Showcase your capabilities
If you design, build or supply Flight Control Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Flight control systems are critical to the safe and efficient operation of unmanned aircraft. They ensure stability, maneuverability, and adherence to programmed flight paths. These systems integrate multiple components, including autopilots, flight controllers, and control surfaces, to deliver precise control over flight dynamics. By understanding the design and functionality of flight control systems, operators and engineers can optimize UAV performance for diverse applications in industries ranging from defense to agriculture.
Read the Technology Overview

Rugged Computing Solutions for Mission-Critical Command, Control & Communications

Military-Grade UAV Autopilot Systems for Advanced & Ultra-Reliable Flight Control
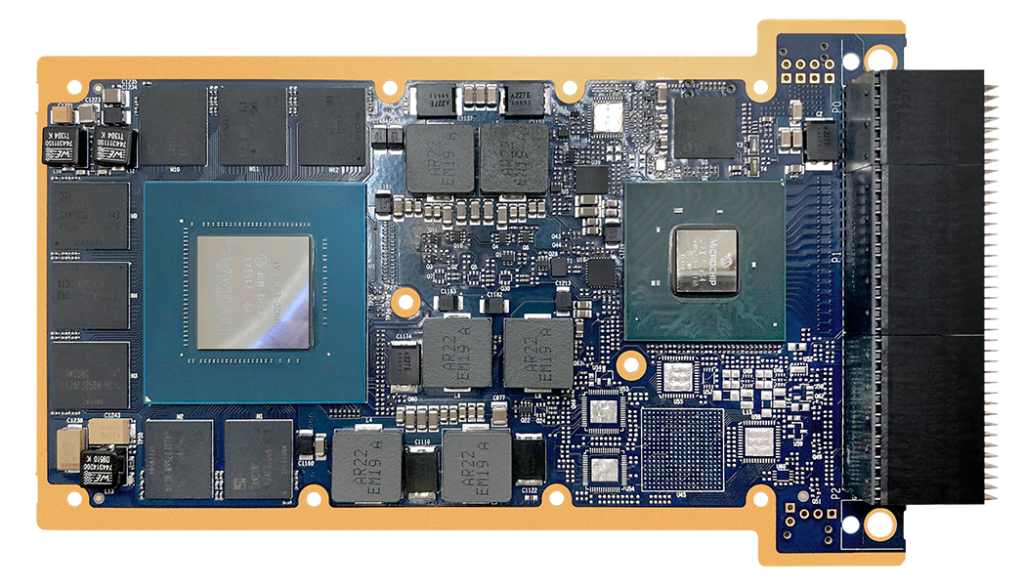
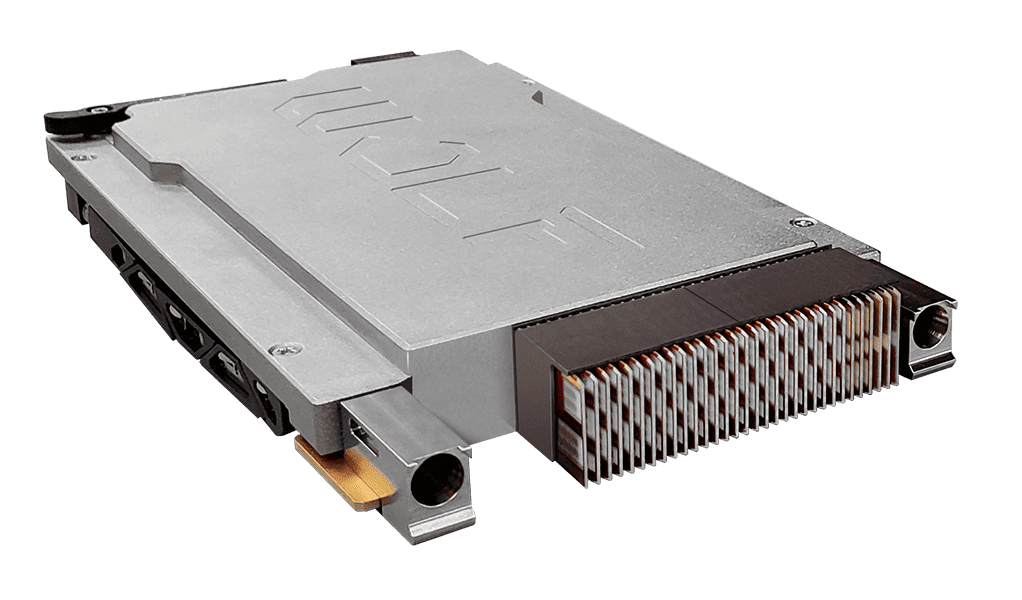
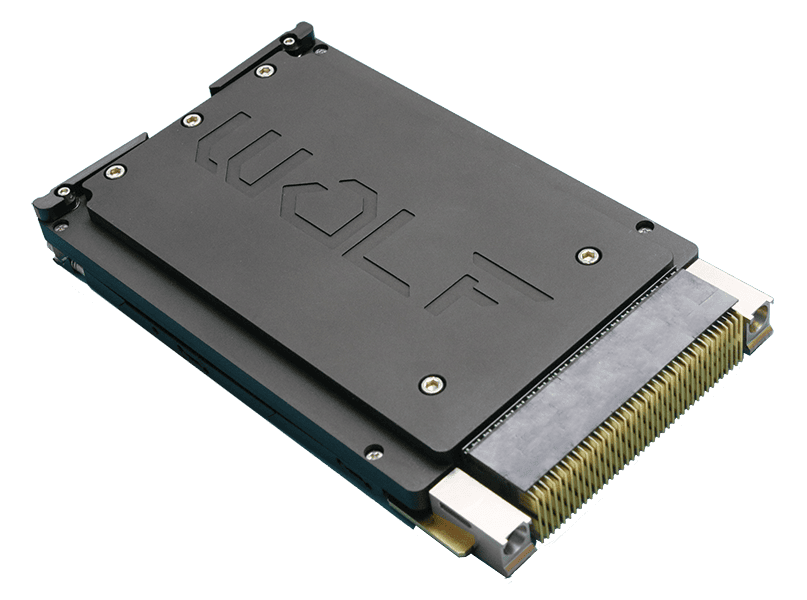
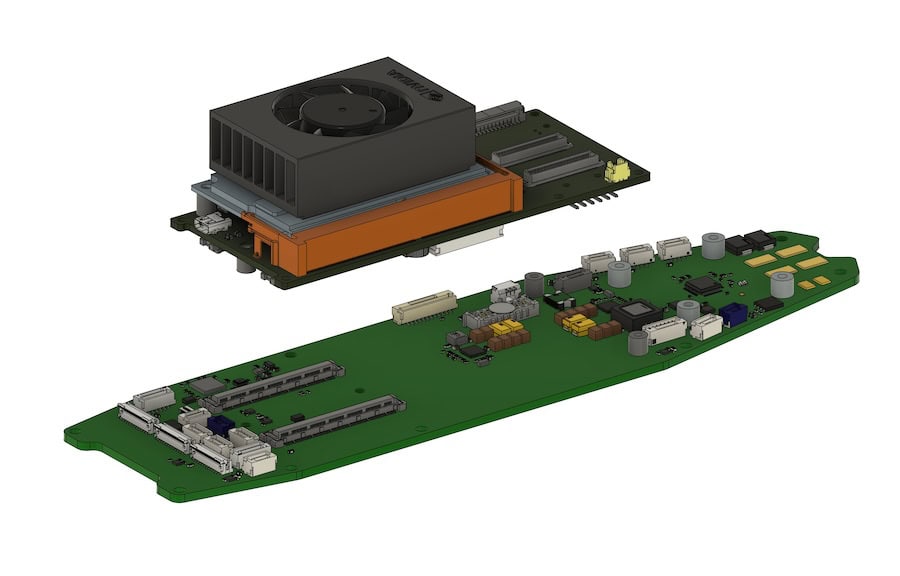
Rugged Computing and Video I/O Modules: 6U & 3U VPX, XMC, VNX+, and other Small Form Factors and Custom Solutions

BVLOS Solutions for UAS & UAM: Fuel Cells, Radar, Navigation Sensors, Flight Control & SATCOM

Dual-Use Unmanned Aircraft for Logistics, Medical Transport, ISR & Tactical Support

Custom & COTS Hardware & Software Solutions for Next-Generation Vehicle Systems

Industrial-Grade Embedded Computer Systems for AI Edge Computing & Machine Learning

UAV Autopilot Flight Controllers, Ground Stations, ESC Controllers & Tracking Antennas
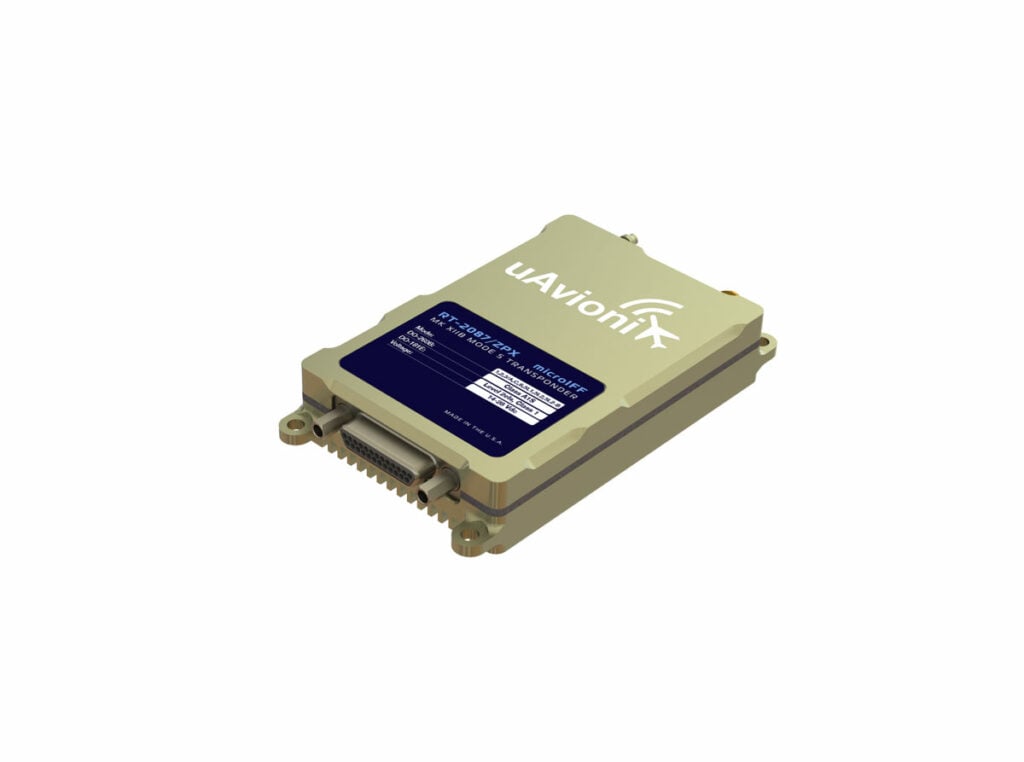
Certified UAV Communications, Navigation, Control, Surveillance, and Combat ID Solutions


Professional UAV Components & Sensors: Drone Flight Controllers, GNSS Modules, Telemetry Solutions
Cutting-Edge Drone Autopilots & UAS Platforms | Hardware & Software Solutions for Drones & Unmanned Systems

Cutting-Edge Flight Controllers, Sensors, and Other Electronics Technologies for Drones & Robotics

Drone Software Engineering Consultancy Providing Comprehensive UAV Platform Development Services

High-Performance Drone Batteries, Power Management Systems, Fleet Management Software, Solar MPPT Integration, Celular C2 & Payload Communications


Embedded Controllers, Avionics Testing, HIL Simulation & Data Acquisition Systems for UAV/UAS Applications

Autonomous UAS, Research & Inspection UAVs for Industrial Inspection, Survey & Mapping

Brushless Servo Actuators & Linear Actuators for UAV, Robotics & Unmanned Systems


Marine Autopilots, Unmanned Surface Vehicle Communications, Power Management Modules & Marine Simulators & Software


UAV Hardware Solutions: Propulsion & Fuel Systems, Servos & Flight Controllers, Imaging Solutions, Launchers & Parachutes

If you design, build or supply Flight Control Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Flight control systems are the integrated technologies and mechanisms that manage an unmanned aircraft’s orientation, trajectory, and stability during flight. Unlike individual components such as flight controllers, flight control systems encompass the entire suite of hardware and software used to execute and maintain controlled flight.
At their core, flight control systems handle the real-time adjustment of control surfaces, such as ailerons, rudders, elevators, and propellor pitch based on input from pitot probes and other sensors, ground control stations (GCS), and onboard flight computers. These adjustments ensure the UAV can respond to environmental factors, follow programmed flight paths, and achieve mission objectives efficiently.

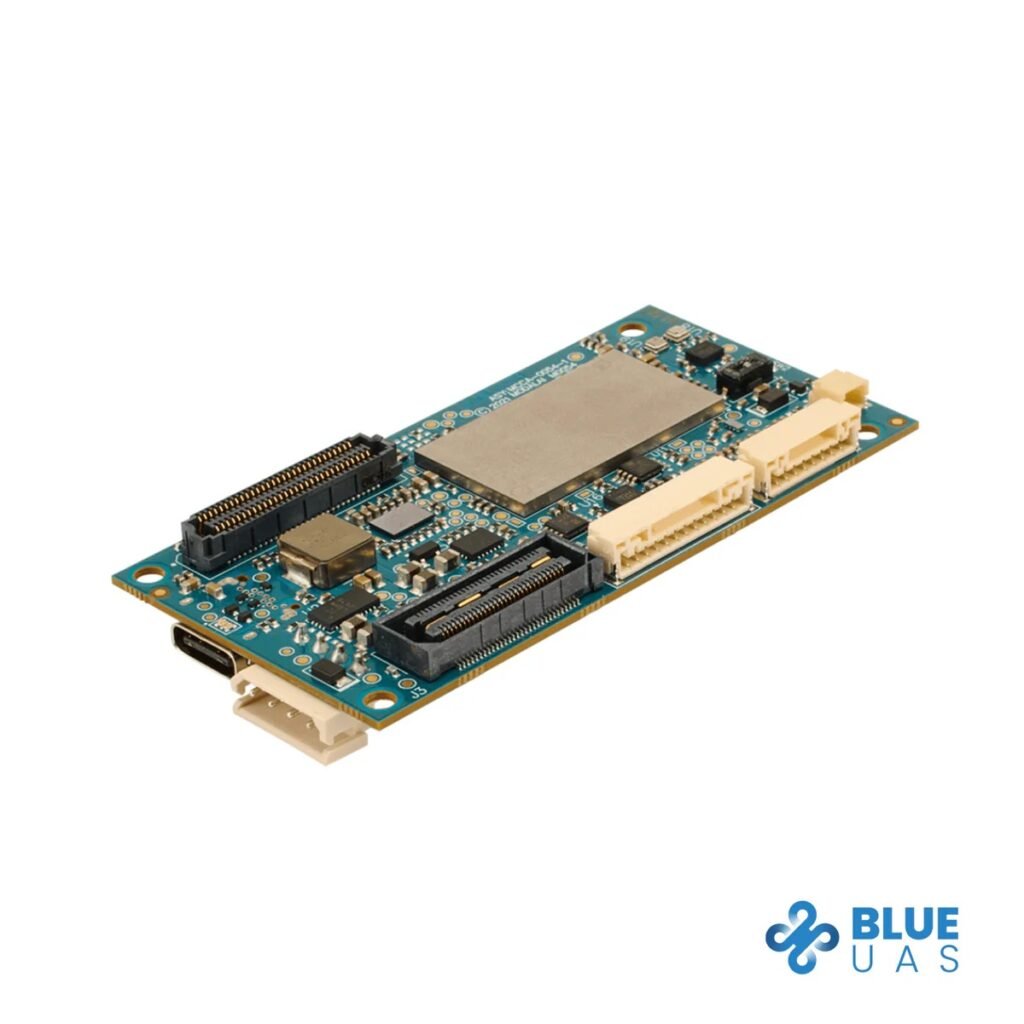
ARK Pi6X Flow Flight Controller from ARK Electronics.
Flight controllers are the central processing units of flight control systems. They interpret data from sensors such as accelerometers, gyroscopes, and air data systems. They execute commands to adjust the UAV’s control surfaces, maintaining stability and responding to user or autopilot inputs.
Autopilot systems are often integrated into flight control systems to enable fully automated or semi-automated flight. These systems use algorithms to manage altitude, heading, and navigation without constant human intervention. By working alongside flight controllers, autopilot systems can enhance mission efficiency and reduce operator workload.
Control surfaces, such as rudders, ailerons, and flaps, play a critical role in adjusting the orientation and stability of fixed-wing UAVs. These components receive precise commands from the flight controller, which calculates the necessary adjustments based on flight dynamics and environmental inputs.
Rotor control systems manage stability and maneuverability in multirotor drones. These systems adjust the speed and thrust of individual rotors to achieve the desired changes in pitch, roll, and yaw. Rotor control systems work in tandem with flight controllers to provide fine-tuned control, enabling stable hover, rapid directional changes, and efficient navigation.

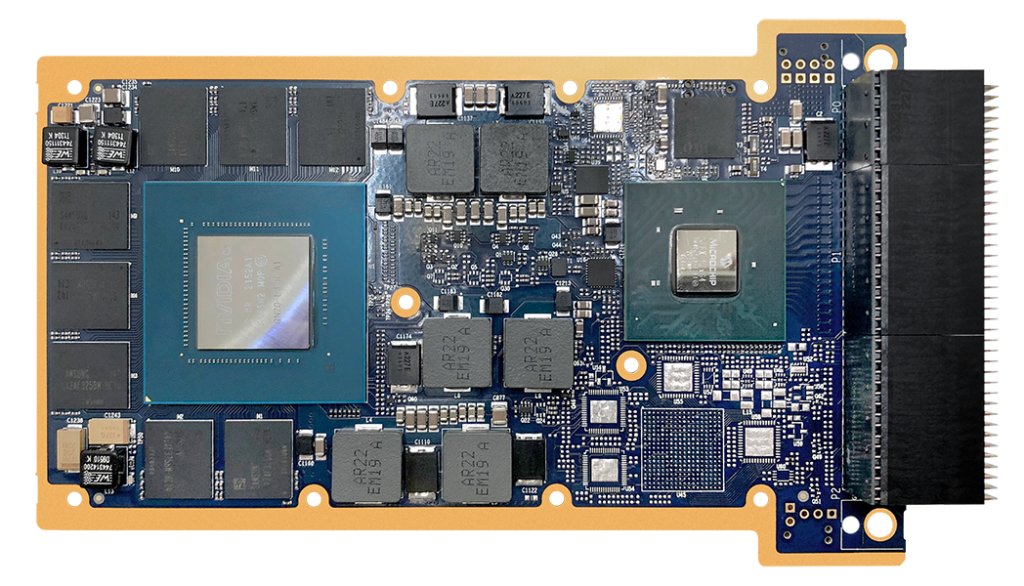
Drone and robotic autopilot by CubePilot.
Flight control systems, whether using control surfaces or rotor systems, ensure that the UAV responds effectively to operator commands, environmental conditions, and programmed flight paths.
Flight control systems enable unmanned aircraft to operate effectively across a wide range of applications, including:

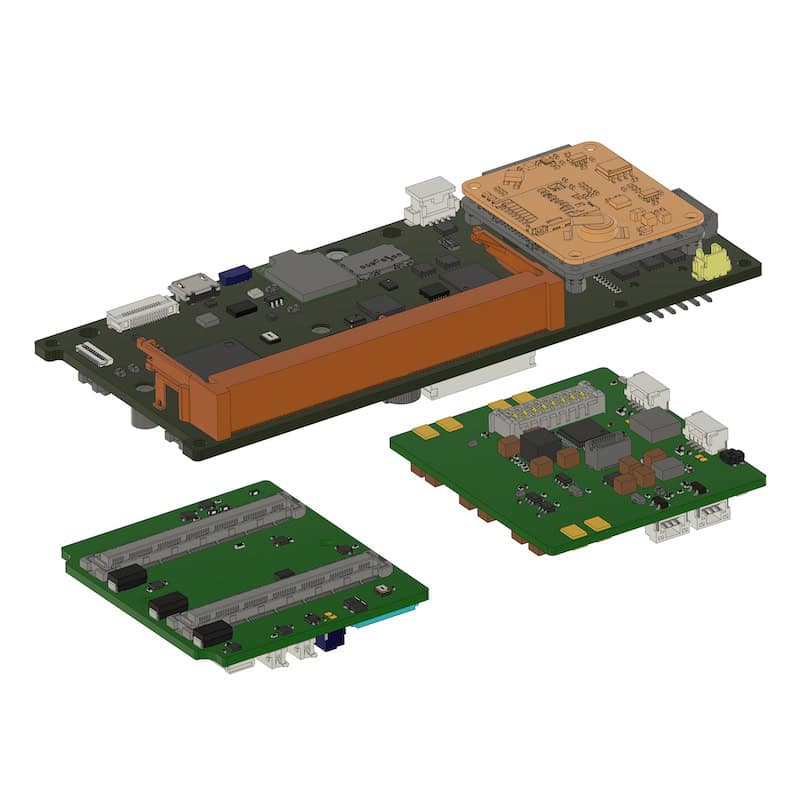
UAV flight control system, Veronte Autopilot, from Embention.
Flight control systems can vary in complexity based on the UAV’s intended application:
While flight controllers form the computational backbone of flight control systems, the latter represents a more comprehensive suite of technologies. Flight control systems include the integration of mechanical components, such as control surfaces, as well as auxiliary systems like AHRS and air data systems, to achieve seamless UAV operation.
Flight control systems are the cornerstone of unmanned aircraft technology, integrating critical components such as flight controllers, autopilot systems, and control surfaces to enable precise and reliable UAV operation. By combining advanced sensor data with robust software algorithms, these systems ensure stable, efficient, and mission-ready performance across a variety of industries.

 Searching Companies & Products
Searching Companies & Products




 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.