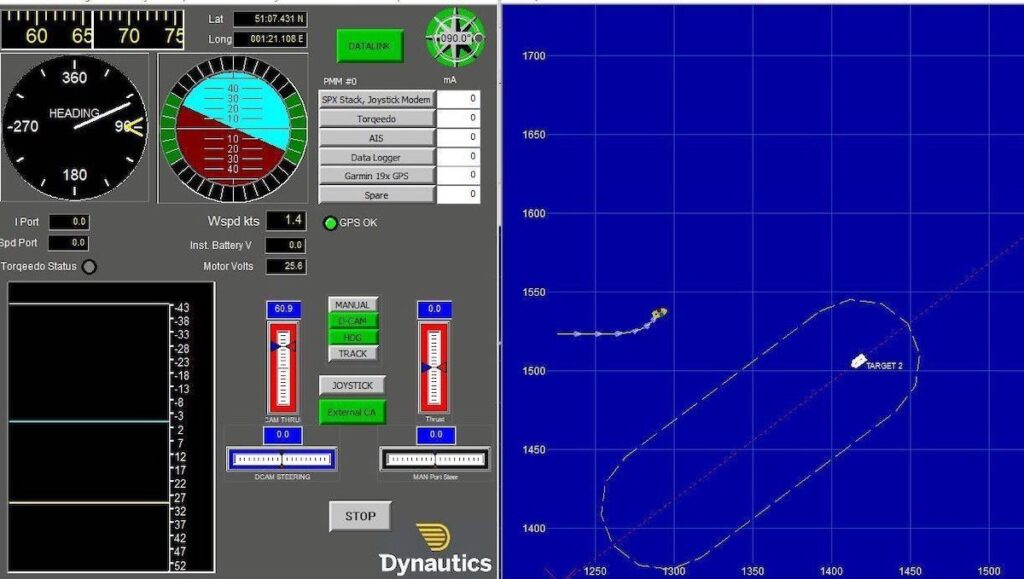
Pilotos automáticos marítimos, comunicações para veículos de superfície não tripulados, módulos de gestão de energia e simuladores marítimos e software
Se você projeta, constrói ou fornece Prevenção de colisões e obstáculos, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Detecção de obstáculos e prevenção de colisões para veículos não tripulados
Visão geral por
Sarah Simpson
Atualizado:
A prevenção de colisões refere-se à capacidade de um sistema autónomo ou operado remotamente de perceber obstáculos no seu ambiente e modificar a sua trajetória para os evitar. É um conceito mais amplo do que a deteção de obstáculos, que se concentra na identificação de potenciais perigos, uma vez que também inclui a tomada de decisões e a execução de manobras para evitar colisões.
Em veículos não tripulados, incluindo UAVs (veículos aéreos não tripulados), UGVs (veículos terrestres não tripulados), USVs (veículos de superfície não tripulados) e outras plataformas robóticas, a prevenção de colisões é essencial para permitir a navegação autónoma, garantir o sucesso da missão e proteger tanto os bens como as pessoas.
Esses sistemas são fundamentais em operações além da linha de visão (BVLOS), nas quais os pilotos remotos não podem ver diretamente o veículo e precisam confiar nos sistemas de bordo para navegar com segurança e eficácia. Seja para levantamentos aéreos, logística autónoma ou reconhecimento de campo de batalha, a prevenção de colisões é um requisito inegociável na tecnologia não tripulada.
Funções principais: deteção, avaliação e manobra
Prevenção de colisões para BVLOS UAS, Casia, da uAvionix.
A prevenção de colisões envolve normalmente três processos principais:
Detecção de obstáculos: Sensores como LiDAR, radar, sensores ultrassónicos e sistemas baseados em visão examinam o ambiente para identificar objetos ou terrenos próximos.
Avaliação de risco: O computador de bordo usa algoritmos de visão computacional ou lógica baseada em regras para avaliar a probabilidade de uma colisão com base na proximidade e na trajetória do objeto.
Manobra de prevenção: Assim que uma ameaça é detectada, o sistema executa uma mudança de trajetória ou um ajuste de velocidade em tempo real para desviar o veículo do obstáculo.
Esses processos são gerenciados por um software de bordo cada vez mais sofisticado que permite a tomada de decisões dinâmicas, mesmo em ambientes confusos ou sem GPS.
Tipos de sistemas de prevenção de colisões
O design de um sistema de prevenção de colisões varia dependendo da plataforma, do caso de uso e do contexto ambiental. No entanto, a maioria dos sistemas se enquadra em várias categorias amplas com base em como eles detectam e interpretam o ambiente ao seu redor:
Solução para evitar colisões da Sense Aeronautics.
Sistemas baseados em sensores
Os projetos baseados em sensores são a espinha dorsal da maioria das configurações de prevenção de obstáculos. Eles podem incluir:
LiDAR: Oferece mapeamento ambiental 3D de alta resolução e se destaca em cenários externos e de longo alcance. Comumente usado em UAVs e veículos terrestres autónomos.
Radar: Robusto contra neblina, chuva e poeira, tornando-o adequado para plataformas aéreas e terrestres.
Sensores ultrassónicos: económicos e fiáveis para deteção de curto alcance, normalmente encontrados em UGVs internos ou drones que operam em baixas altitudes.
Sensores infravermelhos: úteis em ambientes com pouca luz ou contraste térmico, frequentemente encontrados em aplicações de defesa ou noturnas.
Sensores baseados em visão (câmaras): Utilizam câmaras monoculares, estéreo ou RGB-D para gerar mapas de profundidade e imagens ambientais para identificação de obstáculos.
Sistemas de visão computacional
Os sistemas avançados de prevenção de colisões utilizam visão computacional com IA para interpretar os dados da câmara, permitindo-lhes classificar e prever o movimento dos obstáculos. Estes algoritmos permitem que os drones «compreendam» as cenas, distinguindo entre objetos estáticos e dinâmicos, como peões ou veículos.
A navegação baseada em visão também suporta SLAM (Localização e Mapeamento Simultâneos), essencial para navegar em ambientes desconhecidos. Estes sistemas são especialmente úteis em UAVs que voam em áreas sem GPS, canyons urbanos ou interiores.
Sistemas de fusão de sensores
Para melhorar a robustez, muitos sistemas modernos integram vários sensores, combinando dados LiDAR com imagens de câmaras ou entradas de radar. Esta abordagem de fusão de sensores aumenta a fiabilidade e a precisão, especialmente em cenários críticos ou imprevisíveis. Por exemplo, um drone pode usar LiDAR para mapeamento estrutural e radar para manter a consciência de obstáculos em condições climáticas adversas.
Componentes de um sistema de prevenção de colisões
A conceção de um sistema fiável de prevenção de colisões envolve uma integração complexa de elementos de hardware e software. Estes componentes trabalham em conjunto para garantir que os sistemas não tripulados possam navegar com segurança em ambientes dinâmicos e imprevisíveis.
Sensores
Os «olhos e ouvidos» do veículo, que recolhem dados ambientais brutos através da deteção de proximidade, imagens térmicas ou sensores óticos:
A camada de inteligência que interpreta os dados e determina as estratégias de navegação utilizando métodos baseados em regras ou impulsionados por IA:
Algoritmos de deteção e rastreamento de objetos
Lógica de planeamento de trajetória e ajuste de trajetória
Modelos de visão computacional baseados em IA
Mapeamento ambiental e algoritmos SLAM
Interface de controlo
Traduz os resultados do software em movimentos físicos ou alterações operacionais no veículo:
Mecanismos de redundância e à prova de falhas são frequentemente incorporados em aplicações críticas para garantir o funcionamento contínuo em caso de falha de um componente, aumentando a confiabilidade do sistema de prevenção de colisões em cenários de missão crítica.
Prevenção de colisões em várias plataformas não tripuladas
Embora os princípios básicos permaneçam consistentes, a implementação da prevenção de colisões varia significativamente entre os tipos de plataforma:
Sistemas aéreos (UAVs)
Os drones e os UAVs utilizam uma combinação de sistemas de visão, LiDAR e radar para evitar colisões no ar, o que é particularmente importante em operações além da linha de visão (BVLOS) envolvendo drones e prevenção de obstáculos. Os drones com prevenção de obstáculos são cruciais para entrega de encomendas, inspeção de infraestruturas e pulverização agrícola, uma vez que operam frequentemente perto de pessoas ou estruturas.
Sistemas terrestres (UGVs)
Os UGVs utilizam sensores de proximidade e mapeamento em tempo real para navegar em armazéns, fábricas ou terrenos irregulares. Eles devem lidar com objetos estáticos, como paletes, bem como obstáculos dinâmicos, como trabalhadores ou veículos. Os sistemas de navegação seguros para UGVs priorizam a deteção de obstáculos com baixa latência e o planeamento suave de trajetórias para garantir uma navegação segura.
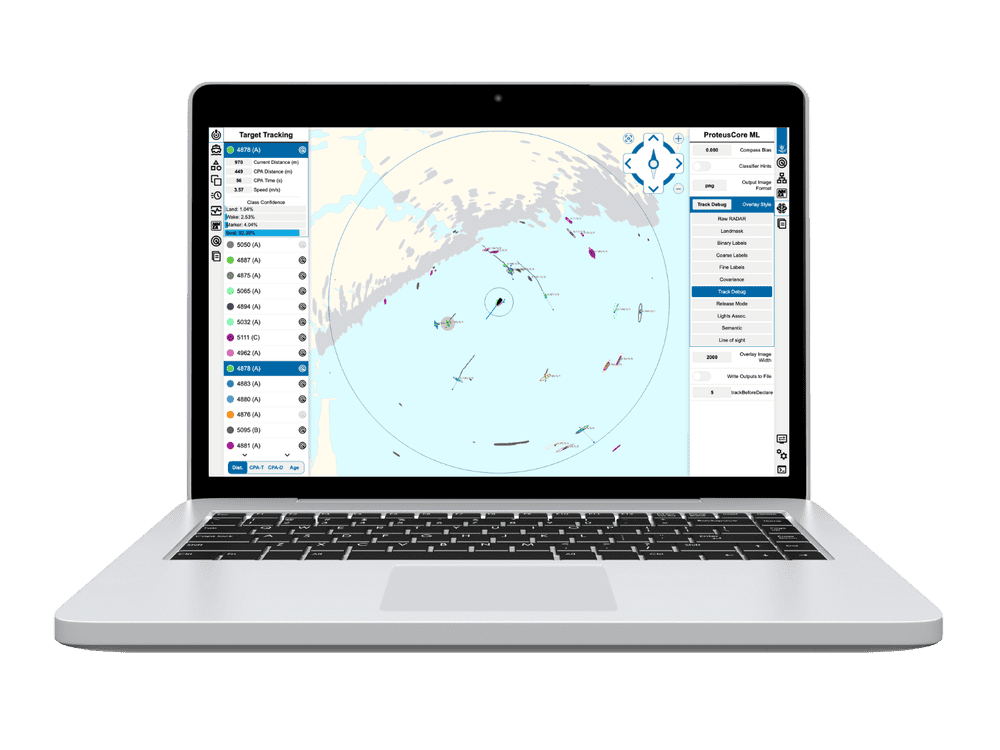
Sistemas de superfície e marítimos (USVs/UUVs)
As embarcações autónomas aquáticas dependem frequentemente de radares, sonares e algoritmos baseados em COLREGs para navegar com segurança nas vias navegáveis. Estes sistemas avaliam o comportamento de outras embarcações, seguindo as regras internacionais de prevenção de colisões, ao mesmo tempo que evitam bóias, docas e vida selvagem.
Aplicações da tecnologia de prevenção de colisões
Uso comercial
Empresas de retalho, logística e comércio eletrónico utilizam UAVs e UGVs com sistemas de deteção de obstáculos para automatizar entregas e logística interna. Os drones com prevenção de colisões reduzem o risco em ambientes urbanos, permitindo entregas de última milha sem colocar em risco pedestres ou propriedades.
Uso industrial
Em armazéns e fábricas, os sistemas de prevenção de colisões em robôs móveis autónomos (AMRs) ajudam a otimizar o manuseamento de materiais e a movimentação de inventário. Em canteiros de obras, UGVs robustos com LiDAR para prevenção de obstáculos manobram com segurança em terrenos em constante mudança.
Utilização militar
Na defesa, a prevenção de colisões desempenha um papel fundamental em plataformas autónomas e semiautónomas. Desde drones ISR (inteligência, vigilância, reconhecimento) a veículos terrestres não tripulados, estes sistemas permitem que as unidades operem de forma independente em ambientes contestados ou sem GPS. A navegação baseada em visão e os sistemas DAA ajudam a manter a integridade da missão, mesmo em condições de guerra eletrónica.
Relação com os sistemas de deteção e prevenção de colisões
Embora intimamente relacionados, os sistemas de deteção e prevenção de colisões (DAA) são especificamente concebidos para cumprir os requisitos regulamentares e operacionais para aeronaves não tripuladas que voam em espaço aéreo partilhado, especialmente durante operações BVLOS. Os sistemas DAA incorporam deteção de longo alcance e, muitas vezes, incluem coordenação com outros sistemas de gestão de tráfego aéreo.
Os sistemas de prevenção de colisões, por outro lado, são projetados para evitar obstáculos de curto a médio alcance e são usados em todos os domínios não tripulados.
Evolução da prevenção de colisões
A prevenção de colisões permite que drones, robôs e embarcações autónomas operem com maior segurança, precisão e independência. Ao integrar uma gama diversificada de sensores, desde LiDAR e radar a sistemas de visão, e combiná-los com software avançado e IA, as plataformas não tripuladas atuais podem detetar e navegar em torno de obstáculos de forma fiável.
À medida que os sistemas não tripulados continuam a evoluir, o mesmo acontecerá com a sofisticação dos seus sistemas de mitigação de colisões, avançando para a autonomia total em ambientes dinâmicos. Seja no apoio à entrega autónoma por drones, à logística de armazéns ou à vigilância de defesa, a prevenção de colisões continuará a ser fundamental para o crescimento e a segurança das operações não tripuladas.