Lage- und Kursreferenzsysteme (AHRS) für Drohnen und unbemannte Systeme unterstützen ein stabiles Flugverhalten, eine präzise Steuerungsautorität und zuverlässige Kursdaten unter komplexen Einsatzbedingungen.
Diese Kategorie umfasst führende Anbieter von AHRS für die Navigation und Stabilisierung von UAV, UGV, ROV und UUV und bietet Orientierungslösungen, die für zuverlässige Lagedaten, stabile Kursausgabe und konsistente Steuerungsunterstützung bei unterschiedlichen Einsatzprofilen entwickelt wurden.
Wenn Sie entwerfen, bauen oder liefern Lage- und Kursreferenzsysteme (AHRS), Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
Einführung in Lage- und Kursreferenzsysteme (AHRS) für unbemannte Systeme
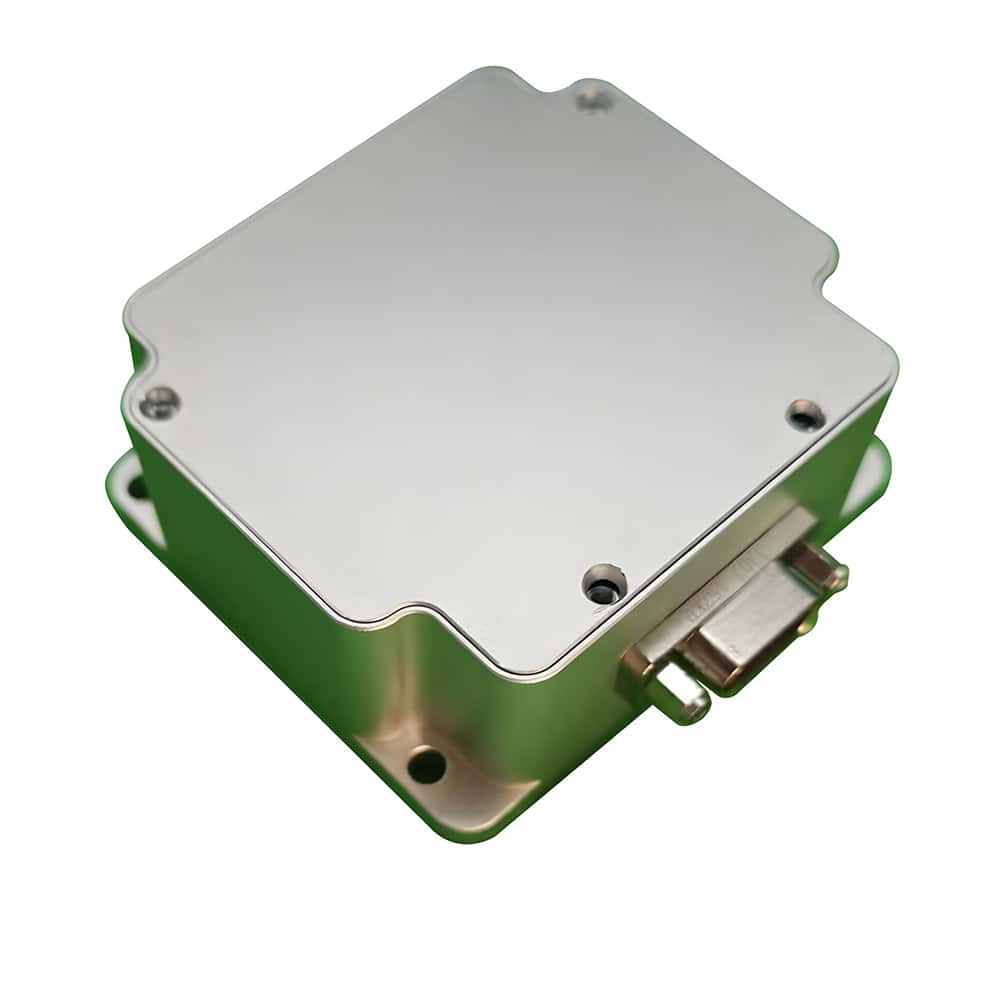
Ellipse-A AHRS von SBG Systems
Ein Lage- und Kursreferenzsystem (AHRS) liefert kontinuierlich hochintegrierte Informationen über die Ausrichtung einer Plattform. Es berechnet Roll-, Nick- und Gierbewegungen, indem es mehrere Sensormessungen zu einem stabilen Referenzrahmen zusammenführt. Diese Ausgabe ist von entscheidender Bedeutung und unterstützt alles von Hochgeschwindigkeits-Autopilot-Regelkreisen in einem unbemannten Luftfahrzeug (UAV) bis hin zur hochpräzisen Nutzlaststabilisierung in einem ferngesteuerten Unterwasserfahrzeug (ROV).
Bei praktisch allen unbemannten Systemen ist das AHRS die primäre Quelle für Lageinformationen, die vom Flugcomputer, Antriebsregler oder Navigationssystem verwendet werden. Stabile Lageinformationen sind grundlegend für die Aufrechterhaltung der Kontrollbefugnis, ermöglichen komplexes autonomes Verhalten und gewährleisten vorhersehbare Reaktionen in hochdynamischen Betriebsumgebungen.
Vergleich von AHRS, IMUs und INS
Obwohl diese Begriffe oft synonym verwendet werden, stellen sie für Ingenieure unterschiedliche Ebenen der Sensorverarbeitung dar:
Integriert IMU-Daten zur Berechnung von Position und Geschwindigkeit.
Position, Geschwindigkeit und Lage.
Führt eine vollständige Positions- und Geschwindigkeitsintegration durch, erfordert jedoch häufige Korrekturen durch externe Navigationsquellen (wie GNSS), um eine unbegrenzte Drift zu verhindern.
3DM-CV7-AHRS Lage- und Kursreferenzsystem von Microstrain by HBK
Ein AHRS fungiert effektiv als eingeschränkter Schätzer, der die Schwerkraft (für Neigung/Rollbewegung) und das Erdmagnetfeld oder andere nicht-inertiale Quellen (für die Kursbestimmung) nutzt, um die einem INS inhärente unbegrenzte Positions-/Geschwindigkeitsdrift zu verhindern. Dadurch eignen sie sich perfekt für unbemannte Fahrzeuge und stabilisierte Nutzlasten, die bereits auf externe Navigationsquellen wie GNSS oder akustische Positionierung für die Positionsbestimmung angewiesen sind.
Wichtige Merkmale moderner Lage- und Kursreferenzsysteme
Hybrides INS/AHRS und GNSS-Unterstützung
Die Konvergenz von Trägheits- und Navigationstechnologie hat zu äußerst robusten Lösungen geführt. Hybride Geräte kombinieren die eingeschränkte Schätzung des AHRS mit einer ausgeklügelten GNSS-Unterstützung:
GNSS mit zwei Antennen: Wird verwendet, um eine hochgenaue, anfängliche Kursreferenz zu liefern, die nicht durch magnetische Störungen beeinträchtigt wird.
RTK/PPK-kinematische Korrekturen: Diese hochgenauen GNSS-Techniken können zur Verfeinerung von Lageabschätzungen genutzt werden, insbesondere bei hochdynamischen Manövern, um einen hochstabilen Referenzrahmen zu gewährleisten.
Diese Architekturen schließen die Leistungslücke zwischen einem herkömmlichen AHRS und einem vollständigen High-End-INS und bieten selbst bei aggressiven Bewegungen oder in magnetisch beeinträchtigten Bereichen eine stabile Leistung.
Miniaturisierte Hochleistungs-MEMS
Kontinuierliche Verbesserungen bei MEMS-Trägheitssensoren (Micro-Electro-Mechanical Systems) schließen die Lücke zu viel größeren taktischen Systemen zunehmend. Fortschritte bei der Rauschdichte und Bias-Stabilität ermöglichen es sehr kleinen, SWaP-optimierten AHRS-Einheiten, eine Leistung zu liefern, die für anspruchsvolle UAV- oder ROV-Missionen geeignet ist, und erweitern damit die Fähigkeiten kleinerer, größenbeschränkter unbemannter Plattformen.
Robustheit für den Betrieb ohne GNSS
Da Missionen zunehmend in Umgebungen stattfinden, in denen GNSS nur eingeschränkt verfügbar ist (unter Wasser, in städtischen Schluchten oder in elektronischen Kriegsführungszonen), werden AHRS-Systeme immer enger mit fortschrittlichen Trägheits- und Geschwindigkeitsunterstützungsalgorithmen integriert. Dadurch können sie ihre Betriebsrobustheit erweitern und eine hochintegrierte Orientierungsschätzung aufrechterhalten, wenn keine externe Satellitennavigation verfügbar ist. Die nächste Generation von Systemen wird weiterhin eng mit den autonomen Rahmenwerken an Bord verbunden sein und so eine schnellere, zuverlässigere Entscheidungsfindung und präzise Steuerung in den komplexesten Missionsszenarien ermöglichen.
Architektur und Funktionsweise von UAV-AHRS-Systemen
Moderne Lage- und Kursreferenzsysteme für UAVs basieren auf einer dreiachsigen Anordnung von Trägheitssensoren und Magnetometern:
Gyroskope: Diese liefern kurzfristige Winkelgeschwindigkeitsinformationen und messen die Drehgeschwindigkeit entlang der X-, Y- und Z-Achse. Ihre Daten sind für eine schnelle Reaktion auf Plattformbewegungen unerlässlich.
Beschleunigungsmesser: Diese erfassen die lineare Beschleunigung und, was entscheidend ist, den Gravitationsvektor der Erde. Die Schwerkraft dient als langfristige, stabile Referenz für den Filter zur Bestimmung von Neigung und Rollbewegung.
Magnetometer: Diese beziehen sich auf das Magnetfeld der Erde, um die Richtung (Gierung) zu bestimmen. Die Systemleistung variiert stark; Ingenieure müssen SWaP-Aspekte (Größe, Gewicht und Leistung) für kleine UAS gegen die anspruchsvollen Anforderungen an geringe Drift und Rauscheigenschaften abwägen, die für hochwertige Marine- oder Verteidigungsgeräte erforderlich sind.
Signalverarbeitung und Sensorfusionsalgorithmen
Rohdaten von Trägheitsmessern sind von Natur aus verrauscht und unterliegen Verzerrungen, thermischen Schwankungen und Kreuzkopplungen. Bevor diese Daten verwendet werden können, werden sie einer komplexen Signalaufbereitung unterzogen. Die eigentliche Magie geschieht in der Sensorfusionsschicht, die diese unterschiedlichen Messungen zu einer einzigen, kohärenten Orientierungsschätzung kombiniert. Dieser Prozess dient dazu, vorübergehende Kräfte auszugleichen, die Schwerkraft für Stabilität zu nutzen und Kursaktualisierungen aus dem Magnetfeld oder anderen unterstützenden Sensoren zu verwalten.
Kalman-Filter, maschinelles Lernen und Schätzung
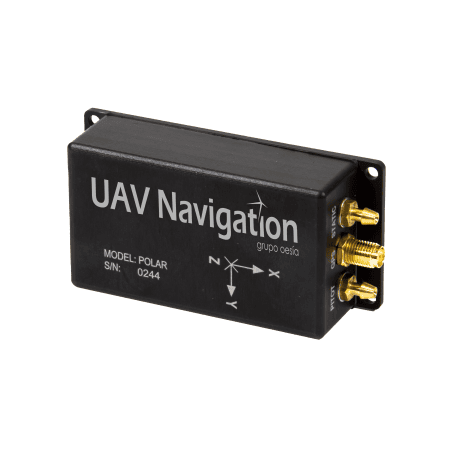
POLAR-300 AHRS-IMU von UAV Navigation-Grupo Oesía
Die Grundlage für eine leistungsstarke Lagebestimmung bildet nach wie vor der erweiterte oder unscented Kalman-Filter (EKF/UKF). Diese probabilistischen Filter gleichen den vom System vorhergesagten Zustand kontinuierlich mit den tatsächlich gemessenen Daten ab, wodurch akkumulierte Drift effektiv korrigiert und hochfrequente Störungen unterdrückt werden.
Zunehmend integrieren Hersteller maschinelles Lernen (ML) oder andere adaptive Berechnungskomponenten. Diese werden häufig eingesetzt, um die schwierigsten Aspekte der AHRS-Leistung anzugehen:
Adaptive Rauschmodellierung: Erkennung und Charakterisierung abnormaler Sensorgeräusche (z. B. von bestimmten Rotorfrequenzen).
Dynamische Bias-Schätzung: Echtzeitanpassung an temperatur- und vibrationsbedingte Bias-Änderungen.
Sensorfehlererkennung: Identifizierung und Isolierung vorübergehender oder dauerhafter Sensorausfälle.
Diese Verbesserungen erhöhen die Robustheit erheblich, insbesondere bei kleinen unbemannten Plattformen, die häufig aggressiven Manövern und hohen Vibrationspegeln ausgesetzt sind.
Verwaltung von Fehlerquellen, Drift und Kompensation
Für Ingenieurteams kommt es bei der Leistung darauf an, die primären Fehlerquellen zu minimieren: Gyro-Drift, magnetische Interferenzen, thermische Schwankungen und Vibrationen.
Kalibrierung: Werkskalibrierung und thermische Kompensationstabellen sind unerlässlich, um anfängliche Sensor-Bias und thermische Instabilität zu minimieren.
Magnetische Kompensation: Bei unbemannten See- und Bodensystemen, bei denen eisenhaltige Materialien oder lokale magnetische Anomalien häufig vorkommen, verwenden fortschrittliche Systeme eine adaptive Magnetmodellierung in Echtzeit oder wechseln, was entscheidend ist, in einen kursfreien Modus, der durch externe Navigationsquellen wie einen Doppler-Geschwindigkeitsmesser (DVL) oder ein GNSS-System mit zwei Antennen unterstützt wird.
Abweichungsschätzung: Die Fähigkeit des Kalman-Filters, Gyro-Abweichungen in Echtzeit zu schätzen und zu beseitigen, ist die wichtigste Technik zur Steuerung langfristiger Lageabweichungen.
Anwendungen von AHRS in unbemannten Systemen
Flugsteuerung und Navigationsstabilität von UAVs
Das Lage- und Kursreferenzsystem ist das Nervensystem eines UAV. Multirotor-Flugzeuge sind auf eine schnelle Lage-Rückmeldung mit geringer Latenz angewiesen, um die Schubvektorsteuerung zu verwalten und einen gleichmäßigen Flug aufrechtzuerhalten. Starrflügler und VTOL-Systeme verwenden AHRS-Daten, um ihre Flugbahnen zu stabilisieren, dynamische Übergänge zu verwalten und die Georeferenzierung für wichtige ISR-Nutzlasten (Intelligence, Surveillance and Reconnaissance) zu verbessern. Präzise Lage-Daten sind auch für eine effektive Windkompensation während der autonomen Navigation von entscheidender Bedeutung.
Mobilität und Geländegängigkeit von UGVs
Bei Bodenrobotern unterstützen konsistente Lage-Informationen die Traktionskontrolle, sodass das Fahrzeug Neigungswinkel genau einschätzen und sicher bewältigen kann. Orientierungsdaten sind auch für Navigationssysteme unerlässlich, um die Radodometrie korrekt zu interpretieren und die Situationserkennung auf unebenem oder schwierigem Gelände aufrechtzuerhalten. Jeder stabilisierte Turm oder fortschrittliche Sensor auf einem UGV ist für eine genaue Ausrichtung auf das AHRS angewiesen, um sicherzustellen, dass die Zielerfassung trotz der Bewegung der Plattform stabil bleibt.
ROV- und USV-Posenabschätzung für Wasserfahrzeuge
Die Meeresumwelt weist einzigartige Dynamiken auf. ROVs und unbemannte Oberflächenfahrzeuge (USVs) sind einer kontinuierlichen, durch Wellen verursachten Bewegung ausgesetzt, die herausgefiltert werden muss, um brauchbare Lageabschätzungen zu erhalten. Die größte technische Herausforderung ist die häufige Verschlechterung der Magnetometerleistung aufgrund von eisenhaltigen Schiffsstrukturen, Motoren und Unterwasserinfrastrukturen. Hochleistungsfähige marine AHRS-Einheiten legen daher Wert auf eine außergewöhnliche Gyroleistung und werden häufig mit akustischen oder Doppler-Systemen kombiniert, um eine stabile, zuverlässige Kursbestimmung in magnetisch schwierigen Gewässern zu gewährleisten.
AHRS für stabilisierte Drohnen-Nutzlasten und UAV-Sensorplattformen
Kardanaufhängung und EO/IR-Sensorstabilisierung
Kardanaufhängungssysteme erfordern eine schnelle Rückmeldung der Lage und Geschwindigkeit mit extrem geringer Latenz, um eine stabile Sichtlinie aufrechtzuerhalten, während sich die Host-Plattform aggressiv bewegt. Das Lage- und Kursreferenzsystem liefert die absoluten Orientierungs- und Geschwindigkeitsdaten, die erforderlich sind, um der Bewegung der Plattform entgegenzuwirken und optische oder Infrarotkameras zu stabilisieren, die für Überwachungs-, Inspektions- oder Zielerfassungszwecke eingesetzt werden. Dies ist besonders wichtig für kleinere UAS, bei denen hochfrequente Vibrationen ein ständiger Faktor sind.
Antennenausrichtung und Kommunikation
Hochleistungsantennen, die für Kommunikationsverbindungen oder Radarnutzlasten verwendet werden, müssen eine hohe Ausrichtungsgenauigkeit aufweisen. Unabhängig davon, ob es sich um ein Starrflügel-UAV oder ein Seeschiff handelt, ermöglicht das AHRS dem Steuerungssystem, unabhängig von der Bewegung des Fahrzeugs eine Sichtverbindung aufrechtzuerhalten und sorgt so für stabile Verbindungen für Richtfunkdatenverbindungen, Phased-Array-Antennen und SATCOM-Terminals.
Überlegungen zur Integration und Schnittstellen
Eine effektive Integration erfordert eine sorgfältige Auswahl von Schnittstellenstandards und Synchronisationsprotokollen:
Datenschnittstellen: Während ältere oder spezialisierte militärische Plattformen möglicherweise ARINC oder MIL-STD-1553 verwenden, setzen die meisten modernen kommerziellen und industriellen UAS-Architekturen aufgrund ihrer Zuverlässigkeit und deterministischen Eigenschaften auf CAN (Controller Area Network) und aufgrund der hohen Bandbreite für die Datenerfassung und zentralisierte Verarbeitung auf Ethernet (zunehmend mit TSN-Fähigkeiten). UART ist nach wie vor weit verbreitet für Mikro-UAS mit geringem SWaP.
Zeitsynchronisation: Eine genaue Zeitabstimmung zwischen AHRS, GNSS-Empfänger und Missionscomputer ist für eine präzise Georeferenzierung von entscheidender Bedeutung. Methoden wie die PPS-Synchronisation (Pulse Per Second) oder Netzwerkzeitprotokolle stellen sicher, dass die Daten genau gestempelt werden, wodurch Fehler bei der Positions- und Lagekorrelation minimiert werden.
Software-Integration: Moderne Autopiloten und Steuerungssysteme bevorzugen standardisierte Nachrichtenprotokolle wie MAVLink oder ROS-Nachrichten. AHRS-Anbieter, die robuste APIs und gut strukturierte Treiber bereitstellen, reduzieren die Gesamtintegrationszeit und das Risiko für Systemintegratoren erheblich.
Inertial Labs stellt IRINS LEO-gestütztes Trägheitsnavigationssystem vor, das Trägheitsnavigation, Höhen- und Kursreferenz und robustes Timing für eine sichere Positionierung zu Lande, in der Luft und auf See in unzugänglichen Umgebungen vereint