Showcase your capabilities
If you design, build or supply IO Interfaces, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




I/O Interfaces for autonomous and unmanned systems; suppliers of drone input-output systems - remote IO modules, analogue, digital and ethernet IO used in IoT
Read the Technology Overview

Edge AI Compute & SOM Platforms for Next-Generation UAV Autonomy & Robotics

Rugged Computing and Video I/O Modules: 6U & 3U VPX, XMC, VNX+, and other Small Form Factors and Custom Solutions

Embedded Controllers, Avionics Testing, HIL Simulation & Data Acquisition Systems for UAV/UAS Applications
If you design, build or supply IO Interfaces, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

I/O or input-output interfaces allow the processor in a drone or robotic vehicle to communicate with the outside world or other parts of the system. This communication may be with sensors and payloads, drone autopilots or electronic speed controllers (ESCs), external storage, actuators for flight surfaces, and a variety of other devices.

UAS Hardware & IO System Solutions by UEI
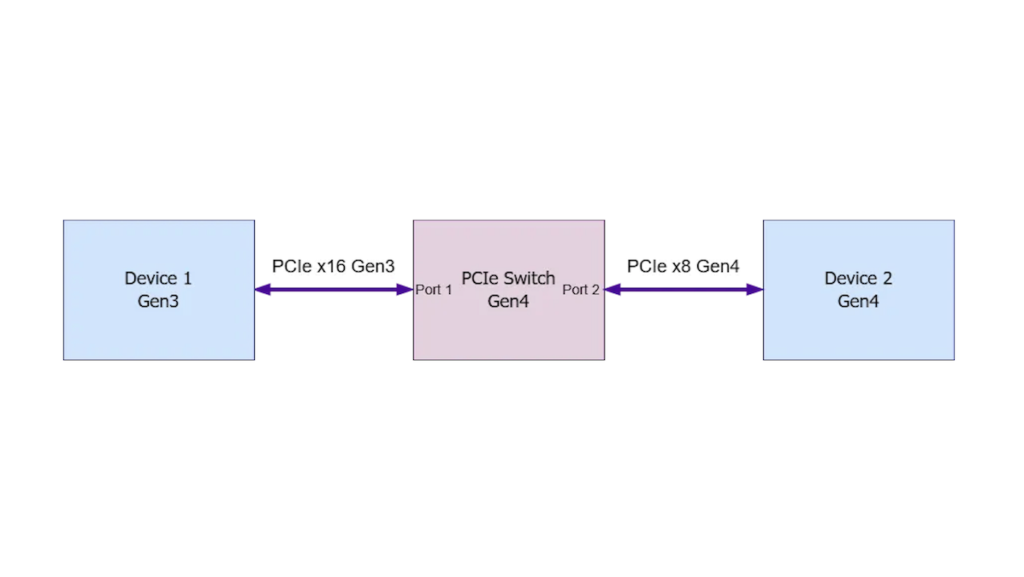
Remote I/O interfaces may be built into the computing system or may take the form of pluggable modules that expand the I/O capabilities of processor boards and single-board computers (SBCs) built around standard form factors such as PCI/104e or COM Express. They may include a variety of ports and interfaces for standard connectors such as USB, micro D-sub or MIL-DTL-38999 military circular connectors.
IoT devices such as remote computers, drones and robots may often require additional input-output capabilities, a broad range of application dependant expansion I/O modules exist to address this purpose.
Remote I/O modules may provide communication via analogue or digital signals. Analogue inputs may come from sensors that measure environmental factors such as temperature or pressure, and analogue outputs may be required to communicate with devices such as control actuators for flight surfaces, antenna platform steering or fluid hydraulics. Since computers operate with digital signals, analogue I/O modules require built-in analogue-to-digital and digital-to-analogue convertors (ADC and DAC).
Digital I/O systems may provide communications via a wide range of protocols. Serial protocols include RS-232, RS-422 and RS-485, which differ in the number of commanding and listening devices per port and the maximum length signals can travel. Other common protocols include PWM (pulse width modulation), UART, I2C, USB and CANbus.

Analogue and Digital I/O Modules and Adapters by Sealevel Systems
I/O interfaces may also be used to connect hardware-in-the-loop (HIL) systems during the testing of drone and unmanned system designs. These systems allow real-time simulation with realistic signals that mimic those that would be utilized during actual operation.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.