Les systèmes de référence d'attitude et de cap (AHRS) pour les drones et les systèmes sans pilote favorisent un comportement aérien stable, un contrôle précis et des données de cap fiables dans des conditions de mission complexes.
Cette catégorie présente les principaux fournisseurs d'AHRS pour la navigation et la stabilisation des UAV, UGV, ROV et UUV, offrant des solutions d'orientation conçues pour maintenir des données d'attitude fiables, un cap stable et un contrôle constant dans divers profils de mission.
Solutions matérielles pour drones : systèmes de propulsion et de carburant, servomoteurs et contrôleurs de vol, solutions d'imagerie, lanceurs et parachutes
Si vous concevez, construisez ou fournissez Systèmes de référence d’attitude et de cap (AHRS), Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Introduction aux systèmes de référence d’attitude et de cap (AHRS) pour les systèmes sans pilote
AHRS Ellipse-A par SBG Systems
Un système de référence d’attitude et de cap (AHRS) fournit des informations continues et hautement fiables sur l’orientation d’une plateforme. Il calcule le roulis, le tangage et le lacet en combinant les mesures de plusieurs capteurs dans un cadre de référence stable. Ces données sont essentielles, car elles prennent en charge tout, des boucles de pilotage automatique à haut débit dans un véhicule aérien sans pilote (UAV) à la stabilisation de haute précision de la charge utile sur un véhicule télécommandé (ROV).
Pour pratiquement tous les systèmes sans pilote, l’AHRS est la principale source de données d’attitude utilisée par l’ordinateur de vol, le contrôleur d’entraînement ou le système de navigation. Des informations d’attitude stables sont essentielles pour maintenir l’autorité de contrôle, permettre un comportement autonome complexe et garantir une réponse prévisible dans des environnements d’exploitation très dynamiques.
Comparaison entre l’AHRS, les IMU et l’INS
Bien que ces termes soient souvent utilisés de manière interchangeable, ils représentent des niveaux distincts de traitement des capteurs pour les professionnels de l’ingénierie :
Intègre les données IMU pour calculer la position et la vitesse.
Position, vitesse et attitude.
Effectue une intégration complète de la position et de la vitesse, nécessitant des corrections fréquentes à partir de sources de navigation externes (comme le GNSS) pour éviter une dérive illimitée.
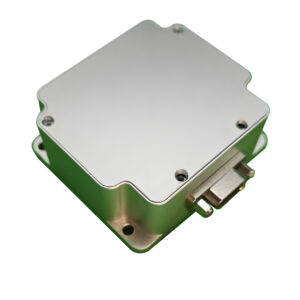
Système de référence d’attitude et de cap 3DM-CV7-AHRS de Microstrain by HBK
Un AHRS agit efficacement comme un estimateur contraint, exploitant la gravité (pour le tangage/roulis) et le champ magnétique terrestre ou d’autres sources non inertielles (pour le cap) afin d’empêcher la dérive illimitée de position/vitesse inhérente à un INS. Cela les rend parfaitement adaptés aux véhicules sans pilote et aux charges utiles stabilisées qui dépendent déjà de sources de navigation externes, telles que le GNSS ou le positionnement acoustique, pour la détermination de leur position.
Principales caractéristiques des systèmes modernes de référence d’attitude et de cap
Aide hybride INS/AHRS et GNSS
La convergence des technologies inertielle et de navigation a donné naissance à des solutions très robustes. Les unités hybrides combinent l’estimation contrainte de l’AHRS avec une aide GNSS sophistiquée :
GNSS à double antenne : utilisé pour fournir une référence de cap initiale très précise, qui n’est pas affectée par les interférences magnétiques.
Corrections cinématiques RTK/PPK : ces techniques GNSS de haute précision peuvent être utilisées pour affiner les estimations d’attitude, en particulier lors de manœuvres très dynamiques, garantissant ainsi un cadre de référence très stable.
Ces architectures comblent l’écart de performance entre un AHRS traditionnel et un INS haut de gamme complet, offrant des performances stables même lors de mouvements agressifs ou dans des zones où le champ magnétique est dégradé.
MEMS miniaturisés haute performance
Les améliorations continues apportées aux capteurs inertiels MEMS (systèmes micro-électromécaniques) comblent considérablement l’écart avec les systèmes tactiques beaucoup plus grands. Les progrès réalisés en matière de densité de bruit et de stabilité de biais permettent à des unités AHRS très petites et optimisées en termes de SWaP d’offrir des performances adaptées aux missions exigeantes des drones ou des ROV, élargissant ainsi les capacités des plates-formes sans pilote plus petites et soumises à des contraintes de taille.
Robustesse pour un fonctionnement sans GNSS
Les missions se déroulant de plus en plus souvent dans des environnements où le GNSS est difficile à utiliser (sous-marin, canyons urbains ou zones de guerre électronique), les systèmes AHRS s’intègrent de manière plus étroite à des algorithmes inertiels et d’aide à la vitesse avancés. Cela leur permet d’étendre leur robustesse opérationnelle et de maintenir une estimation d’orientation à haute intégrité lorsque la navigation par satellite externe n’est pas disponible. La prochaine génération de systèmes continuera à s’intégrer étroitement aux cadres d’autonomie embarqués, permettant une prise de décision plus rapide et plus fiable ainsi qu’un contrôle précis dans les scénarios de mission les plus complexes.
Architecture et principes de fonctionnement des AHRS pour drones
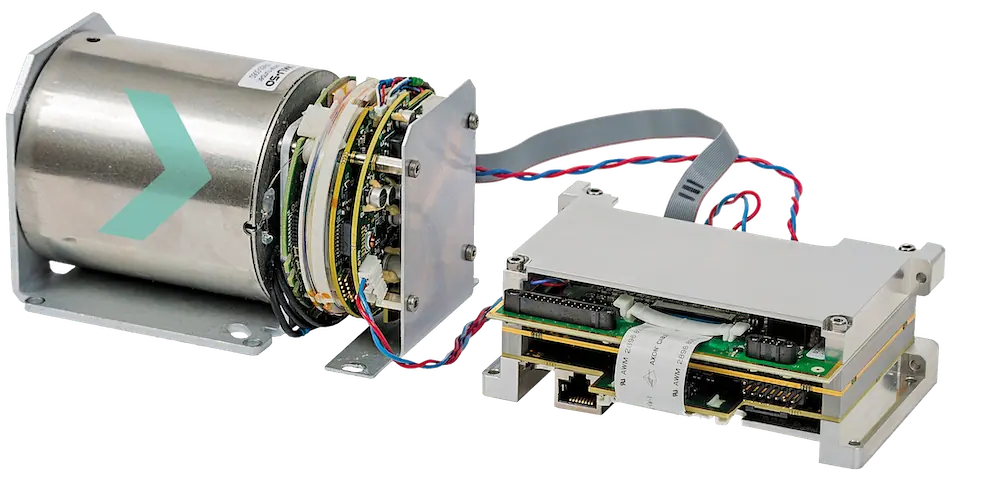
Les systèmes modernes de référence d’attitude et de cap pour les drones reposent sur une disposition triaxiale de capteurs inertiels et de magnétomètres :
Gyroscopes : ils fournissent des informations sur la vitesse angulaire à court terme, en mesurant la vitesse de rotation le long des axes X, Y et Z. Leurs données sont essentielles pour réagir rapidement aux mouvements de la plate-forme.
Accéléromètres : ils détectent l’accélération linéaire et, surtout, le vecteur gravitationnel de la Terre. La gravité sert de référence stable à long terme au filtre pour déterminer le tangage et le roulis.
Magnétomètres : ils se réfèrent au champ magnétique terrestre pour déterminer le cap (lacet). Les performances du système varient considérablement ; les ingénieurs doivent trouver un équilibre entre les contraintes SWaP (taille, poids et puissance) des petits drones et les caractéristiques exigeantes en matière de faible dérive et de bruit requises pour les unités maritimes ou militaires haut de gamme.
Algorithmes de traitement du signal et de fusion des capteurs
Les données inertielles brutes sont intrinsèquement bruitées et sujettes à des biais, des variations thermiques et des couplages entre axes. Avant de pouvoir être utilisées, ces données sont soumises à un conditionnement sophistiqué. La véritable magie opère au niveau de la couche de fusion des capteurs, qui combine ces mesures disparates en une seule estimation cohérente de l’orientation. Ce processus est conçu pour compenser les forces transitoires, tirer parti de la gravité pour assurer la stabilité et gérer les mises à jour du cap à partir du champ magnétique ou d’autres capteurs auxiliaires.
Filtres de Kalman, apprentissage automatique et estimation
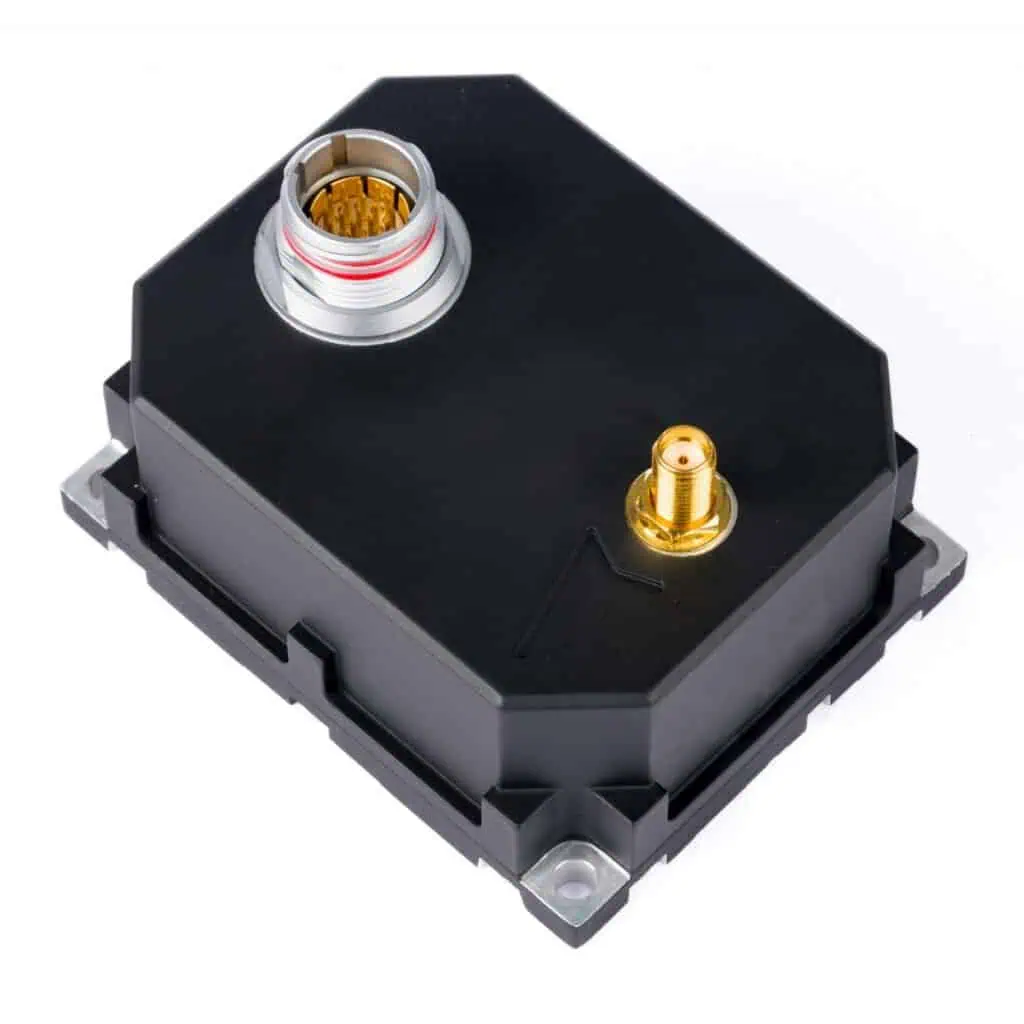
POLAR-300 AHRS-IMU par UAV Navigation-Grupo Oesía
Le filtre de Kalman étendu ou non parfumé (EKF/UKF) reste à la base de l’estimation haute performance de l’attitude. Ces filtres probabilistes réconcilient en permanence l’état prévu du système avec les données réelles mesurées, ce qui corrige efficacement la dérive accumulée et supprime le bruit à haute fréquence.
De plus en plus, les fabricants intègrent l’apprentissage automatique (ML) ou d’autres composants informatiques adaptatifs. Ceux-ci sont souvent utilisés pour traiter les aspects les plus complexes des performances AHRS :
Modélisation adaptative du bruit : détection et caractérisation des bruits anormaux des capteurs (par exemple, provenant de fréquences spécifiques du rotor).
Estimation dynamique du biais : adaptation en temps réel aux changements de biais induits par la température et les vibrations.
Détection des défaillances des capteurs : identification et isolation des défaillances transitoires ou permanentes des capteurs.
Ces améliorations renforcent considérablement la robustesse, en particulier pour les petites plateformes sans pilote qui sont fréquemment soumises à des manœuvres agressives et à des niveaux de vibration élevés.
Gestion des sources d’erreur, de la dérive et de la compensation
Pour les équipes d’ingénieurs, la performance repose sur l’atténuation des principales sources d’erreur : dérive gyroscopique, interférences magnétiques, variations thermiques et vibrations.
Étalonnage : l’étalonnage en usine et les tables de compensation thermique sont essentiels pour atténuer le biais initial des capteurs et l’instabilité thermique.
Compensation magnétique : pour les systèmes maritimes et terrestres sans pilote, où les matériaux ferreux ou les anomalies magnétiques locales sont courants, les systèmes avancés utilisent une modélisation magnétique adaptative en temps réel ou, de manière critique, passent en mode sans cap à l’aide de sources de navigation externes telles qu’un loch Doppler (DVL) ou un système GNSS à double antenne.
Estimation du biais : La capacité du filtre de Kalman à estimer et à supprimer le biais du gyroscope en temps réel est la principale technique utilisée pour gérer la dérive d’attitude à long terme.
Applications de l’AHRS dans les systèmes sans pilote
Contrôle de vol et stabilité de navigation des drones
Le système de référence d’attitude et de cap est le système nerveux d’un drone. Les aéronefs multirotors s’appuient sur un retour d’information sur l’attitude à haut débit et à faible latence pour gérer la poussée vectorielle et maintenir un vol en palier. Les systèmes à voilure fixe et VTOL utilisent les données AHRS pour stabiliser leurs trajectoires de vol, gérer les transitions dynamiques et améliorer le géoréférencement pour les charges utiles ISR (renseignement, surveillance et reconnaissance) cruciales. Des données d’attitude précises sont également essentielles pour une compensation efficace du vent pendant la navigation autonome.
Mobilité et gestion du terrain des véhicules terrestres sans pilote (UGV)
Pour les robots terrestres, des informations d’attitude cohérentes facilitent le contrôle de la traction, permettant au véhicule d’évaluer avec précision et de gérer en toute sécurité les angles de pente. Les données d’orientation sont également essentielles pour que les systèmes de navigation interprètent correctement l’odométrie des roues et maintiennent une bonne perception de la situation sur des terrains accidentés ou difficiles. Toute tourelle stabilisée ou tout capteur avancé sur un UGV s’appuie sur l’AHRS pour un pointage précis, garantissant que le verrouillage de la cible reste stable malgré les mouvements de la plate-forme.
Estimation de la position des véhicules marins ROV et USV
Les environnements marins présentent une dynamique unique. Les ROV et les véhicules de surface sans pilote (USV) subissent des mouvements continus induits par les vagues qui doivent être filtrés pour produire des estimations d’attitude utilisables. Le défi technique le plus important est la dégradation fréquente des performances des magnétomètres due aux structures ferreuses des navires, aux moteurs et aux infrastructures sous-marines. Les unités AHRS marines haute performance privilégient donc des performances gyroscopiques exceptionnelles et s’intègrent souvent à des systèmes acoustiques ou Doppler afin de fournir un cap stable et fiable dans les eaux difficiles sur le plan magnétique.
AHRS pour les charges utiles stabilisées des drones et les plates-formes de capteurs UAV
Stabilisation des cardans et des capteurs EO/IR
Les systèmes à cardan nécessitent un retour d’information à haut débit et à très faible latence sur l’attitude et la vitesse afin de maintenir une ligne de visée stable lorsque la plate-forme hôte se déplace de manière agressive. Le système de référence d’attitude et de cap fournit les données d’orientation et de vitesse absolues nécessaires pour contrebalancer les mouvements de la plate-forme, stabilisant ainsi les caméras optiques ou infrarouges utilisées pour la surveillance, l’inspection ou le ciblage. Cela est particulièrement crucial pour les petits UAS où les vibrations à haute fréquence sont un facteur constant.
Orientation des antennes et communications
Les antennes à gain élevé utilisées pour les liaisons de communication ou les charges utiles radar doivent maintenir une précision d’orientation très élevée. Que ce soit sur un drone à voilure fixe ou un navire maritime, l’AHRS permet au système de contrôle de maintenir une ligne de visée indépendamment du mouvement du véhicule, garantissant ainsi des liaisons stables pour les liaisons de données directionnelles, les réseaux phasés et les terminaux SATCOM.
Considérations relatives à l’intégration et à l’interfaçage
Une intégration efficace nécessite une sélection minutieuse des normes d’interface et des protocoles de synchronisation :
Interfaces de données : Alors que les plateformes militaires plus anciennes ou spécialisées peuvent utiliser ARINC ou MIL-STD-1553, la grande majorité des architectures UAS commerciales et industrielles modernes s’appuient sur le CAN (Controller Area Network) pour sa fiabilité et ses caractéristiques déterministes, et sur Ethernet (de plus en plus avec des capacités TSN) pour l’enregistrement de données à haut débit et le traitement centralisé. L’UART reste courant pour les micro-UAS à faible SWaP.
Synchronisation temporelle : Un alignement temporel précis entre l’AHRS, le récepteur GNSS et l’ordinateur de mission est essentiel pour un géoréférencement précis. Des méthodes telles que la synchronisation PPS (Pulse Per Second) ou les protocoles de temps réseau garantissent l’horodatage précis des données, minimisant ainsi les erreurs de corrélation de position et d’attitude.
Intégration logicielle : Les pilotes automatiques et les systèmes de contrôle modernes privilégient les protocoles de messagerie standardisés tels que MAVLink ou ROS. Les fournisseurs d’AHRS proposant des API robustes et des pilotes bien structurés réduisent considérablement le temps d’intégration global et les risques pour les intégrateurs de systèmes.
Inertial Labs dévoile le système de navigation inertielle assistée IRINS LEO, qui intègre la navigation inertielle, la référence d'altitude et de cap, ainsi qu'une synchronisation stable pour un positionnement assuré sur terre, dans l'air et en mer, dans des environnements hostiles