Sistemas de navegação inercial (INS) para drones e outras plataformas não tripuladas
Os sistemas de navegação inercial (INS) são um componente essencial para permitir a navegação autónoma em drones e outros sistemas não tripulados. Ao medir continuamente a rotação e a aceleração, o INS permite o rastreamento preciso da posição, velocidade e orientação, mesmo quando o GPS ou outros sinais externos não estão disponíveis. À medida que veículos aéreos não tripulados (UAVs), veículos terrestres não tripulados (UGVs), veículos de superfície não tripulados (USVs) e outras plataformas se tornam cada vez mais autónomos e são implantados em ambientes complexos, a importância de soluções INS robustas não pode ser subestimada.
Se você projeta, constrói ou fornece Sistemas de navegação inercial (INS), Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Sistemas de navegação inercial (INS) para drones e outras plataformas não tripuladas
Visão geral por
Caroline Rees
Atualizado:
Os sistemas de navegação inercial (INS) permitem que drones, veículos não tripulados e plataformas marítimas tenham um posicionamento preciso, mesmo quando o GPS falha.
Ao combinar dados de giroscópios, acelerómetros e magnetómetros através de filtros robustos, como o algoritmo de Kalman, o INS permite uma navegação fiável em condições de ausência de GNSS. Embora os INS baseados em MEMS sejam adequados para RPAs compactos, os sistemas de navegação atendem às necessidades táticas, marítimas e de defesa.
Como funcionam os sistemas de navegação inercial?
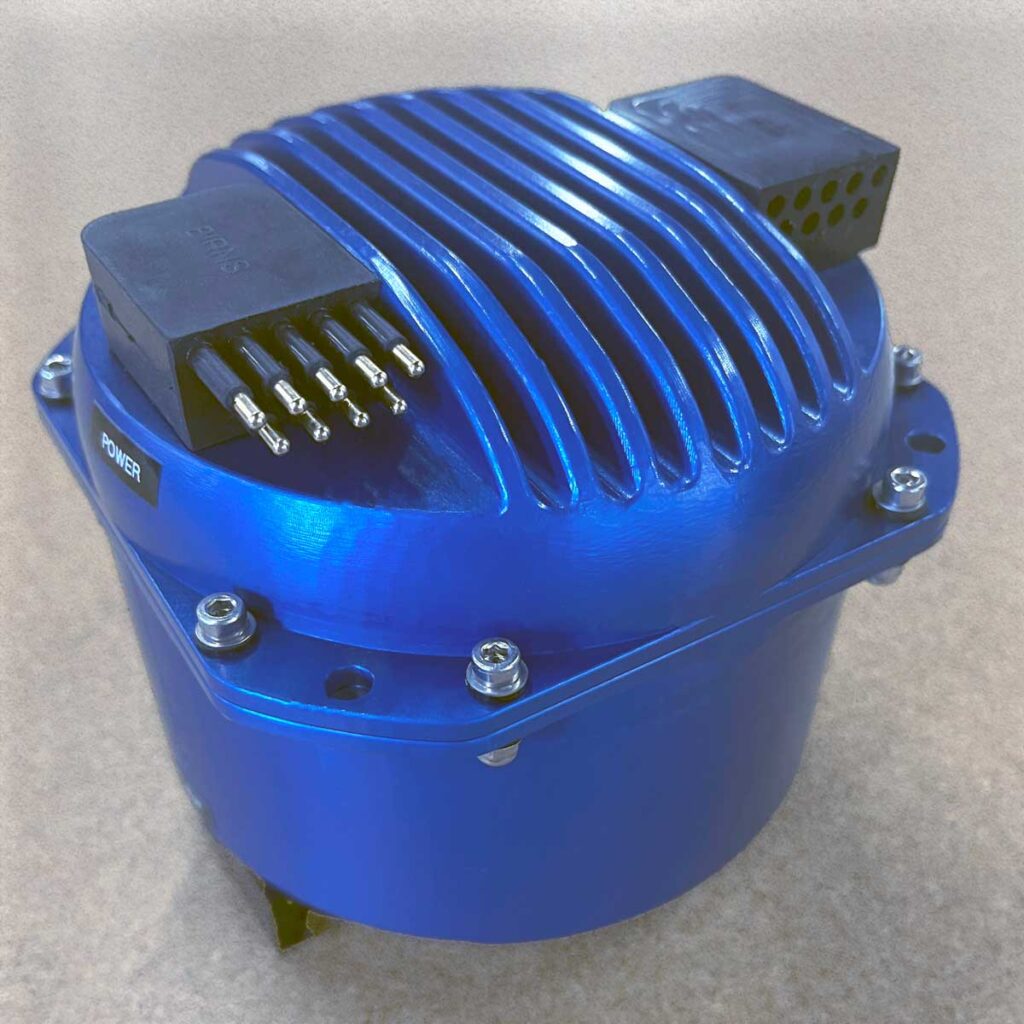
Navegador inercial/GNSS HGuide o480, da Honeywell.
Um INS depende de uma rede de sensores inerciais, giroscópios, acelerómetros e, muitas vezes, magnetómetros, para calcular a posição e a orientação em tempo real através da navegação estimada. Os giroscópios medem a velocidade angular (rumo, rotação, inclinação), enquanto os acelerómetros registam a aceleração linear em vários eixos. Os magnetómetros fornecem referências de rumo alinhadas com o campo magnético da Terra para mitigar o desvio.
Essas medições brutas são processadas por meio de algoritmos computacionais, como filtros Kalman, que fundem leituras de sensores, entradas de referência (como GNSS, quando disponível) e dinâmica inercial, produzindo estimativas refinadas dos estados de navegação. Essa fusão contínua de sensores corrige vieses, minimiza o desvio e melhora a precisão.
Componentes principais do INS
Giroscópios (giroscópios)
Os giroscópios são essenciais para os sistemas de navegação inercial, medindo a velocidade angular ao longo dos eixos da plataforma: inclinação, rotação e guinada. Em plataformas não tripuladas, particularmente drones, os giroscópios MEMS são frequentemente usados devido ao seu tamanho compacto e baixo consumo de energia. Para aplicações de maior precisão, como em UAVs táticos ou veículos subaquáticos, os giroscópios de fibra ótica ou laser em anel oferecem estabilidade significativamente maior e taxas de desvio mais baixas. Os giroscópios de fibra ótica (FOG), em particular, são valorizados pelo seu design robusto, fiabilidade a longo prazo e ausência de peças móveis, tornando-os adequados para ambientes adversos ou dinâmicos.
Acelerómetros
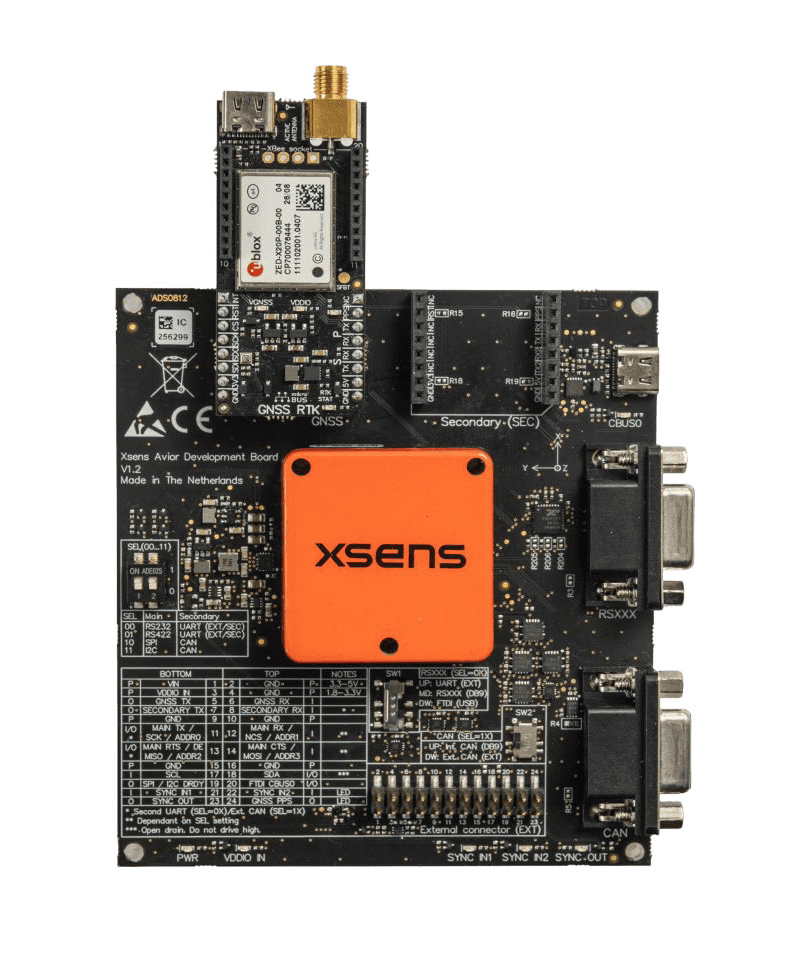
Sistema de navegação inercial MEMS da GuideNav.
Os acelerómetros detetam a aceleração linear em vários eixos, permitindo que o INS estime as alterações na velocidade e no deslocamento. Os sistemas de navegação inercial integram duplamente os dados de aceleração para calcular a posição; no entanto, este processo pode introduzir erros ao longo do tempo. Filtragem avançada e correção de viés são usadas para mitigar o desvio. Acelerômetros MEMS são comumente usados em plataformas leves, enquanto sistemas de alto desempenho se beneficiam de variantes mais sensíveis e com menos ruído.
Magnetómetros
Os magnetómetros medem o campo magnético da Terra para fornecer informações de direção. Estes sensores funcionam como bússolas digitais, oferecendo um ponto de referência global para ajudar a mitigar o desvio de guinada nos cálculos inerciais. No entanto, são sensíveis à interferência magnética, particularmente em ambientes com ruído elétrico ou perto de materiais ferrosos. Apesar disso, os magnetómetros continuam a ser um componente essencial em muitos sistemas de navegação de drones de pequeno e médio porte.
Receptores GNSS
Quando disponíveis, os receptores GNSS melhoram significativamente o desempenho do INS, corrigindo erros acumulados nas estimativas de posição e velocidade. Muitas configurações de INS utilizam integração GNSS/INS estreitamente acoplados, com correções RTK ou módulos GNSS de antena dupla que permitem uma navegação de alta precisão. Isto é especialmente valioso em aplicações que exigem precisão ao nível do centímetro, como levantamentos topográficos ou agricultura de precisão.
Altímetros barométricos
Para posicionamento vertical, os altímetros barométricos oferecem uma alternativa ou complemento à altitude derivada do GNSS. Esses sensores inferem a elevação medindo a pressão atmosférica, que muda com a altura. Embora sujeitos a variações climáticas e de deriva, os dados barométricos podem ser estabilizados por meio de calibração periódica ou fusão com estimativas GNSS e inerciais.
Software computacional incorporado
Os sistemas INS dependem de software incorporado para processar dados de sensores em tempo real. Os filtros Kalman — particularmente os filtros Kalman estendidos (EKF) — são os algoritmos de fusão mais comuns, combinando dados inerciais com entradas externas para refinar as estimativas de navegação. O software deve levar em consideração o desvio do sensor, as mudanças ambientais e as restrições de processamento em tempo real, especialmente em ambientes altamente dinâmicos ou sem GNSS.
Tipos de INS para plataformas não tripuladas
INS de nível de navegação
O INS de nível de navegação (também conhecido como INS convencional ou autônomo) utiliza sensores de alta qualidade, como giroscópios a laser em anel (RLG) ou giroscópios de fibra ótica (FOG), e acelerômetros de precisão. Estes sistemas são capazes de fornecer dados de posição e orientação altamente precisos durante longos períodos sem entrada externa; no entanto, são normalmente grandes, caros e consomem muita energia. São utilizados em plataformas aeroespaciais, submarinas e outras plataformas de missão crítica, onde a fiabilidade a longo prazo é essencial.
INS MEMS autónomo
O INS MEMS utiliza giroscópios e acelerómetros de sistemas microeletromecânicos (MEMS). Estes sistemas são significativamente menores, mais leves e mais eficientes em termos energéticos, tornando-os ideais para drones, eletrónica de consumo e plataformas portáteis. No entanto, normalmente sofrem de taxas de desvio mais elevadas e menor precisão ao longo do tempo em comparação com os sistemas de navegação.
INS tático/militar
O INS de nível tático preenche a lacuna entre os sistemas MEMS e os sistemas de navegação. Eles utilizam sensores inerciais de nível superior com estabilidade de polarização aprimorada e desvio reduzido. Esses sistemas são usados em UAVs militares, veículos terrestres e certas aplicações industriais que exigem melhor precisão sem o custo ou o volume de um INS de nível de navegação completo.
Sistemas INS auxiliados por GNSS (GNSS/INS)
O GNSS/INS ou INS integrado combina dados inerciais com a entrada do GNSS (Sistema Global de Navegação por Satélite) para corrigir o desvio e melhorar a precisão ao longo do tempo. Esses sistemas híbridos são comuns em aplicações comerciais e militares, especialmente onde é esperada perda intermitente do sinal GNSS, como em canyons urbanos, sob copas de árvores ou em ambientes contestados.
Outros veículos não tripulados
UGVs (veículos terrestres não tripulados)
O INS suporta a odometria em condições em que os codificadores das rodas se tornam pouco fiáveis, como durante derrapagens ou transições de terreno. Funciona em conjunto com câmaras, sistemas de visão computacional, LiDAR e sistemas de gestão de veículos para melhorar a navegação e a autonomia globais.
USVs e embarcações de superfície autónomas
O INS fornece rumo e posição em ambientes marítimos. Juntamente com os sistemas GNSS e bússola, eles suportam a navegação em águas profundas, levantamentos offshore e estabilização de embarcações.
UUVs e AUVs (veículos subaquáticos)
Frequentemente operam submersos, onde o GNSS não está disponível. O INS é essencial, utilizando sensores inerciais, DVL (registro de velocidade Doppler), sondas de profundidade, sonar e altímetros de pressão para navegação subaquática.
Desempenho do INS
O desempenho de um sistema de navegação inercial é normalmente avaliado pela sua precisão de atitude, desvio de posição e estabilidade ao longo do tempo. Sistemas de ponta, como os utilizados em UAVs táticos ou plataformas marítimas, podem manter a orientação dentro de 0,1 graus e limitar o desvio de posição a menos de um metro por hora. Em contrapartida, os sistemas compactos baseados em MEMS para pequenos drones são geralmente precisos dentro de 0,5 a 1 grau, embora apresentem taxas de desvio mais elevadas. Outros fatores importantes incluem a taxa de atualização do sistema, a estabilidade do viés e a capacidade de manter a altitude precisa, especialmente quando os sinais GNSS são fracos ou indisponíveis. Essas métricas são críticas ao selecionar um INS para aplicações que exigem navegação precisa e ininterrupta.
Desafios de integração e melhores práticas
A seleção do sensor deve equilibrar tamanho, peso, potência e custo com base nas restrições da plataforma. Os UAVs menores normalmente usam sensores MEMS, enquanto os sistemas maiores ou de missão crítica podem incorporar IMUs de nível tático. A calibração é essencial para corrigir o desvio de temperatura, o desalinhamento mecânico e as influências da vibração. O software deve ser robusto, capaz de executar filtragem de alta frequência (por exemplo, EKF) em tempo real para combinar dados de sensores inerciais, GNSS e, opcionalmente, sistemas de visão ou LiDAR.
Para operações sem GNSS, os sistemas devem ser capazes de alternar modos de forma autónoma e lidar com erros, enquanto missões de longa duração exigem navegação com desvio excepcionalmente baixo e modelagem precisa de condições dinâmicas. Considerações regulatórias também podem exigir a certificação do sistema, especialmente em aplicações de defesa, aeroespaciais ou marítimas.
INS vs GPS
Os sistemas GNSS/INS oferecem desempenho ideal ao combinar o posicionamento por satélite com estimativas inerciais, corrigindo o desvio e aumentando a confiabilidade. O INS puro, embora resistente a interferências e obstruções, sofre com o acúmulo de erros ao longo do tempo. Abordagens híbridas, particularmente arquiteturas fortemente acopladas, permitem o processamento simultâneo de dados GNSS brutos e dados IMU dentro de algoritmos de filtragem, resultando em melhor desempenho em ambientes desafiadores.
Considerações computacionais
O software de navegação inercial deve processar as entradas do sensor com latência mínima para garantir uma navegação precisa. A filtragem Kalman em tempo real, normalmente executada a 50 a 200 Hz, é necessária para manter uma navegação responsiva. Os sistemas avançados integram sensores adicionais, como LiDAR, visão e radar, para melhorar a consciência espacial e a precisão, particularmente em ambientes sem GNSS ou com poucas características. A escolha do processador integrado e da arquitetura do sistema tem uma influência significativa no desempenho do sistema, particularmente quando a sobrecarga computacional deve ser mantida baixa.
Aplicações
A navegação inercial é essencial no mapeamento de precisão e levantamento aéreo, onde os sistemas INS auxiliados por GNSS com RTK GNSS oferecem precisão na ordem de centímetros. Na entrega por drones e na inspeção, o INS robusto mantém a estabilidade e o controlo de voo mesmo em áreas confusas ou obstruídas. No domínio marítimo, os USVs e AUVs dependem do INS para obter rumo, profundidade e estabilização confiáveis em condições marítimas dinâmicas. As aplicações táticas e de defesa exigem sistemas de alta precisão e resistentes a interferências, capazes de manter a orientação e a posição com o mínimo de entrada externa.
Desempenho de nível de missão
Embora a integração do GNSS melhore o desempenho geral, o INS por si só é essencial para operações em ambientes sem GNSS, como interiores, subaquáticos, canyons urbanos ou sob condições de interferência. Os sistemas INS variam de soluções MEMS econômicas em pequenos drones a unidades altamente estáveis de nível de navegação usadas em aplicações de defesa, marítimas e táticas. Compreender as especificações do sensor, os comportamentos de desvio, os algoritmos de filtragem e as estratégias de integração é fundamental para alcançar um desempenho de navegação de nível de missão.