Find Drone Actuator manufacturers and suppliers of actuation systems for UAV, UAS, UGVs, USVs, UUVs and robotics, including control, linear and rotary servo actuators
If you design, build or supply Actuators & Actuation Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
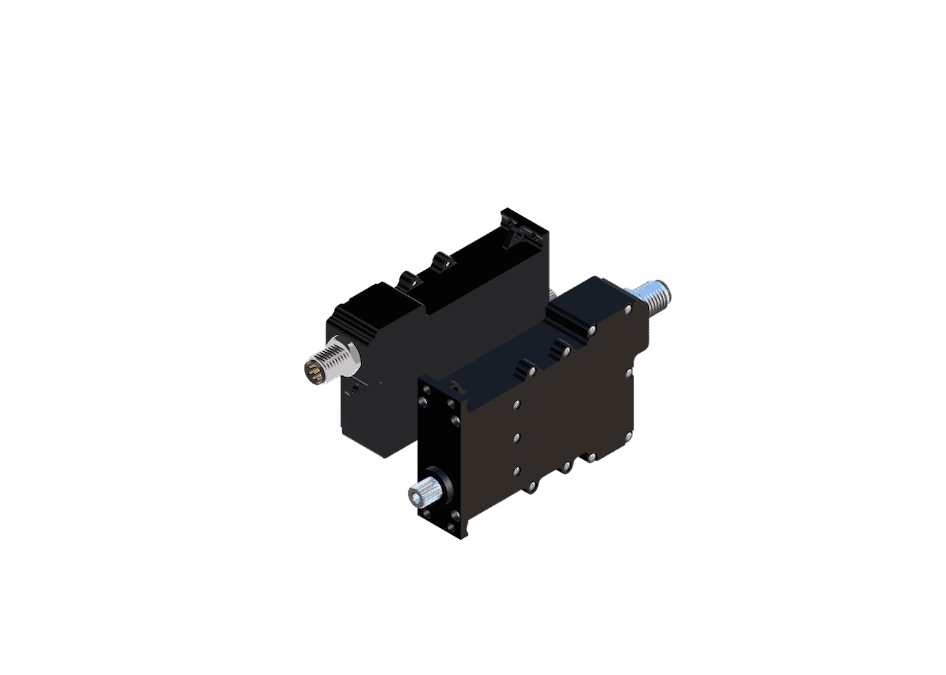
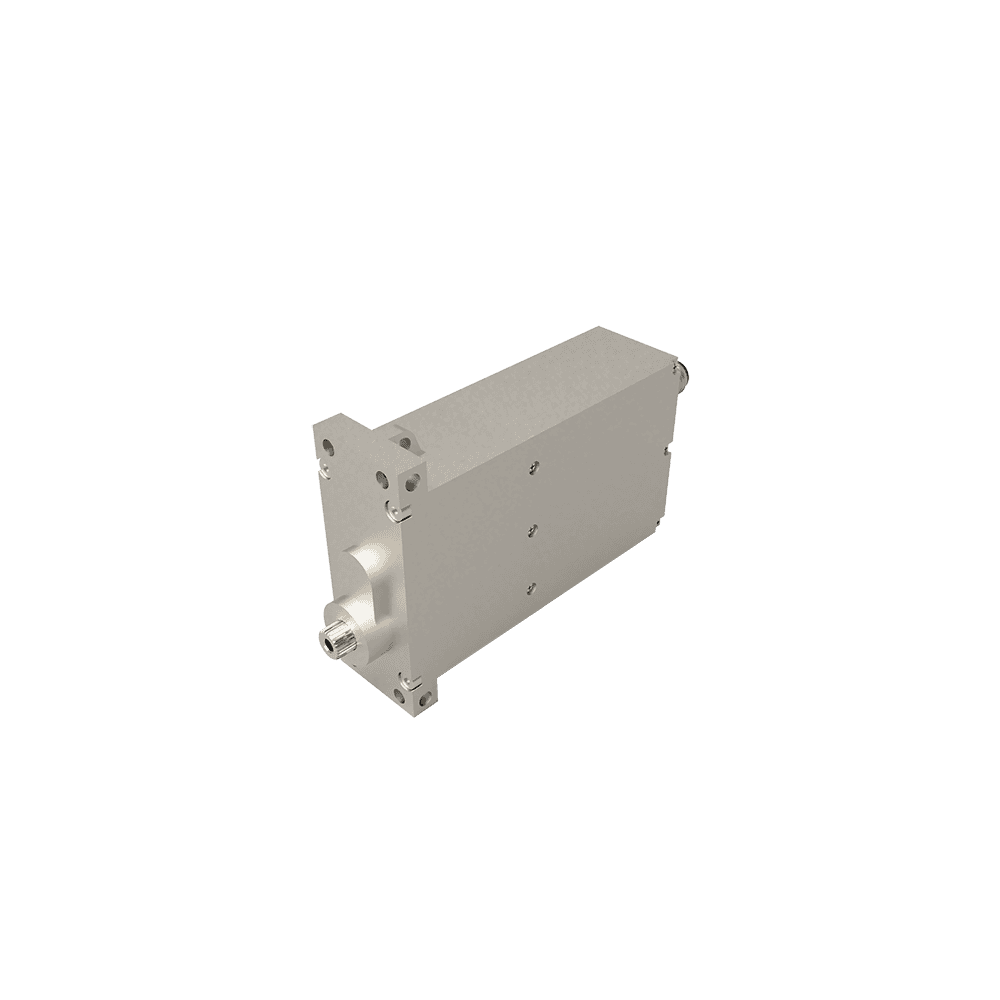
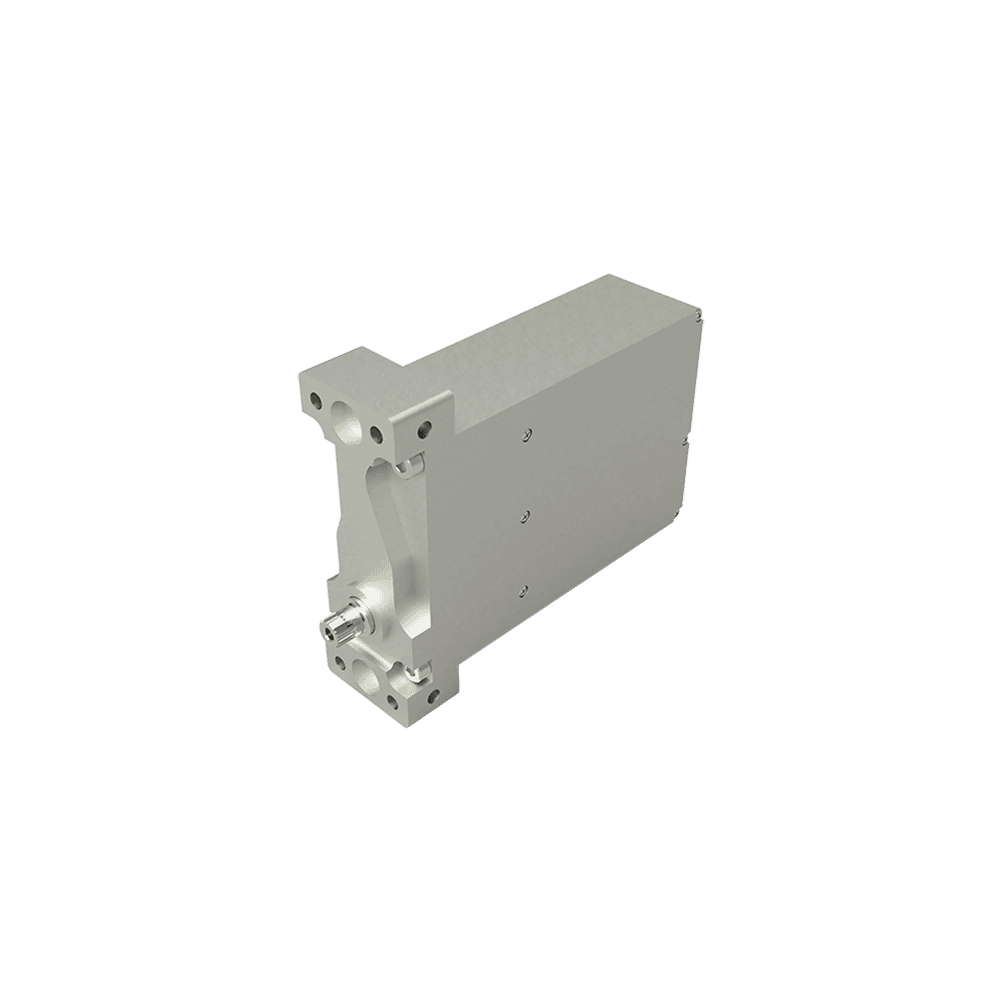
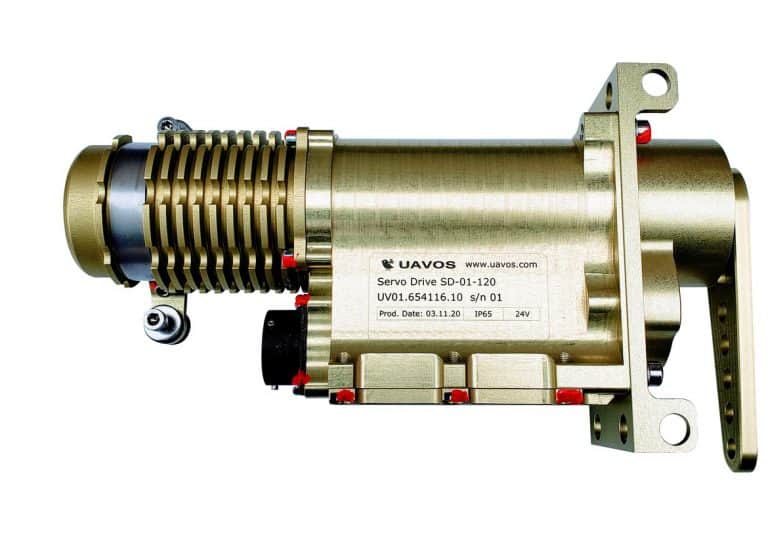
Heavy-duty and UAVCAN servo actuators for robotics and unmanned systems
Heavy-duty and UAVCAN servo actuators for robotics and unmanned systems
...ted heavy-duty actuators for robotics and unmanned systems features high-resolution programmable... ......The MD Series of waterproof actuators additionally features IP67 rated casings.
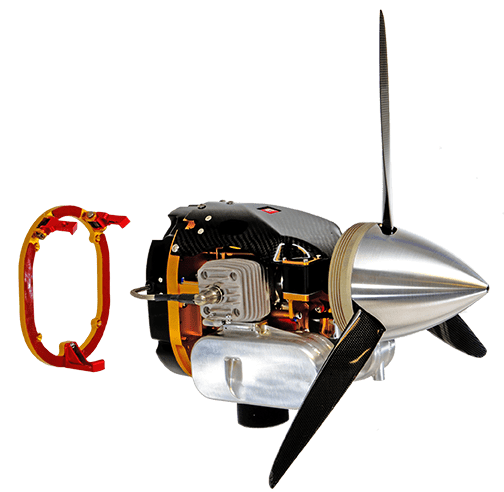
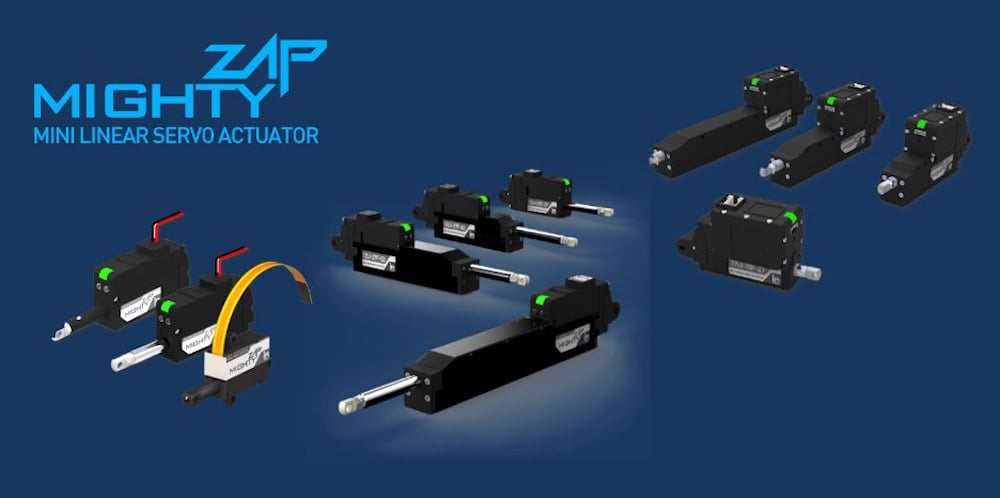
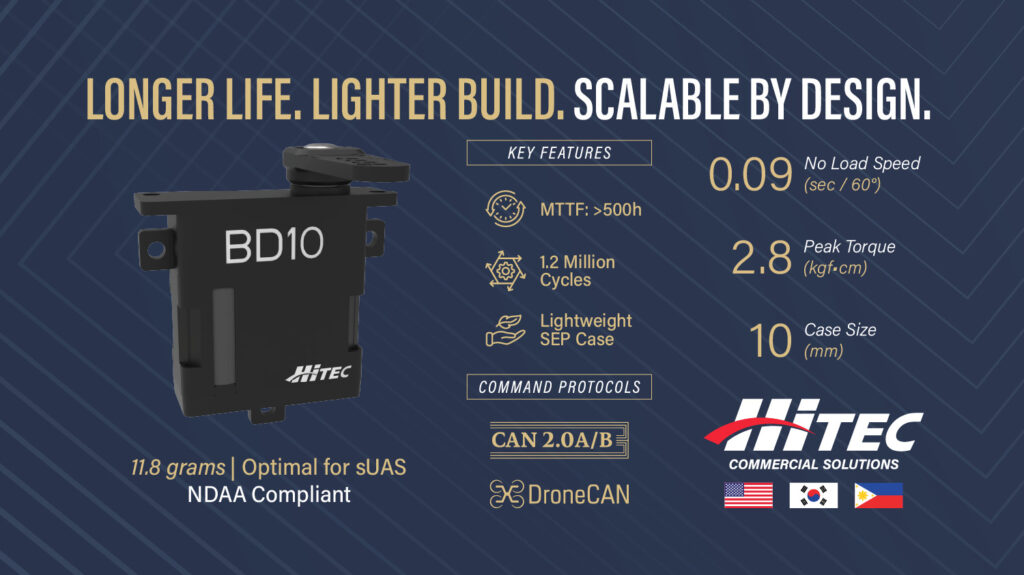
Compact & high-precision micro-linear actuators for UAV motion control
Compact & high-precision micro-linear actuators for UAV motion control
...ghtyZap linear actuators, manufactured by IR Robot in South Korea, are specialized micro-linear... ...owing multiple actuators to be daisy-chained on a single bus....
...formance servo actuator product ranges offering a wide variety of solutions for UAVs, UUVs and... ......ngs, with IP67-rated water and dust ingress protection. All actuators are fully...
Actuators are components that convert energy into mechanical motion in order to move or control a mechanism or system. They rely on an energy source such as electrical current, hydraulic pressure or pneumatic pressure, and are activated by a control signal such as voltage, current, pressure or human exertion. Actuators can be found in many subsystems of unmanned aerial vehicles (UAVs) and other robotic vehicles.
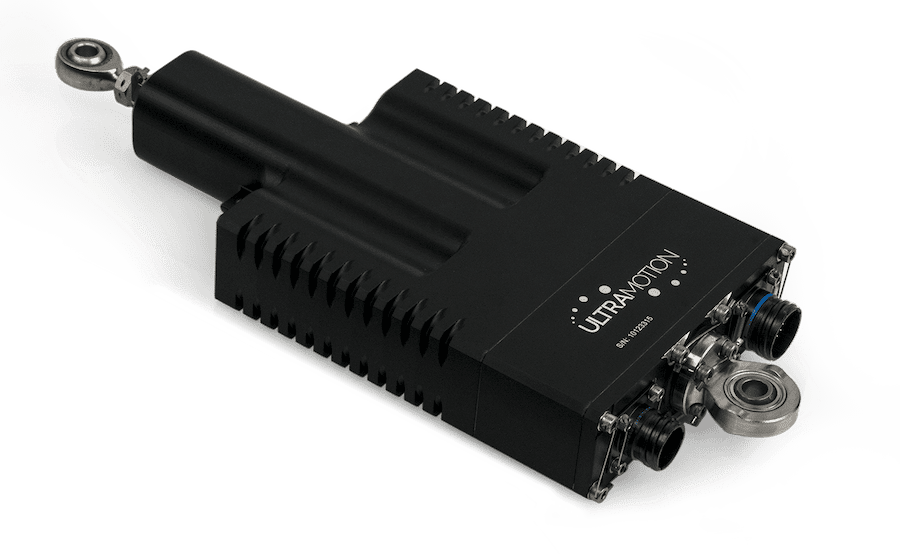
Linear Actuators
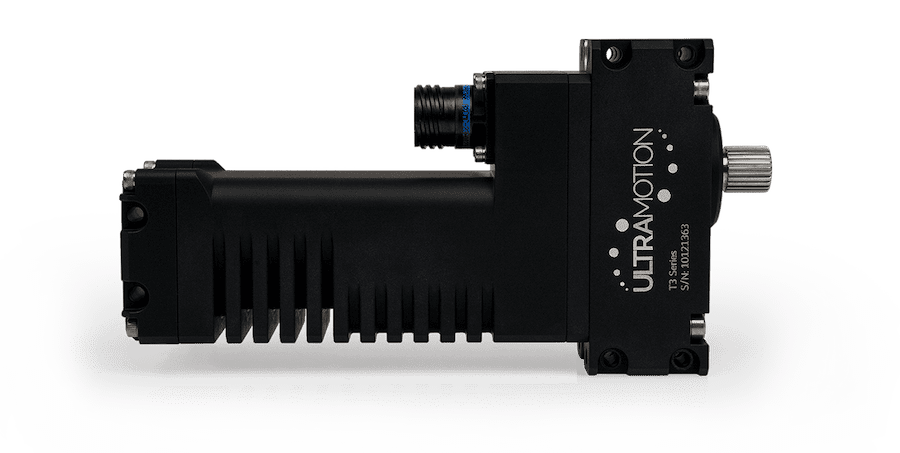
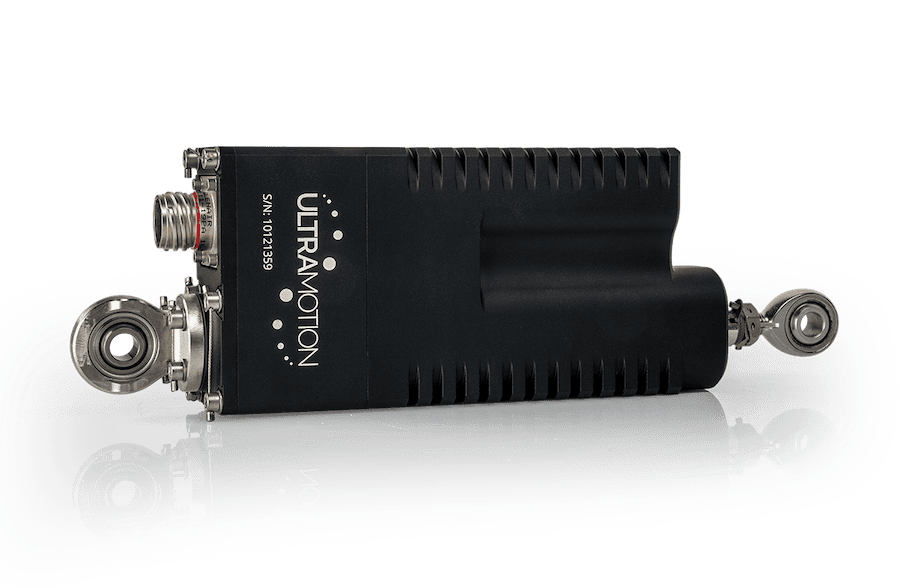
L-Series Linear Actuators by Ultra Motion
Actuators may commonly be linear, converting energy into a straight line motion, or rotary, which use a servo or brushless motor to produce rotational motion and provide mechanical torque.
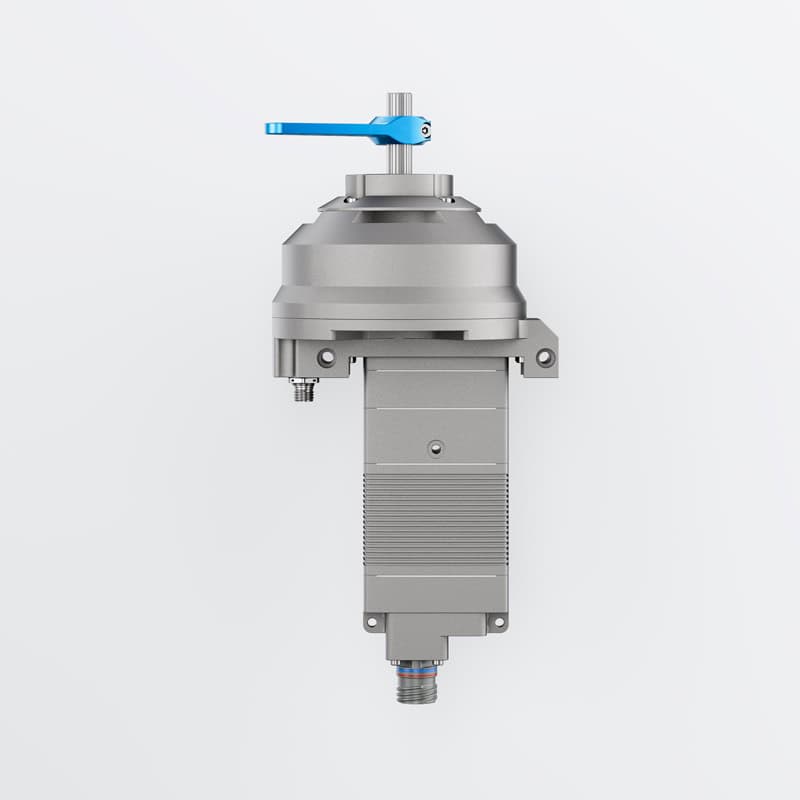
Rotary Actuators
Rotary actuators will either provide a limited angular stroke, or be capable of continuous rotation, which is useful for electro-optical targeting and other positioning and scanning systems on UAVs.
Flight Control Actuation Systems
Actuators are also commonly used to move flight and attitude control surfaces on UAVs, such as the elevator, ailerons, flaps and nose wheel. Other unmanned aircraft applications include opening and closing the throttle valve on combustion engines, as well as doors and hatches.
Actuators can be combined with an electromagnetic clutch which can be manually engaged or disengaged. Such a system can be found in Optionally Piloted Vehicles (OPVs), allowing the pilot to switch between unmanned and manned flight modes.
Underwater Actuators for AUVs, ROVs
For deep-sea and submersible applications, waterproof actuators can be housed in marine bronze or saltwater-resistant aluminium casings. These actuators are designed to operate under extremes of pressure and submersion and can be found on Remotely Operated Vehicles (ROVs), Autonomous Underwater Vehicles (AUVs) and other underwater robotics.
Redundancy Actuation
Actuation systems may provide redundancy by incorporating multiple motors, controllers, power sources and other components, thus creating a system architecture tolerant of single points of failure. These systems are important for safety-critical applications such as unmanned helicopters.
Actuator Types
Electric Actuators
DA 30-HT-MCCS Brushless Actuator by Volz Servos
Electric actuators are motor-driven devices that convert electric current input into mechanical motion, either linear or rotary. Linear motion is provided via a screw assembly that may be direct-, belt- or gear-driven, whereas rotary actuators use the output motion of the motor to provide torque.
Electric actuators are compact, relatively quiet and easier to interface into electrical systems than pneumatic or hydraulic actuators. They offer very precise positioning and high repeatability. Encoders can be used to provide complete control over position, velocity, torque, and applied force.
Depending on the design, initial costs of electric actuators may be higher than that of pneumatic and hydraulic actuators. They may also be unsuitable for certain environments such as flammable or electromagnetically sensitive areas.
The different motor types used in electric actuators include: DC, DC servo, DC brushless, DC brushless servo, AC, AC servo, and stepper.
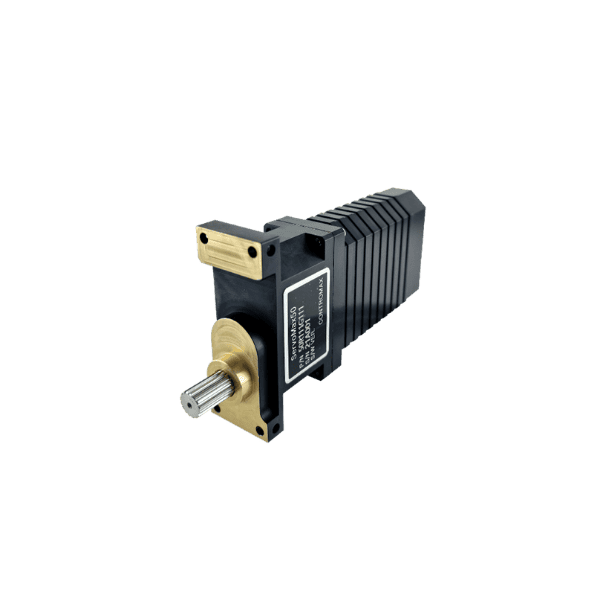
Servo Actuators
ServoMax 20 Rugged Servo Actuator by Contromax
Servo actuators are electric actuators that use additional circuitry and a closed-loop feedback mechanism to provide additional precision and control. The feedback signal is usually generated by a potentiometer or rotary encoder and is produced by comparing the servo’s output signal with a reference input signal.
Servos allow for precise control of position and velocity even while the motor is in motion. The direction of motion can be changed without having to reverse the polarity of the power supply.
Pneumatic Actuators
Pneumatic actuators use compressed air or other gases from an external compressor or a manual pump to move a piston within a cylinder. They may be single-acting, in which the piston returns to its original position by means of a spring, or double-acting, in which compressed air can be applied to either side of the piston.
Pneumatic actuators have a relatively simple construction and require little maintenance. However, due to pressure losses and air compressibility they are less efficient than other methods of generating linear motion. They also require a compressor to continually run and generate pressure even when no motion is required.
Hydraulic Actuators
Hydraulic actuators are similar in operation to pneumatic actuators, but use liquid to move a piston instead of gas. Because of the incompressibility of liquid, hydraulic actuators can provide greater output force than pneumatic actuators of the same size.
Hydraulic actuators may suffer loss of efficiency due to fluid leakage. They also require many auxiliary parts, making them bulky and more complicated to maintain.
Volz Servos details testing of its DA 15-N actuator during a 110,000-foot mission with Sent Into Space, demonstrating actuator operation in high-altitude environmental conditions and post-recovery functionality
Allient has published a new whitepaper exploring how motor selection impacts the performance of humanoid robotics systems, with a focus on actuator design, system behavior, and the challenges of delivering precise, high-torque motion in compact, real-world applications
Volz Servos’ customised DA 15-N actuators support Quantum Systems’ Twister electric vertical take-off and landing aircraft, delivering precise control of flight surfaces for reliable autonomous operations in confined environments
Following his tenure as Volz Servos' Technical Director, Dr. Vladislav Apostolyuk moves into the Chief Technology Officer role to lead engineering teams and advance flight control innovation
Ultra Motion examines how its advanced servo actuator technologies are powering next-generation unmanned systems across aerospace, defense, and subsea sectors
Volz Servos and Jetoptera collaborate to enable rapid thrust-vectoring and precise airflow control for a novel rotorless VTOL architecture that utilizes high-speed actuators to manage fluidic propulsion
Contromax will be attending Drone Show Korea, taking place from February 25 to 27 in Busan, Republic of Korea, where the company will be exhibiting at booth I09
The Volz-Avilus partnership integrates high-precision actuators to ensure safety and reliability in fully automated offshore and naval helicopter operations
Dec 01, 2025
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.