Attitude and Heading Reference Systems (AHRS) for drones and unmanned systems support stable airborne behavior, precise control authority, and dependable heading data across complex mission conditions.
This category outlines leading suppliers of AHRS for UAV, UGV, ROV, and UUV navigation and stabilization, providing orientation solutions engineered to maintain reliable attitude data, stable heading output, and consistent control support across varied mission profiles.
If you design, build or supply Attitude and Heading Reference Systems (AHRS), create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
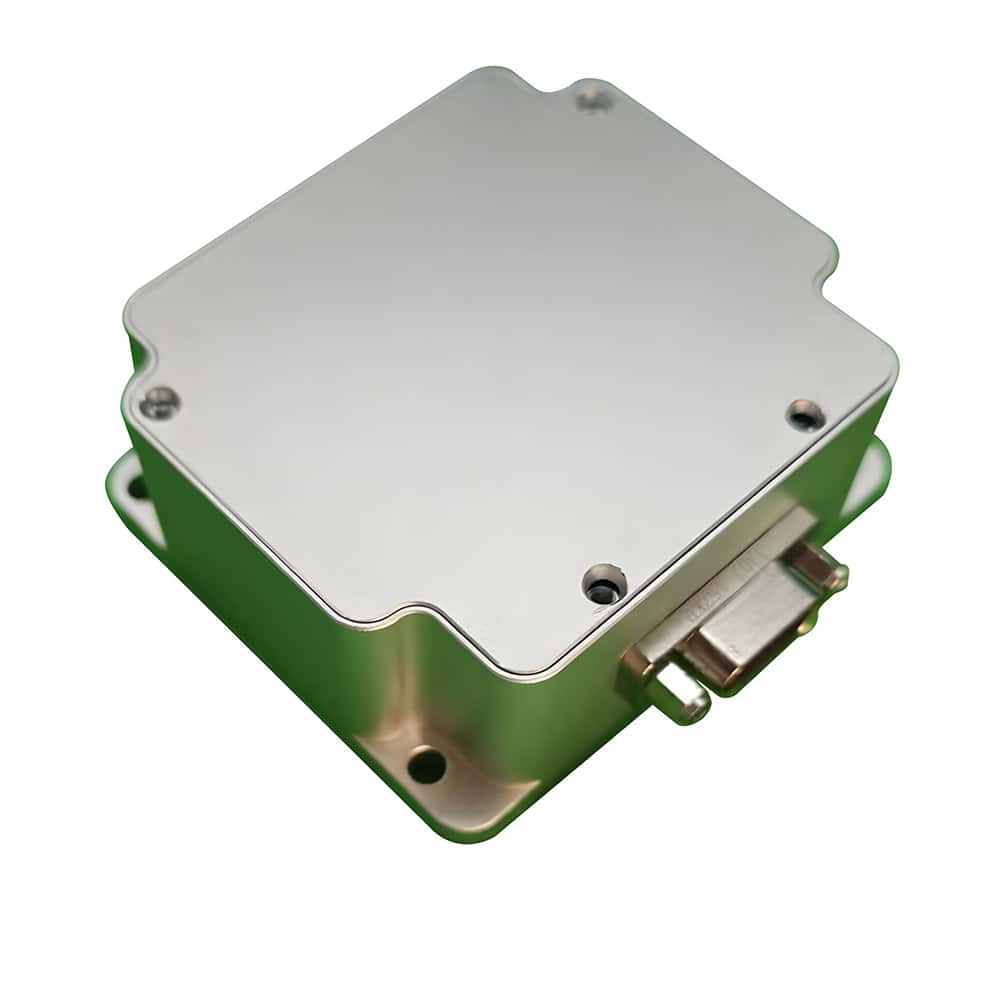
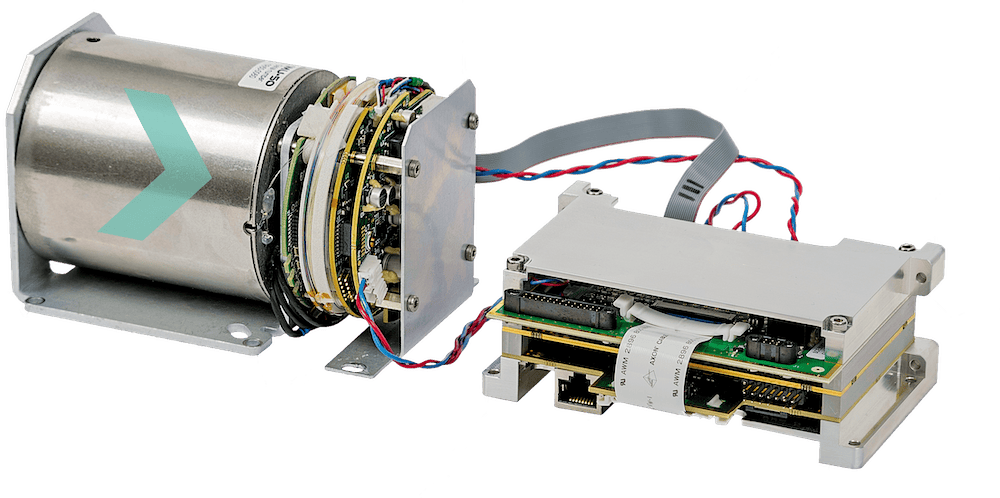
Compact FOG-based AHRS & INS with north-seeking gyrocompass
Compact FOG-based AHRS & INS with north-seeking gyrocompass
...act and rugged Attitude and HeadingReferenceSystem(AHRS) and Inertial Navigation System (INS)... ......uidance, and control systems, as well as mining equipment alignment and marine ROV/AUV...
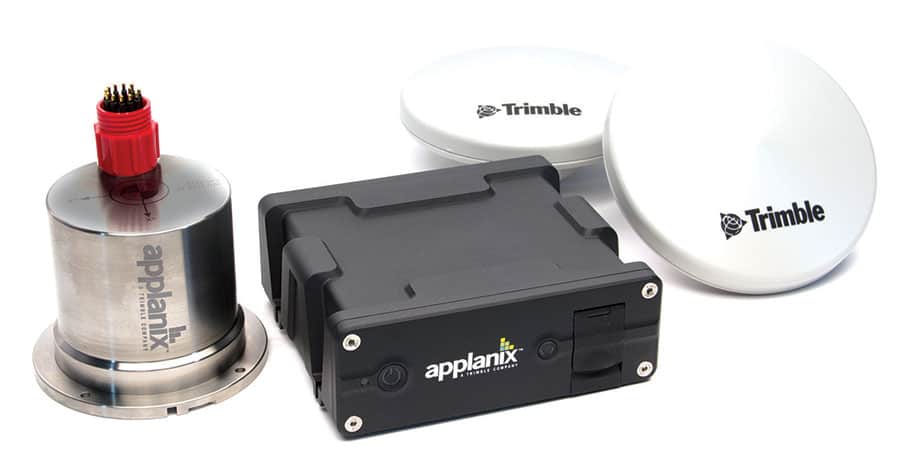
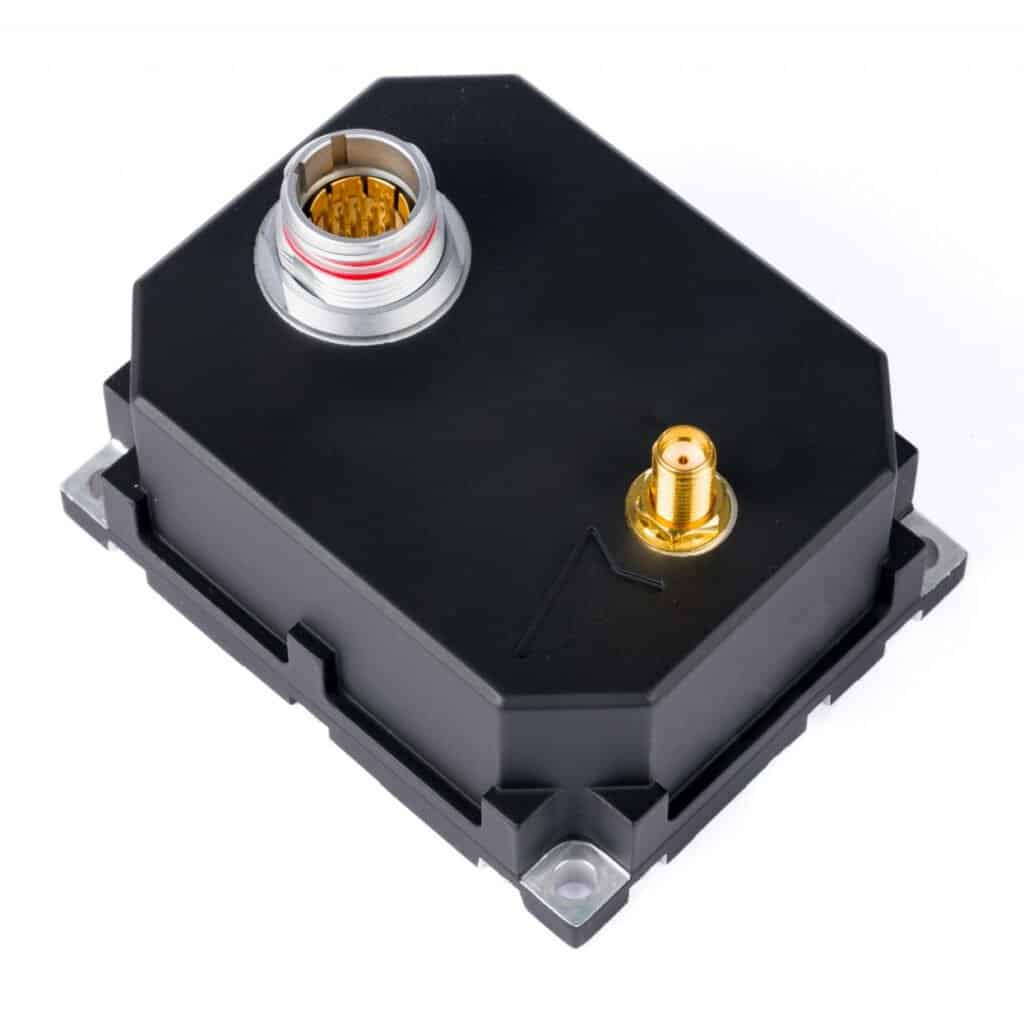
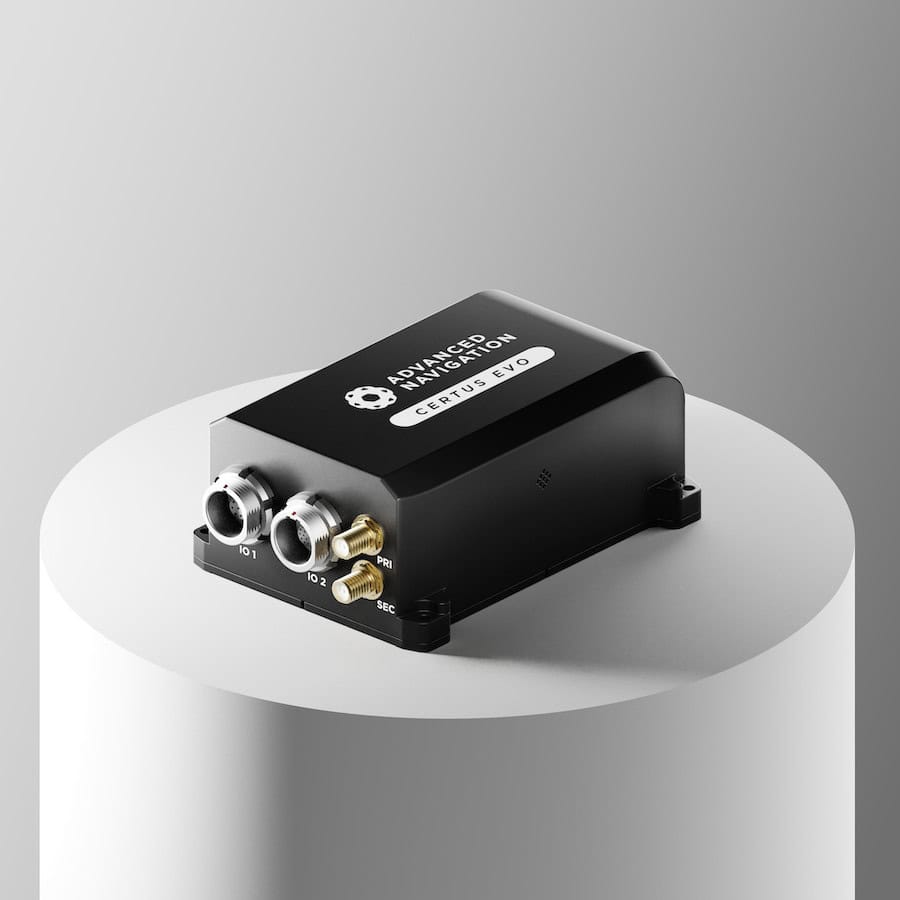
Marine positioning, heading & attitude measurement system for USVs & remote sensing platforms
Marine positioning, heading & attitude measurement system for USVs & remote sensing platforms
...racy position, heading,attitude, heave, and velocity data for USVs (uncrewed surface vessels) and... ...ultibeam sonar systems, enabling adherence to IHO standards on sonar swath widths of greater than ±...
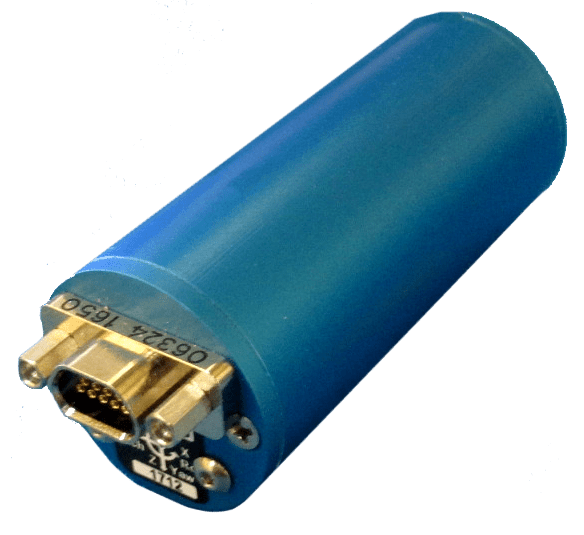
Compact OEM gyrocompass & attitude sensor for subsea navigation
Compact OEM gyrocompass & attitude sensor for subsea navigation
...yrocompass and attitude sensor from Exail designed for subsea navigation and orientation... ...on into subsea systems. Its compact OEM design supports high-reliability operation with minimal...
...echnology, the system provides accurate real-time heading, roll, pitch, heave, acceleration, and... ...interface. The system can also be upgraded through software to full Inertial Navigation System (INS)...
Survey-grade gyrocompass & motion sensor for marine navigation & stabilization
Survey-grade gyrocompass & motion sensor for marine navigation & stabilization
...the all-in-one system delivers highly accurate heading, roll, pitch, heave, surge, and sway data for... ...complex marine systems. Certified to IMO and IMO-HSC standards, the unit provides dependable...
High-accuracy heading, pitch & roll data for static & dynamic applications
High-accuracy heading, pitch & roll data for static & dynamic applications
Inertial Labs Attitude and HeadingReferenceSystem,AHRS-10 is a high-performance strapdown system... ...entation data (heading, pitch and roll) for both motionless and dynamic applications, as well as...
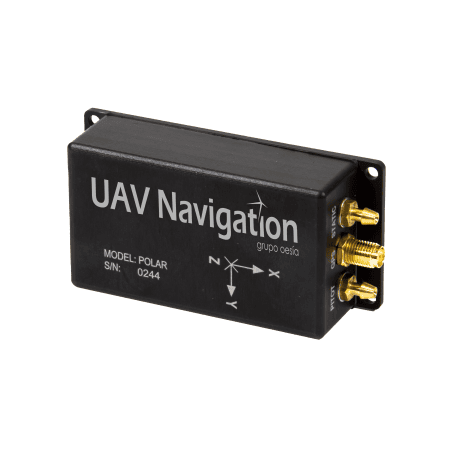
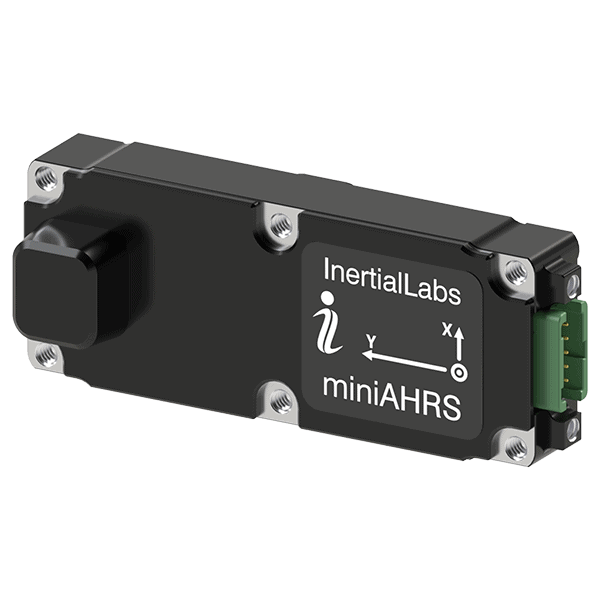
Miniature low-SWaP AHRS for air, sea and land applications
Miniature low-SWaP AHRS for air, sea and land applications
...ht and compact attitude and heading solution that combines three axes of precision accelerometers,... ...de an accurate reference to North. It remains the most reliable magnetic sensor technology for...
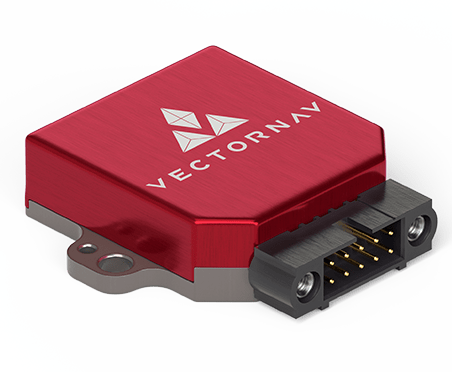
MEMS-based INS & inertial sensors for UAVs & unmanned systems
MEMS-based INS & inertial sensors for UAVs & unmanned systems
Aeron Systems, represented by UAV Propulsion Tech, produces proven MEMS-based inertial sensing... ...cise position, attitude and orientation information, with a multi-mode Kalman filter that makes it...
Introduction to Attitude & Heading Reference Systems (AHRS) for Unmanned Systems
Ellipse-A AHRS by SBG Systems
An Attitude and Heading Reference System (AHRS) provides continuous, high-integrity information about a platform’s orientation. It calculates roll, pitch, and yaw by blending multiple sensor measurements into a stable reference frame. This output is critical, supporting everything from high-rate autopilot loops in an Unmanned Aerial Vehicle (UAV) to high-precision payload stabilization on a Remotely Operated Vehicle (ROV).
For virtually all unmanned systems, the AHRS is the primary source of attitude data used by the flight computer, drive controller, or navigation system. Stable attitude information is foundational for maintaining control authority, enabling complex autonomous behavior, and ensuring predictable response in highly dynamic operating environments.
Comparison of AHRS, IMUs, and INS
While these terms are often used interchangeably, they represent distinct levels of sensor processing for the engineering professional:
Integrates IMU data to calculate position and velocity.
Position, Velocity, and Attitude.
Performs full position and velocity integration, requiring frequent correction from external navigation sources (like GNSS) to prevent unbounded drift.
3DM-CV7-AHRS Attitude Heading Reference System from Microstrain by HBK
An AHRS effectively acts as a constrained estimator, leveraging gravity (for pitch/roll) and the Earth’s magnetic field or other non-inertial sources (for heading) to prevent the unbounded position/velocity drift inherent to an INS. This makes them perfectly suited to unmanned vehicles and stabilized payloads that already rely on external navigation sources, such as GNSS or acoustic positioning, for position fixes.
Key Features of Modern Attitude & Heading Reference Systems
Hybrid INS/AHRS and GNSS Aiding
The convergence of inertial and navigation technology has led to highly robust solutions. Hybrid units combine the AHRS’s constrained estimation with sophisticated GNSS aiding:
Dual-Antenna GNSS: Used to provide a highly accurate, initial heading reference that is unaffected by magnetic interference.
RTK/PPK Kinematic Corrections: These high-accuracy GNSS techniques can be leveraged to refine attitude estimates, particularly in high-dynamic maneuvers, ensuring a highly stable reference frame.
These architectures bridge the performance gap between a traditional AHRS and a full, high-end INS, offering stable performance even during aggressive motion or in magnetically degraded areas.
Miniaturized High-Performance MEMS
Continuous improvements in MEMS (Micro-Electro-Mechanical Systems) inertial sensors are dramatically closing the gap with much larger, tactical-grade systems. Advancements in noise density and bias stability allow very small, SWaP-optimized AHRS units to deliver performance suitable for demanding UAV or ROV missions, broadening the capabilities of smaller, size-constrained unmanned platforms.
Robustness for GNSS-Denied Operation
As missions increasingly take place in GNSS-challenged environments (subsea, urban canyons, or electronic warfare zones), AHRS systems are integrating more tightly with advanced inertial and velocity-aiding algorithms. This allows them to extend operational robustness and maintain a high-integrity orientation estimate where external satellite navigation is unavailable. The next generation of systems will continue to tie closely into onboard autonomy frameworks, enabling faster, more reliable decision-making and precise control in the most complex mission scenarios.
UAV AHRS Architecture & Operating Principles
Modern attitude and heading reference systems for UAVs rely on a triaxial arrangement of inertial sensors and magnetometers:
Gyroscopes: These provide short-term angular rate information, measuring rotational speed along the X, Y, and Z axes. Their data is essential for rapid responsiveness to platform movement.
Accelerometers: These sense linear acceleration and, crucially, the Earth’s gravitational vector. Gravity acts as the long-term, stable reference for the filter to determine pitch and roll.
Magnetometers: These reference the Earth’s magnetic field for determining heading (yaw). System performance varies widely; engineers must weigh SWaP (Size, Weight, and Power) concerns for small UAS against the demanding low drift and noise characteristics required for high-end marine or defense-grade units.
Signal Processing and Sensor Fusion Algorithms
Raw inertial data is inherently noisy and subject to bias, thermal variation, and cross-axis coupling. Before this data is usable, it undergoes sophisticated signal conditioning. The real magic happens in the sensor fusion layer, which combines these disparate measurements into a single, coherent orientation estimate. This process is designed to compensate for transient forces, leverage gravity for stability, and manage heading updates from the magnetic field or other aiding sensors.
Kalman Filters, Machine Learning, and Estimation
POLAR-300 AHRS-IMU by UAV Navigation-Grupo Oesía
The foundation of high-performance attitude estimation remains the Extended or Unscented Kalman Filter (EKF/UKF). These probabilistic filters continuously reconcile the system’s predicted state with actual measured data, which effectively corrects accumulated drift and suppresses high-frequency noise.
Increasingly, manufacturers are integrating Machine Learning (ML) or other adaptive computational components. These are often used to address the most challenging aspects of AHRS performance:
Adaptive Noise Modeling: Detecting and characterizing abnormal sensor noise (e.g., from specific rotor frequencies).
Dynamic Bias Estimation: Real-time adaptation to temperature and vibration-induced bias changes.
Sensor Fault Detection: Identifying and isolating transient or permanent sensor failures.
These enhancements dramatically improve robustness, particularly for small unmanned platforms that frequently experience aggressive maneuvers and high vibration levels.
Managing Error Sources, Drift, and Compensation
For engineering teams, performance comes down to mitigating primary error sources: gyro drift, magnetic interference, thermal variation, and vibration.
Calibration: Factory calibration and thermal compensation tables are essential for mitigating initial sensor bias and thermal instability.
Magnetic Compensation: For unmanned marine and ground systems, where ferrous materials or local magnetic anomalies are common, advanced systems employ real-time adaptive magnetic modeling or, critically, switch to heading-free mode aided by external navigation sources like a Doppler Velocity Log (DVL) or a dual-antenna GNSS system.
Bias Estimation: The Kalman filter’s ability to estimate and remove gyro bias in real-time is the primary technique for managing long-term attitude drift.
Applications of AHRS in Unmanned Systems
UAV Flight Control and Navigation Stability
The attitude and heading reference system is the nervous system for a UAV. Multirotor aircraft rely on high-rate, low-latency attitude feedback to manage thrust vectoring and maintain level flight. Fixed-wing and VTOL systems use AHRS data to stabilize their flight paths, manage dynamic transitions, and improve georeferencing for crucial ISR (Intelligence, Surveillance, and Reconnaissance) payloads. Precise attitude data is also key to effective wind compensation during autonomous navigation.
UGV Mobility and Terrain Handling
For ground robots, consistent attitude information supports traction control, allowing the vehicle to accurately assess and safely manage slope angles. Orientation data is also essential for navigation systems to correctly interpret wheel odometry and maintain situational awareness on uneven or challenging terrain. Any stabilized turret or advanced sensor on a UGV relies on the AHRS for accurate pointing, ensuring target lock remains stable despite platform motion.
ROV and USV Marine Vehicle Pose Estimation
Marine environments present unique dynamics. ROVs and Unmanned Surface Vehicles (USVs) experience continuous wave-induced motion that must be filtered out to produce usable attitude estimates. The most significant engineering challenge is the frequent degradation of magnetometer performance due to ferrous ship structures, motors, and subsea infrastructure. High-performance marine AHRS units therefore prioritize exceptional gyro performance and often integrate with acoustic or Doppler systems to provide stable, reliable heading in magnetically-challenging waters.
AHRS for Stabilized Drone Payloads & UAV Sensor Platforms
Gimbal and EO/IR Sensor Stabilization
Gimbal systems require high-rate, ultra-low-latency attitude and rate feedback to maintain a stable line of sight while the host platform moves aggressively. The attitude and heading reference system provides the absolute orientation and rate data needed to counteract platform motion, stabilizing optical or infrared cameras used for surveillance, inspection, or targeting. This is particularly crucial for smaller UAS where high-frequency vibrations are a constant factor.
Antenna Pointing and Communications
High-gain antennas used for communication links or radar payloads must maintain highly precise pointing accuracy. Whether on a fixed-wing UAV or a maritime vessel, the AHRS allows the control system to maintain a line of sight regardless of vehicle motion, ensuring stable links for directional datalinks, phased arrays, and SATCOM terminals.
Integration & Interfacing Considerations
Effective integration requires careful selection of interface standards and synchronization protocols:
Data Interfaces: While older or specialized military platforms may use ARINC or MIL-STD-1553, the vast majority of modern commercial and industrial UAS architectures rely on CAN (Controller Area Network) for its reliability and deterministic characteristics, and Ethernet (increasingly with TSN capabilities) for high-bandwidth data logging and centralized processing. UART remains common for low-SWaP micro-UAS.
Time Synchronization: Accurate time alignment between the AHRS, GNSS receiver, and mission computer is critical for precise georeferencing. Methods like PPS (Pulse Per Second) synchronization or network time protocols ensure data is stamped accurately, minimizing errors in position and attitude correlation.
Software Integration: Modern autopilots and control systems favor standardized messaging protocols like MAVLink or ROS messages. AHRS suppliers providing robust APIs and well-structured drivers significantly reduce the overall integration time and risk for system integrators.
Inertial Labs unveils IRINS LEO-aided inertial navigation system integrating inertial navigation, altitude and heading reference, and resilient timing for assured positioning across land, air and sea in denied environments
Aegiverse’s AR-3A-EC FOG AHRS is a compact, high-accuracy unit, combining MEMS gyros, a closed-loop fiber optic gyro, and a three-axis accelerometer, supported by AI-based algorithms for automatic attitude stabilization and inertial positioning in small-to-medium unmanned vehicles
In this Q&A, Dr. Uwe Herberth, Chief Technology Officer at LITEF, shares how MEMS, FOG, and hybrid navigation innovations enhance UAV accuracy, resilience, and certification readiness
Advanced Navigation outlines how cost-effective all-band GNSS/INS improves positioning reliability, enhances fleet efficiency, and reduces dependence on traditional RTK infrastructure in mining operations
Advanced Navigation demonstrates its recent flight trials using a Mooney 201 aircraft, where fusing its Boreas D90 FOG INS with an LVS and its Certus Evo MEMS INS with an ADU enabled precise, reliable navigation in GPS-denied environments
Aegiverse is advancing fiber optic gyro technology with compact, high-precision inertial sensors designed for integration into a wide range of unmanned platforms
ARK Electronics’ optical flow and distance sensors provide reliable navigation and positioning data for UAVs, ensuring flight stability and control in GNSS-denied environments
SBG Systems is joining hundreds of industry experts and government agencies gathering to evaluate positioning and navigation technologies against jamming and spoofing in a controlled, real-world environment
Sep 18, 2025
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.