Showcase your capabilities
If you design, build or supply LiDAR Software, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Find developers of LiDAR Processing Software used for mobile mapping and survey by unmanned systems; drones, UAV, quadcopters, UGV and autonomous robotics.
Read the Technology Overview






Connecting High-Performance Spatial Analysis in the Office with Reliable Execution in the Field

GNSS Positioning & Navigation Systems, Mobile Mapping UAV LiDAR & Unmanned Surface Vehicles
If you design, build or supply LiDAR Software, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.


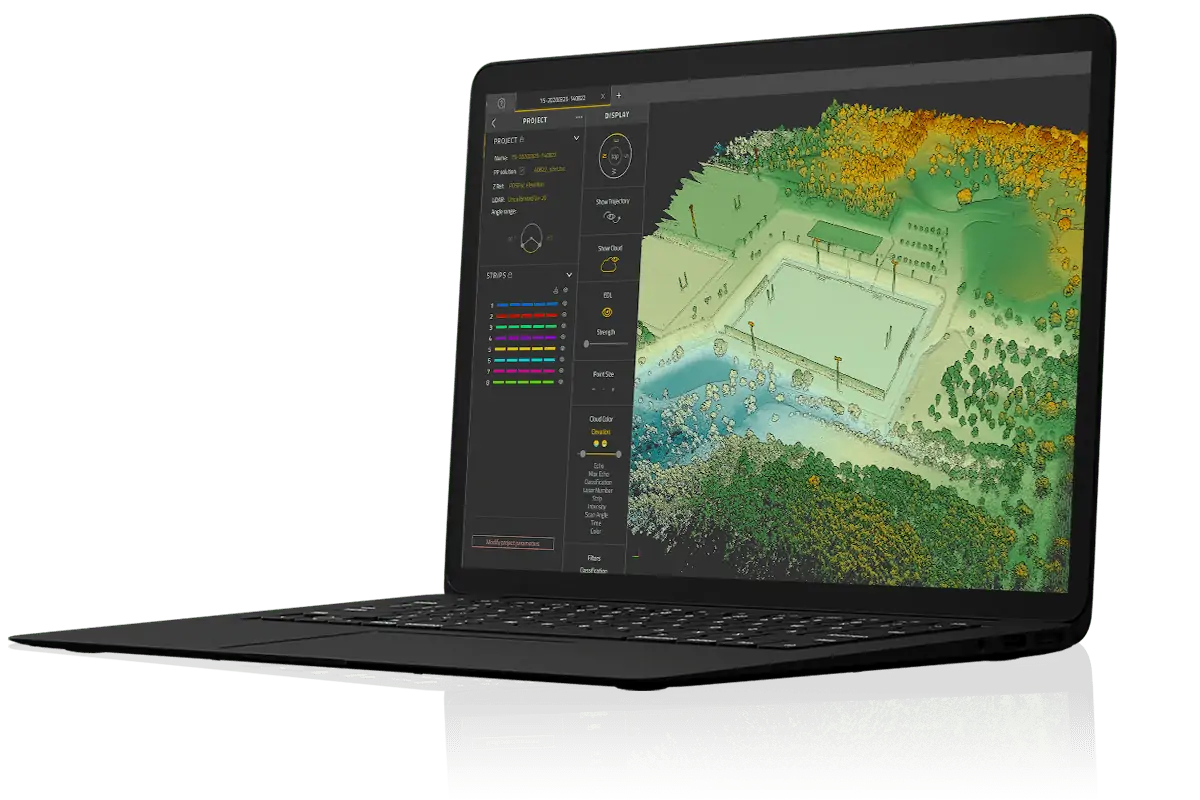
CoProcess Post-Processing Software by CHC Navigation
LiDAR post-processing software is used to convert the point cloud data captured by LiDAR scanners on UAVs (unmanned aerial vehicles), UGVs (unmanned ground vehicles) and other mobile mapping vehicles, into useful geospatial products and deliverables. These may include 3D models such as DSMs (digital surface models) and DTMs (digital terrain models) and high resolution maps. These software solutions form part of a wider ecosystem of drone software used to support unmanned operations, from mission planning and data processing to autonomy and fleet management.
LiDAR scans are line-of-sight, so in order to capture a complete 3D scene, multiple scans are needed from different angles. LiDAR software will seamlessly stitch these multiple datasets together to produce the final model. The process of aligning the different sets of points into a common co-ordinate system is known as point cloud registration.
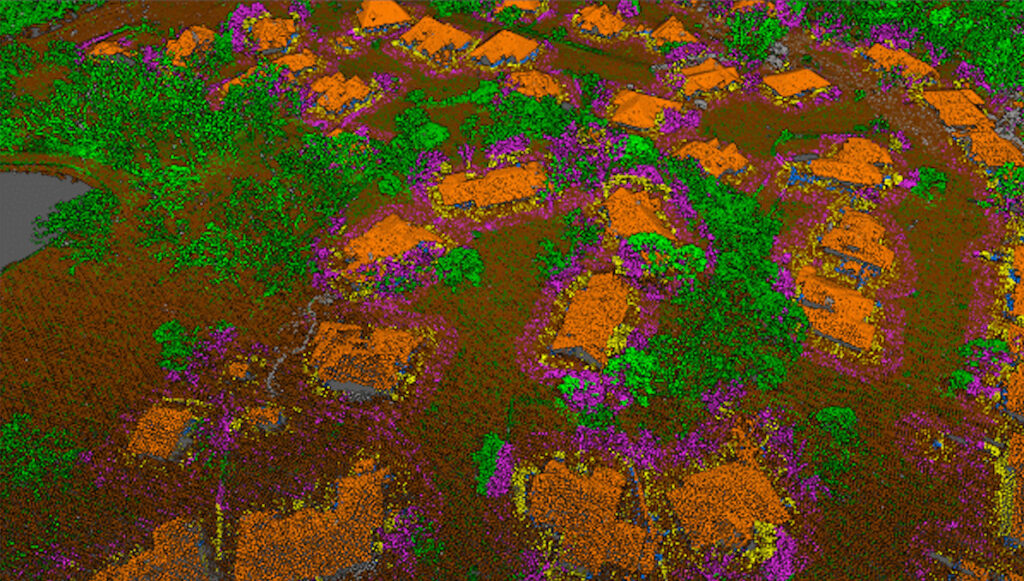
Machine learning and artificial intelligence algorithms may be used to provide object detection and classification. Automated feature detection can classify a wide range of objects such as vehicles, roads, powerlines and different types of vegetation.
A range of advanced features can be provided such as the ability to remove moving objects from the dataset, and to remove outliers caused by noise or reflection. If the LiDAR data was captured by a platform that used an RGB camera in conjunction with the laser scanner, it may be able to apply colours and textures based on the data captured in the RGB photos.

YellowScan CloudStation LiDAR Software
LiDAR software may be provided as a package that can be used offline on a desktop computer, or as a cloud-based service that allows users to upload data to a remote server to be processed. Cloud-based LiDAR processing software provides more flexibility and allows surveyors to work from anywhere, but will require a fast internet connection, as LiDAR scans typically generate a lot of data which can be slow to upload.

 Searching Companies & Products
Searching Companies & Products

 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.