If you design, build or supply Miniature Inertial Navigation Systems, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.
Miniature INS Systems for Drones & Unmanned Systems
Due to their small form factor, miniature Inertial Navigation Systems (INS) are ideal for unmanned aerial vehicles (UAVs) such as multirotors, hybrid and fixed-wing UAVs with SWaP constraints. Miniature INS systems are incorporated into a wide variety of unmanned and autonomous systems including aerial drones, UGVs (unmanned ground vehicles), marine systems including AUVs (autonomous underwater vehicles) and other robotic platforms.
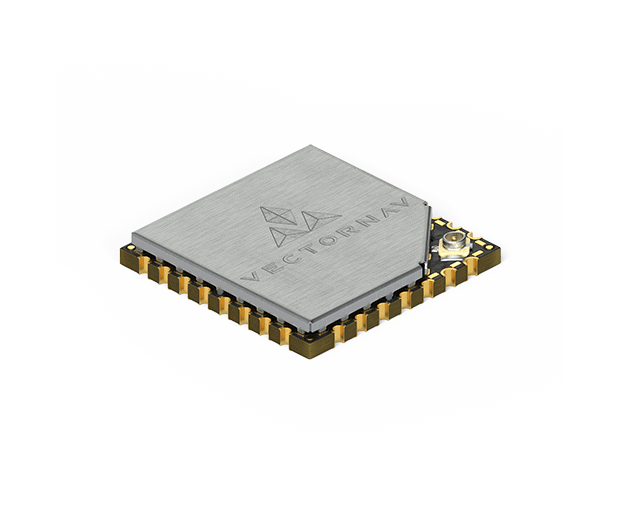
VN-100 Surface Mount Miniature INS
Micro INS & MEMS Technology
Micro INS often incorporate MEMs (microelectromechanical systems) such as MEMS accelerometers, gyros, and magnetometers, as well as other sensor data, including barometric pressure and GPS/GNSS, to deliver highly accurate estimations concerning attitude/orientation, velocity, and position. Real Time Kinematic (RTK) positioning can also be applied using RTK base station corrections data, to achieve even greater accuracy.
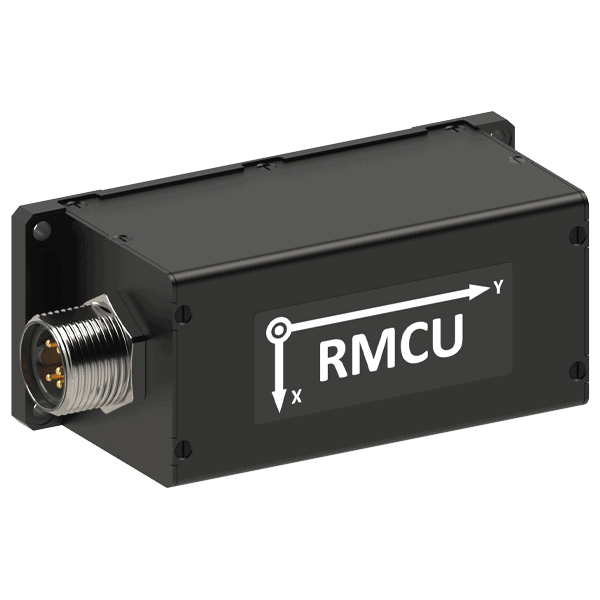
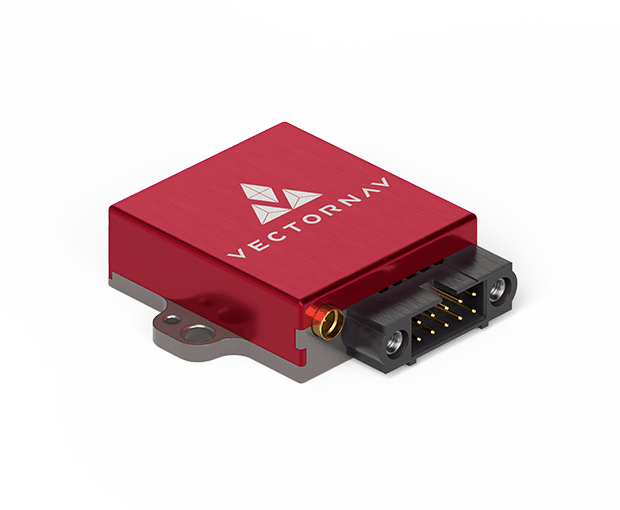
Rugged, Small GPS-INS
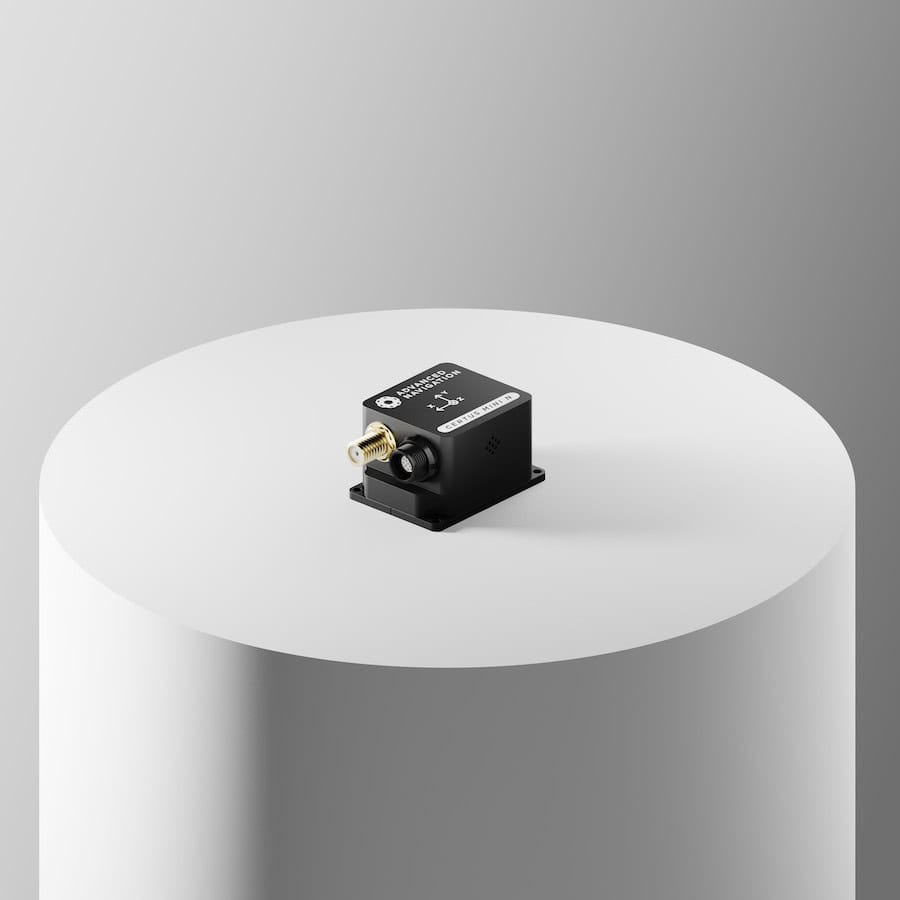
Spatial Miniature MEMS INS by Advanced Navigation
Suited to harsh environments a miniature inertial navigation system doesn’t emit detectable radiation, is not susceptible to jamming and is remarkably self-reliant. Available as either board-level units or self-contained modules, miniature INS modules for unmanned applications are usually encased in lightweight, ruggedized enclosures making them ideal for use in harsh environments. It is possible for micro GPS-INS to determine an accurate True North heading in challenging environments even with magnetometer interference.
Ellipse 2 Micro INS for UAVs
Applications
Miniature INS are well suited to a broad range of unmanned and autonomous applications, including navigation, object tracking and platform stabilization, as well as directing antennas, radar and cameras. Sectors which utilize micro INS technology include; defense and security, aerial mapping and survey, and search and rescue.
Advanced Navigation's resilient inertial navigation solutions are designed to maintain precise drone tracking and engagement capabilities during electronic warfare conditions and total GPS denial to ensure mission success
Advanced Navigation has developed resilient, ITAR-free inertial navigation systems designed to maintain absolute positioning confidence for naval vessels operating within highly contested environments where GPS signals are frequently jammed or corrupted
SBG Systems introduces Stellar-40, a modular Inertial Navigation System (INS) designed to provide tactical-grade positioning for land, air and marine platforms operating in electronically challenged environments
Micro-Magic Inc introduces the U5000 high-performance Inertial Measurement Unit (IMU) to provide a tactical-grade domestic alternative for industrial and aerospace navigation
SBG Systems received the Innovation Trophy at the MOCI Trophées Île-de-France, recognising its advanced inertial navigation technologies and global market focus
SBG Systems and YellowScan enhance LiDAR mapping accuracy and efficiency through seamless integration of the compact Quanta Micro GNSS/INS and Qinertia post-processing software
Micro Magic has introduced a new Ring Laser Gyroscope series, the G-R90, G-R70, and G-R50, combining precision, stability, and SWaP efficiency to enhance performance in advanced INS and unmanned platforms
Advanced Navigation launches defence-ready Inertial Navigation Systems with integrated Electronic Protection to counter GNSS jamming, spoofing, and electromagnetic warfare threats
EMCORE’s new TAC-DSP-1750 Fiber Optic Gyroscope (FOG) combines proven design with advanced PIC technology, delivering unmatched precision, compactness, and reliability for tactical and autonomous systems
Oct 10, 2025
Advancing Unmanned Systems Through Strategic Collaboration
UST works with major OEMs to foster collaboration and increase engagement with SMEs, to accelerate innovation and drive unmanned systems capabilities forward.