Showcase your capabilities
If you design, build or supply DC Motors for Drones, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Find manufacturers of DC Motors for Drones, including Small DC Motors and Brushless DC Motors for UAV, UAS, unmanned systems and robotics.
Read the Technology Overview
Unified Propulsion Systems for Mission-Critical, High-Reliability UAV Platforms

Innovative Integrated Propulsion Systems for Professional Multirotor & Fixed-Wing Drone Platforms

COTS & Custom Drone Propellers, Brushed & BLDC motors, and ESCs for UAVs

If you design, build or supply DC Motors for Drones, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.

Powered by DC current, DC motors for drones convert power from batteries or power supplies into mechanical energy to enable flight. DC motors employ a commutator to reverse the direction of electric current within the rotor each time it rotates through half a turn, preventing the direction of spin changing with the magnetic field and ensuring continual single-direction rotation.

M Series Motors
Lightweight and SWaP optimized, brushless DC motors are often selected for drone flight. Brushless DC motors (BLDC motors) use a non-contact solution such as an optical encoder to switch the fields at the correct time, thus allowing the motor to rotate continuously in the same direction. Due to the lack of friction, BLDC motors require less maintenance and have a longer lifespan. They are more efficient than brushed motors and have a higher torque to weight ratio.
Many DC motors use brushes to transfer current from the commutator to the rotor. These brushed motors are relatively inexpensive and simple in design, but require maintenance and replacement of brushes. Friction between the brushes and the commutator causes wear, and also limits torque at higher speeds. Extremely small drones tend to use brushed motors since brushless DC motors are often heavier and also need to be equipped with an electronic speed controller (ESC) which adds additional weight.
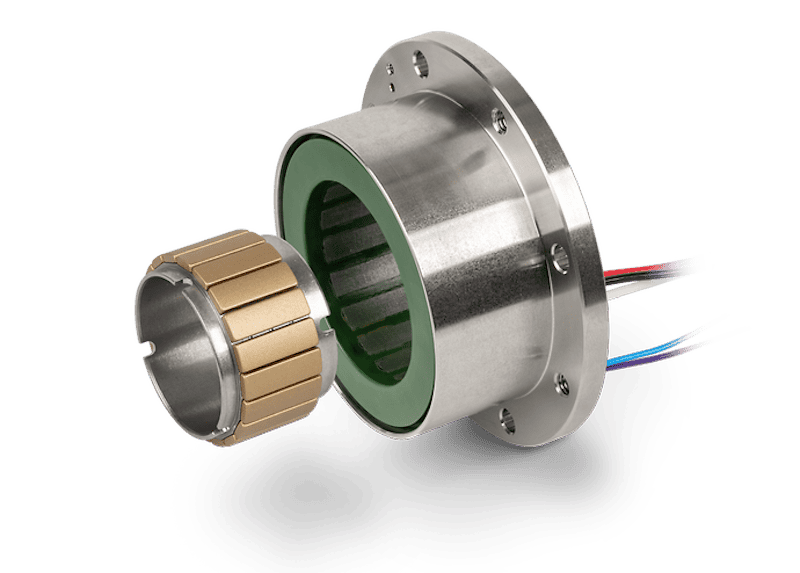
Permanent magnet DC motors use permanent magnets embedded in the rotor to generate a magnetic field rather than a wire coil excited by an electric current.

Antigravity Series DC Drone Motors by T-MOTOR
Small DC motors are commonly used to spin the propellers of quadcopters and other multirotor drones. In order to achieve flight, small DC motors are required to generate enough thrust to counteract the drone’s weight and so achieve liftoff. A drone’s weight has a proportional relationship to the power the drone motor is required to generate with the thrust-to-weight ratio being crucial to selection.
Small DC motors can also be used in larger unmanned systems within a range of subsystems including landing gear, antenna rotators and stabilized gimbals.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.