Sistemi di navigazione inerziale (INS) per droni e altre piattaforme senza pilota
I sistemi di navigazione inerziale (INS) sono un componente fondamentale per consentire la navigazione autonoma nei droni e in altri sistemi senza pilota. Misurando continuamente la rotazione e l'accelerazione, l'INS consente il tracciamento preciso della posizione, della velocità e dell'orientamento, anche quando il GPS o altri segnali esterni non sono disponibili. Man mano che i veicoli aerei senza pilota (UAV), i veicoli terrestri senza pilota (UGV), i veicoli di superficie senza pilota (USV) e altre piattaforme diventano sempre più autonomi e vengono impiegati in ambienti complessi, l'importanza di soluzioni INS robuste non può essere sottovalutata.
Se progettate, costruite o fornite Sistemi di navigazione inerziale (INS), Crea un profilo per mettere in evidenza le tue competenze ed entrare in contatto con i visitatori che hanno un bisogno concreto delle tue soluzioni.
Sistemi di navigazione inerziale (INS) per droni e altre piattaforme senza pilota
Panoramica da
Caroline Rees
Aggiornato:
I sistemi di navigazione inerziale (INS) consentono a droni, veicoli senza pilota e piattaforme marittime di ottenere un posizionamento preciso, anche in caso di malfunzionamento del GPS.
Fusionando i dati del giroscopio, dell’accelerometro e del magnetometro attraverso filtri robusti, come l’algoritmo di Kalman, l’INS consente una navigazione affidabile in condizioni di assenza di GNSS. Mentre gli INS basati su MEMS sono particolarmente adatti agli RPA compatti, i sistemi di navigazione soddisfano esigenze tattiche, marittime e di difesa.
Come funzionano i sistemi di navigazione inerziale?
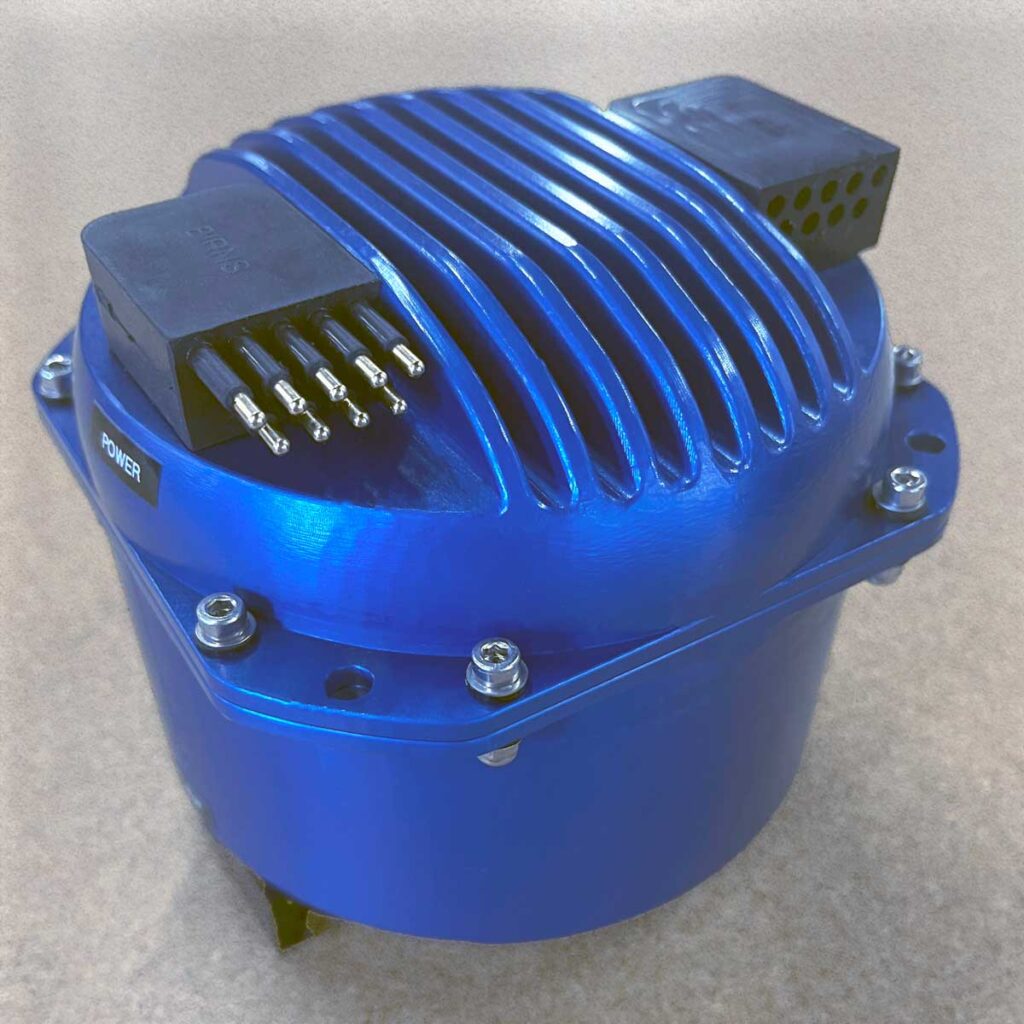
Navigatore inerziale/GNSS HGuide o480 di Honeywell.
Un INS si basa su una rete di sensori inerziali, giroscopi, accelerometri e spesso magnetometri per calcolare la posizione e l’orientamento in tempo reale attraverso la navigazione a stima. I giroscopi misurano la velocità angolare (direzione, rollio, beccheggio), mentre gli accelerometri registrano l’accelerazione lineare su più assi. I magnetometri forniscono riferimenti di direzione allineati con il campo magnetico terrestre per mitigare la deriva.
Queste misurazioni grezze vengono elaborate attraverso algoritmi computazionali, come i filtri di Kalman, che fondono le letture dei sensori, gli input di riferimento (come il GNSS, quando disponibile) e la dinamica inerziale, fornendo stime raffinate degli stati di navigazione. Questa fusione continua dei sensori corregge le distorsioni, riduce al minimo la deriva e migliora la precisione.
Componenti principali dell’INS
Giroscopi (giroscopi)
I giroscopi sono essenziali per i sistemi di navigazione inerziale, poiché misurano la velocità angolare lungo gli assi della piattaforma: beccheggio, rollio e imbardata. Nelle piattaforme senza pilota, in particolare nei droni, vengono spesso utilizzati giroscopi MEMS per le loro dimensioni compatte e il basso consumo energetico. Per applicazioni che richiedono una maggiore precisione, come gli UAV tattici o i veicoli subacquei, i giroscopi a fibra ottica o a laser ad anello offrono una stabilità significativamente maggiore e tassi di deriva inferiori. I giroscopi a fibra ottica (FOG), in particolare, sono apprezzati per il loro design robusto, l’affidabilità a lungo termine e l’assenza di parti mobili, che li rendono particolarmente adatti ad ambienti difficili o dinamici.
Accelerometri
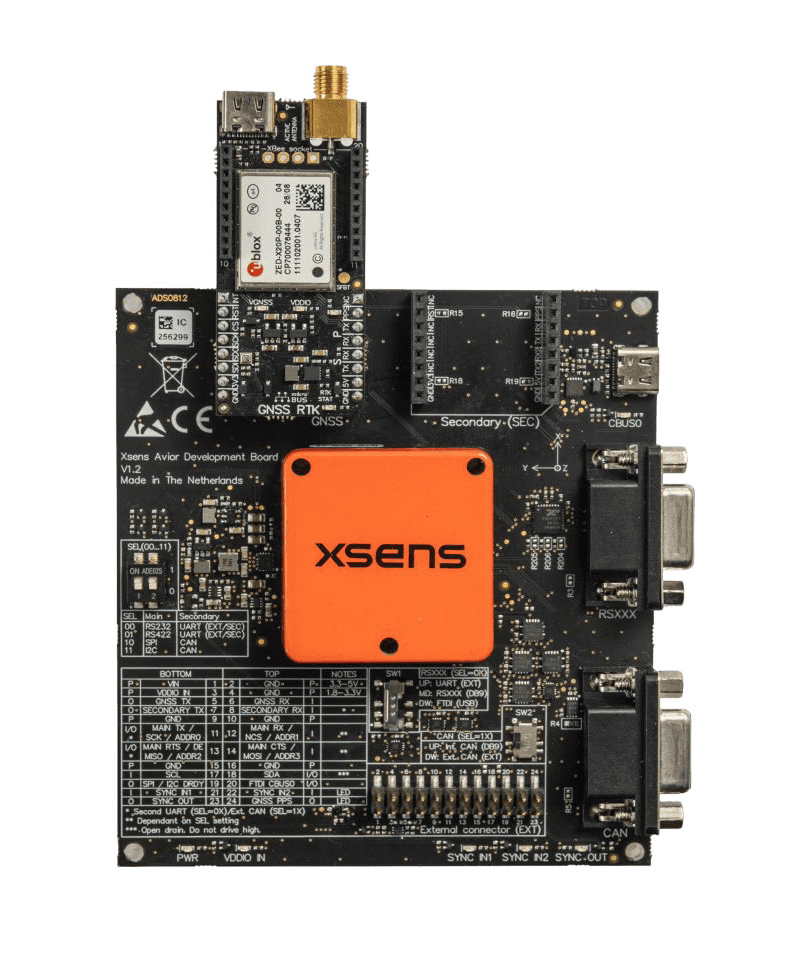
Sistema di navigazione inerziale MEMS di GuideNav.
Gli accelerometri rilevano l’accelerazione lineare su più assi, consentendo all’INS di stimare le variazioni di velocità e spostamento. I sistemi di navigazione inerziale integrano due volte i dati di accelerazione per calcolare la posizione; tuttavia, questo processo può introdurre errori nel tempo. Per mitigare la deriva vengono utilizzati filtri avanzati e correzioni di bias. Gli accelerometri MEMS sono comunemente utilizzati in piattaforme leggere, mentre i sistemi ad alte prestazioni traggono vantaggio da varianti più sensibili e con rumore inferiore.
Magnetometri
I magnetometri misurano il campo magnetico terrestre per fornire informazioni sulla direzione. Questi sensori agiscono come bussole digitali, offrendo un punto di riferimento globale per aiutare a mitigare la deriva di imbardata nei calcoli inerziali. Tuttavia, sono sensibili alle interferenze magnetiche, in particolare in ambienti elettricamente rumorosi o in prossimità di materiali ferrosi. Nonostante ciò, i magnetometri rimangono un componente chiave in molti sistemi di navigazione per droni di piccole e medie dimensioni.
Ricevitori GNSS
Quando disponibili, i ricevitori GNSS migliorano significativamente le prestazioni dell’INS correggendo gli errori accumulati nelle stime di posizione e velocità. Molte configurazioni INS utilizzano integrazione GNSS/INS strettamente accoppiati, con correzioni RTK o moduli GNSS a doppia antenna che consentono una navigazione ad alta precisione. Ciò è particolarmente utile in applicazioni che richiedono una precisione al centimetro, come il rilievo topografico o l’agricoltura di precisione.
Altimetri barometrici
Per il posizionamento verticale, gli altimetri barometrici offrono un’alternativa o un’integrazione all’altitudine derivata dal GNSS. Questi sensori deducono l’altitudine misurando la pressione atmosferica, che varia con l’altezza. Sebbene soggetti a derive e variabilità meteorologica, i dati barometrici possono essere stabilizzati attraverso una calibrazione periodica o la fusione con stime GNSS e inerziali.
Software computazionale integrato
I sistemi INS si basano su software integrato per elaborare i dati dei sensori in tempo reale. I filtri di Kalman, in particolare i filtri di Kalman estesi (EKF), sono gli algoritmi di fusione più comuni e combinano i dati inerziali con input esterni per affinare le stime di navigazione. Il software deve tenere conto della deriva dei sensori, dei cambiamenti ambientali e dei vincoli di elaborazione in tempo reale, soprattutto in ambienti altamente dinamici o in cui il GNSS non è disponibile.
Tipi di INS per piattaforme senza pilota
INS di grado di navigazione
L’INS di grado di navigazione (noto anche come INS convenzionale o autonomo) utilizza sensori di alta qualità, come giroscopi laser ad anello (RLG) o giroscopi a fibra ottica (FOG) e accelerometri di precisione. Questi sistemi sono in grado di fornire dati di posizione e orientamento altamente accurati per periodi prolungati senza input esterni; tuttavia, sono in genere grandi, costosi e consumano molta energia. Sono utilizzati nell’aerospaziale, nei sottomarini e in altre piattaforme mission-critical dove l’affidabilità a lungo termine è essenziale.
INS MEMS autonomo
L’INS MEMS utilizza giroscopi e accelerometri microelettromeccanici (MEMS). Questi sistemi sono significativamente più piccoli, leggeri ed efficienti dal punto di vista energetico, il che li rende ideali per droni, elettronica di consumo e piattaforme portatili. Tuttavia, in genere presentano tassi di deriva più elevati e una precisione inferiore nel tempo rispetto ai sistemi di navigazione.
INS tattico/militare
L’INS di livello tattico colma il divario tra i sistemi MEMS e quelli di navigazione. Utilizzano sensori inerziali di livello superiore con una maggiore stabilità di bias e una deriva ridotta. Questi sistemi sono utilizzati in UAV militari, veicoli terrestri e alcune applicazioni industriali che richiedono una maggiore precisione senza il costo o l’ingombro di un INS di livello navigazionale completo.
Sistemi INS assistiti da GNSS (GNSS/INS)
GNSS/INS o INS integrato fonde i dati inerziali con l’input GNSS (Global Navigation Satellite System) per correggere la deriva e migliorare la precisione nel tempo. Questi sistemi ibridi sono comuni sia nelle applicazioni commerciali che militari, in particolare dove è prevista una perdita intermittente del segnale GNSS, come nei canyon urbani, sotto la chioma degli alberi o in ambienti contesi.
Altri veicoli senza pilota
UGV (veicoli terrestri senza pilota)
L’INS supporta l’odometria in condizioni in cui gli encoder delle ruote diventano inaffidabili, come durante lo slittamento o i cambiamenti di terreno. Funziona in combinazione con telecamere, sistemi di visione artificiale, LiDAR e sistemi di gestione dei veicoli per migliorare la navigazione e l’autonomia complessive.
USV e imbarcazioni di superficie autonome
L’INS fornisce la direzione e la posizione in ambienti marittimi. In combinazione con i sistemi GNSS e di bussola, supporta la navigazione in acque profonde, i rilievi offshore e la stabilizzazione delle imbarcazioni.
UUV e AUV (veicoli subacquei)
Spesso operano in immersione dove il GNSS non è disponibile. L’INS è essenziale e utilizza sensori inerziali, DVL (Doppler velocity log), ecoscandagli, sonar e altimetri a pressione per la navigazione subacquea.
Prestazioni dell’INS
Le prestazioni di un sistema di navigazione inerziale vengono generalmente valutate in base alla precisione dell’assetto, alla deriva di posizione e alla stabilità nel tempo. I sistemi di fascia alta, come quelli utilizzati negli UAV tattici o nelle piattaforme marittime, sono in grado di mantenere l’orientamento entro 0,1 gradi e limitare la deriva di posizione a meno di un metro all’ora. Al contrario, i sistemi compatti basati su MEMS per piccoli droni hanno generalmente una precisione compresa tra 0,5 e 1 grado, sebbene presentino tassi di deriva più elevati. Altri fattori importanti includono la frequenza di aggiornamento del sistema, la stabilità del bias e la capacità di mantenere un’altitudine accurata, soprattutto quando i segnali GNSS sono deboli o non disponibili. Questi parametri sono fondamentali nella scelta di un INS per applicazioni che richiedono una navigazione precisa e ininterrotta.
Sfide di integrazione e best practice
La scelta dei sensori deve bilanciare dimensioni, peso, potenza e costo in base ai vincoli della piattaforma. Gli UAV più piccoli utilizzano tipicamente sensori MEMS, mentre i sistemi più grandi o mission-critical possono incorporare IMU di livello tattico. La calibrazione è essenziale per correggere la deriva termica, il disallineamento meccanico e le influenze delle vibrazioni. Il software deve essere robusto, in grado di eseguire il filtraggio ad alta frequenza (ad esempio, EKF) in tempo reale per combinare i dati provenienti dai sensori inerziali, dal GNSS e, facoltativamente, dai sistemi di visione o LiDAR.
Per le operazioni in cui il GNSS non è disponibile, i sistemi devono essere in grado di passare autonomamente da una modalità all’altra e di gestire gli errori, mentre le missioni di lunga durata richiedono una navigazione con deriva eccezionalmente bassa e una modellizzazione precisa delle condizioni dinamiche. Considerazioni normative possono anche richiedere la certificazione del sistema, in particolare nelle applicazioni di difesa, aerospaziali o marittime.
INS vs GPS
I sistemi GNSS/INS offrono prestazioni ottimali fondendo il posizionamento satellitare con stime inerziali, correggendo la deriva e aumentando l’affidabilità. L’INS puro, pur essendo resistente alle interferenze e agli ostacoli, soffre di un accumulo di errori nel tempo. Gli approcci ibridi, in particolare le architetture strettamente accoppiate, consentono l’elaborazione simultanea dei dati GNSS grezzi e dei dati IMU all’interno di algoritmi di filtraggio, con conseguente miglioramento delle prestazioni in ambienti difficili.
Considerazioni computazionali
Il software di navigazione inerziale deve elaborare gli input dei sensori con una latenza minima per garantire una navigazione accurata. Il filtraggio Kalman in tempo reale, che in genere funziona a 50-200 Hz, è necessario per mantenere una navigazione reattiva. I sistemi avanzati integrano sensori aggiuntivi, come LiDAR, visione e radar, per migliorare la consapevolezza spaziale e la precisione, in particolare in ambienti privi di GNSS o con caratteristiche limitate. La scelta del processore di bordo e dell’architettura di sistema ha un’influenza significativa sulle prestazioni del sistema, in particolare quando il sovraccarico computazionale deve essere mantenuto basso.
Applicazioni
La navigazione inerziale è essenziale nella mappatura di precisione e nel rilevamento aereo, dove i sistemi INS assistiti da GNSS con RTK GNSS garantiscono una precisione al centimetro. Nelle consegne con droni e nelle ispezioni, un INS robusto mantiene la stabilità e il controllo di volo anche in aree ingombre o ostruite. Nel settore marittimo, gli USV e gli AUV si affidano all’INS per garantire una rotta, una profondità e una stabilizzazione affidabili in condizioni marine dinamiche. Le applicazioni tattiche e di difesa richiedono sistemi ad alta precisione e resistenti alle interferenze, in grado di mantenere l’orientamento e la posizione con un input esterno minimo.
Prestazioni di livello missionale
Sebbene l’integrazione GNSS migliori le prestazioni complessive, l’INS da solo è essenziale per le operazioni in ambienti in cui il GNSS non è disponibile, come interni, sott’acqua, canyon urbani o in condizioni di interferenza. I sistemi INS vanno dalle soluzioni MEMS economiche nei piccoli droni alle unità altamente stabili di livello navigazionale utilizzate in applicazioni di difesa, marittime e tattiche. Comprendere le specifiche dei sensori, i comportamenti di deriva, gli algoritmi di filtraggio e le strategie di integrazione è fondamentale per ottenere prestazioni di navigazione di livello missionale.