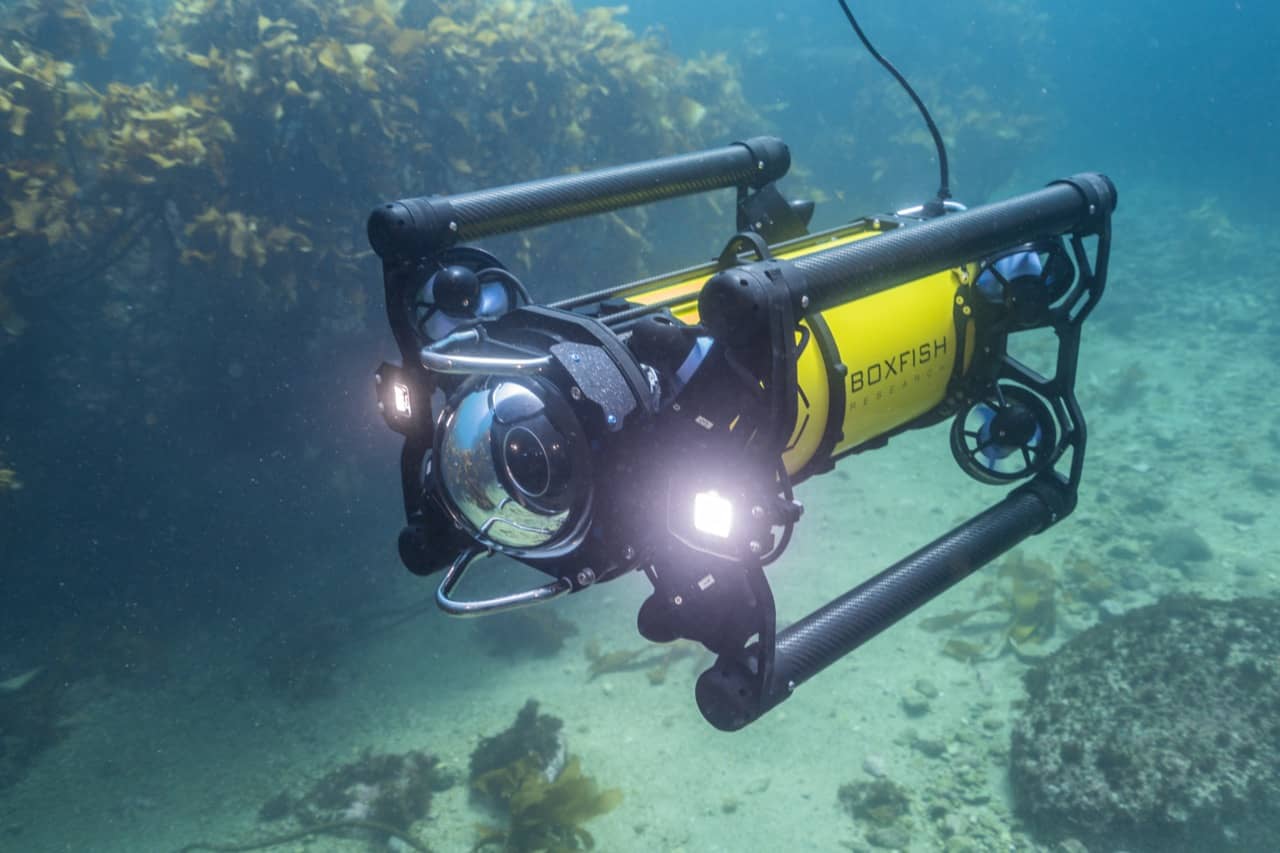
Boxfish Robotics develops hovering autonomous underwater vehicles (AUVs) designed for low altitude imaging, mapping, and environmental survey tasks where maintaining precise positioning and route consistency is essential. Within this operating framework, obstacle avoidance serves as a key element of vehicle autonomy, enabling missions to continue safely while preserving survey quality and data integrity. Read more >>
In underwater environments, obstacles frequently emerge without prior documentation. Infrastructure, changing seabed relief, moorings, debris, and biological formations can all appear unexpectedly during operations. Without autonomous obstacle response capabilities, vehicles often need to maintain greater stand off distances from the seafloor, follow more conservative operating profiles, or rely heavily on operator supervision and preexisting site information.
For AUVs intended to operate independently in complex marine environments, obstacle detection and response are therefore central to mission execution rather than supplementary functions.
Combining Two Obstacle Awareness Approaches
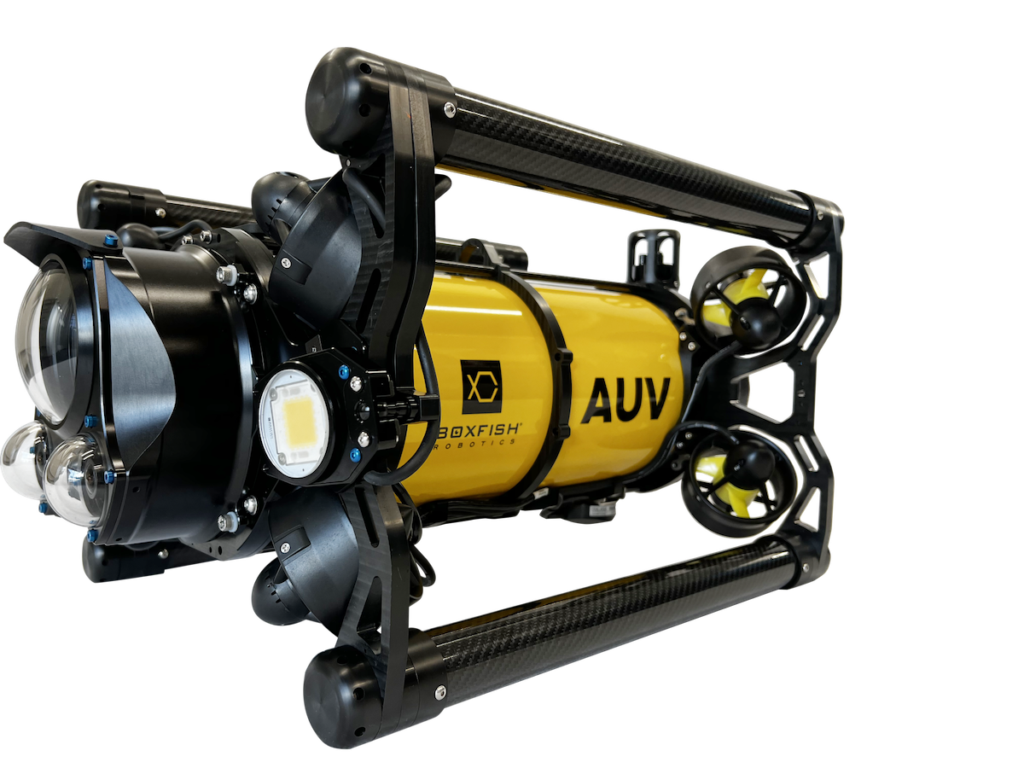
The hovering Boxfish AUV incorporates both Doppler Velocity Log (DVL) based sensing and stereo camera driven perception to support obstacle response under varying environmental conditions.
DVL based obstacle awareness enables the vehicle to maintain accurate altitude and terrain following relative to the seabed. Continuous measurement of bottom distance allows the AUV to identify rising terrain, walls, rocks, or unexpected seabed features and modify its altitude profile to avoid contact while maintaining stable vehicle movement.
This capability is supplemented by stereo camera based obstacle detection, which identifies individual objects appearing within the vehicle’s forward operating field. This additional sensing layer can be especially useful for vertical or isolated structures such as poles, cables, or infrastructure components that may not be represented effectively through seabed referenced sensing alone.
Together, the two systems provide the Boxfish AUV with the ability to respond to both broad terrain variation and localized obstacles encountered during a mission.
Maintaining Survey Objectives During Autonomous Operations
For environmental monitoring and mapping applications, avoiding a collision is only one part of the operational requirement. Survey outcomes also depend on preserving route consistency and maintaining the intended geometry of data collection.

Maintaining path continuity supports uninterrupted spatial coverage, predictable survey geometry, and consistent image overlap. These factors are important considerations for downstream analysis and long term environmental monitoring efforts where repeatability between datasets is required.
Obstacle Response During Survey Execution
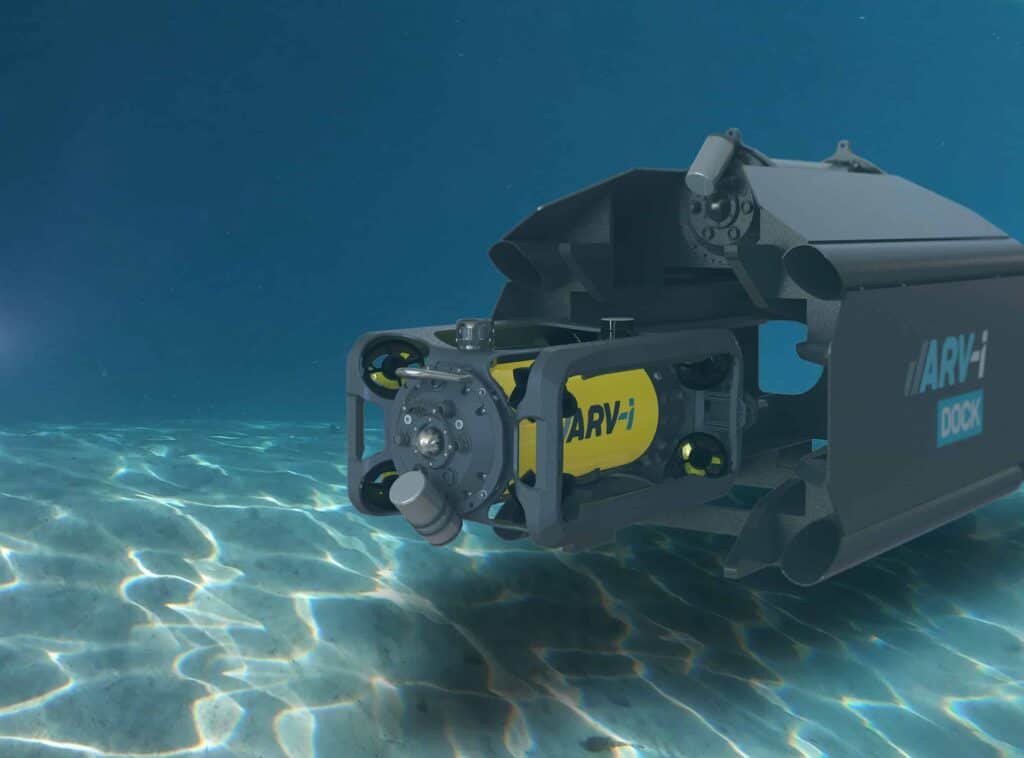
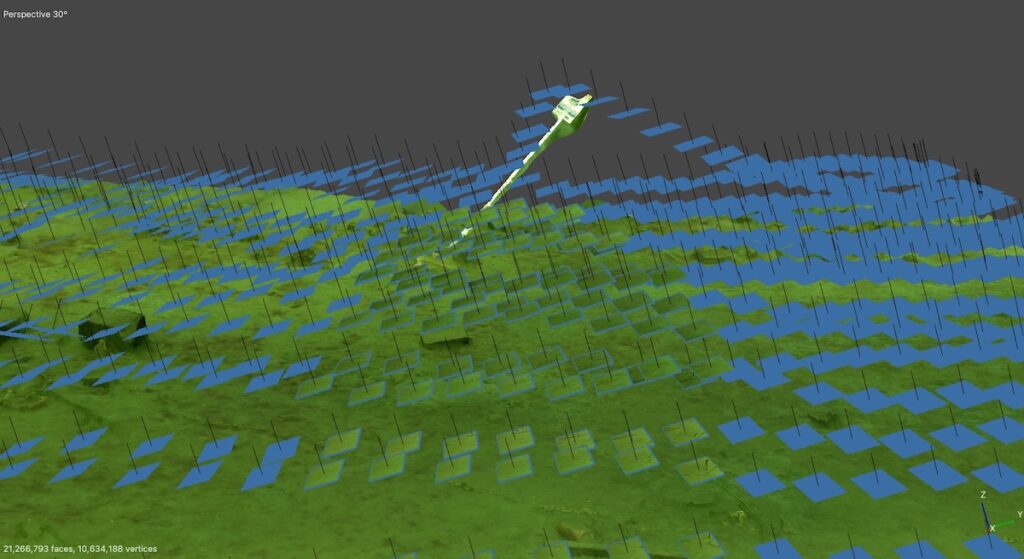
A practical example illustrates how these principles are applied during autonomous operation. During an AUV transect survey, the vehicle encountered a submerged road sign positioned directly along its intended route. After detecting the structure, the AUV adjusted its trajectory and climbed over the obstacle while remaining aligned with the planned survey path.
The maneuver allowed the survey to continue with minimal interruption while maintaining continuity in data collection across the area of interest.
Supporting Reliable Autonomous Marine Operations
Obstacle avoidance reduces the risk of vehicle collision, but its broader significance lies in supporting confidence in autonomous underwater systems. Reliable handling of unexpected conditions allows operators to conduct missions at lower altitudes and with reduced dependence on continuous intervention.
For applications that include environmental monitoring, seabed mapping, and infrastructure inspection, this contributes to:
- Reduced mission interruption
- Less operator involvement during surveys
- More repeatable and dependable datasets
As autonomous underwater systems take on increasingly complex marine tasks, obstacle avoidance remains a practical requirement for enabling scalable and consistent real world survey operations.