Showcase your capabilities
If you design, build or supply Waterproof Actuators, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Find Waterproof Actuator manufacturers and suppliers of subsea actuators for ROV, UUV, AUV, including underwater linear and rotary submersible actuators
Read the Technology Overview

Linear Servo Actuators - Servo Cylinder Actuators for Drones, USVs and Subsea Underwater Vehicles

Precision Electro-Mechanical Servo Actuators for Drones, UAVs, Unmanned Systems & Robotics


Brushless Servo Actuators & Linear Actuators for UAV, Robotics & Unmanned Systems

If you design, build or supply Waterproof Actuators, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.


DA 22-SUB Underwater Actuator by Volz Servos
Waterproof and water-resistant actuators are used in ROVs (remotely operated vehicles), AUVs (autonomous underwater vehicles) and UUVs (unmanned underwater vehicles) to move and control various mechanisms and subsystems in the vehicles. They work by converting energy into either linear or rotary mechanical motion, and may be electric, pneumatic or hydraulic.
Underwater and subsea actuators are engineered with different levels of waterproofing or water resistance. This may be defined by the IP (ingress protection) rating, with the second number of this representing the degree of protection against water. This may vary from protection against sprays and jets, to temporary immersion, through to prolonged immersion.
The material that a submersible actuator housing is made of will determine its resistance to corrosion. Common materials include titanium, marine stainless steel and marine bronze. Actuators may also use zinc sacrificial anodes that protect the main body of the actuator against corrosion. Subsea actuator connectors may be wet-mate, meaning they can be connected or disconnected underwater, or dry-mate, which cannot.

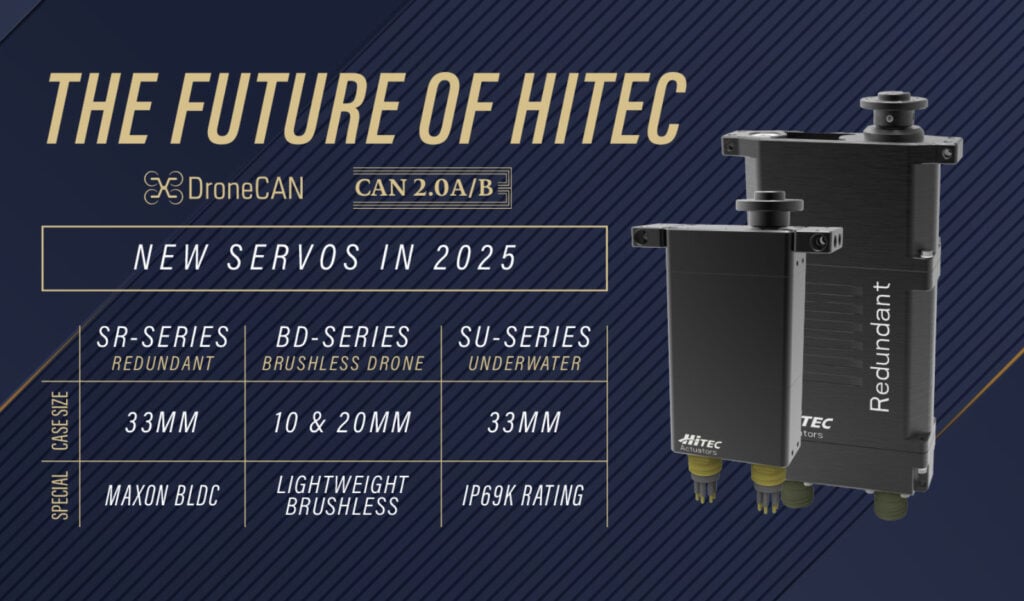
MD-Series Waterproof IP67-Rated Actuators by Hitec Commercial Solutions
Waterproof electric and other actuators may also be designed to resist different levels of pressure caused by being submerged at different depths. This may be done by using thicker material, which increases the size and weight, or by using pressure-balanced actuators that are filled with oil.
Waterproof linear and rotary actuators are used for a number of different applications in underwater robotics systems. These include adjusting steering fins, moving ROV arms and manipulators, opening and closing valves, and adjusting the angles of propulsion thrusters.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.