Systemy nawigacji inercyjnej (INS) dla dronów i innych platform bezzałogowych
Systemy nawigacji inercyjnej (INS) są kluczowym elementem umożliwiającym autonomiczną nawigację w dronach i innych systemach bezzałogowych. Dzięki ciągłemu pomiarowi obrotów i przyspieszenia, INS umożliwia precyzyjne śledzenie pozycji, prędkości i orientacji, nawet gdy sygnały GPS lub inne sygnały zewnętrzne są niedostępne. W miarę jak bezzałogowe statki powietrzne (UAV), bezzałogowe pojazdy naziemne (UGV), bezzałogowe pojazdy powierzchniowe (USV) i inne platformy stają się coraz bardziej autonomiczne i są wykorzystywane w złożonych środowiskach, nie można przecenić znaczenia solidnych rozwiązań INS.
Rozwiązania sprzętowe dla bezzałogowych statków powietrznych: systemy napędowe i paliwowe, serwomechanizmy i kontrolery lotu, rozwiązania obrazujące, wyrzutnie i spadochrony
Jeśli projektujesz, budujesz lub dostarczasz Systemy nawigacji inercyjnej (INS), Załóż profil, aby zaprezentować swoje możliwości i nawiązać kontakt z osobami, które aktywnie poszukują Twoich rozwiązań.
Systemy nawigacji inercyjnej (INS) dla dronów i innych platform bezzałogowych
Przegląd według
Caroline Rees
Aktualizacja:
Systemy nawigacji inercyjnej (INS) zapewniają dronom, pojazdom bezzałogowym i platformom morskim precyzyjne pozycjonowanie, nawet w przypadku awarii GPS.
Dzięki połączeniu danych z żyroskopu, akcelerometru i magnetometru za pomocą solidnych filtrów, takich jak algorytm Kalmana, INS umożliwia niezawodną nawigację w warunkach braku dostępu do GNSS. Podczas gdy systemy INS oparte na technologii MEMS dobrze nadają się do kompaktowych bezzałogowych statków powietrznych (RPA), systemy nawigacyjne służą do celów taktycznych, morskich i obronnych.
Jak działają inercyjne systemy nawigacyjne?
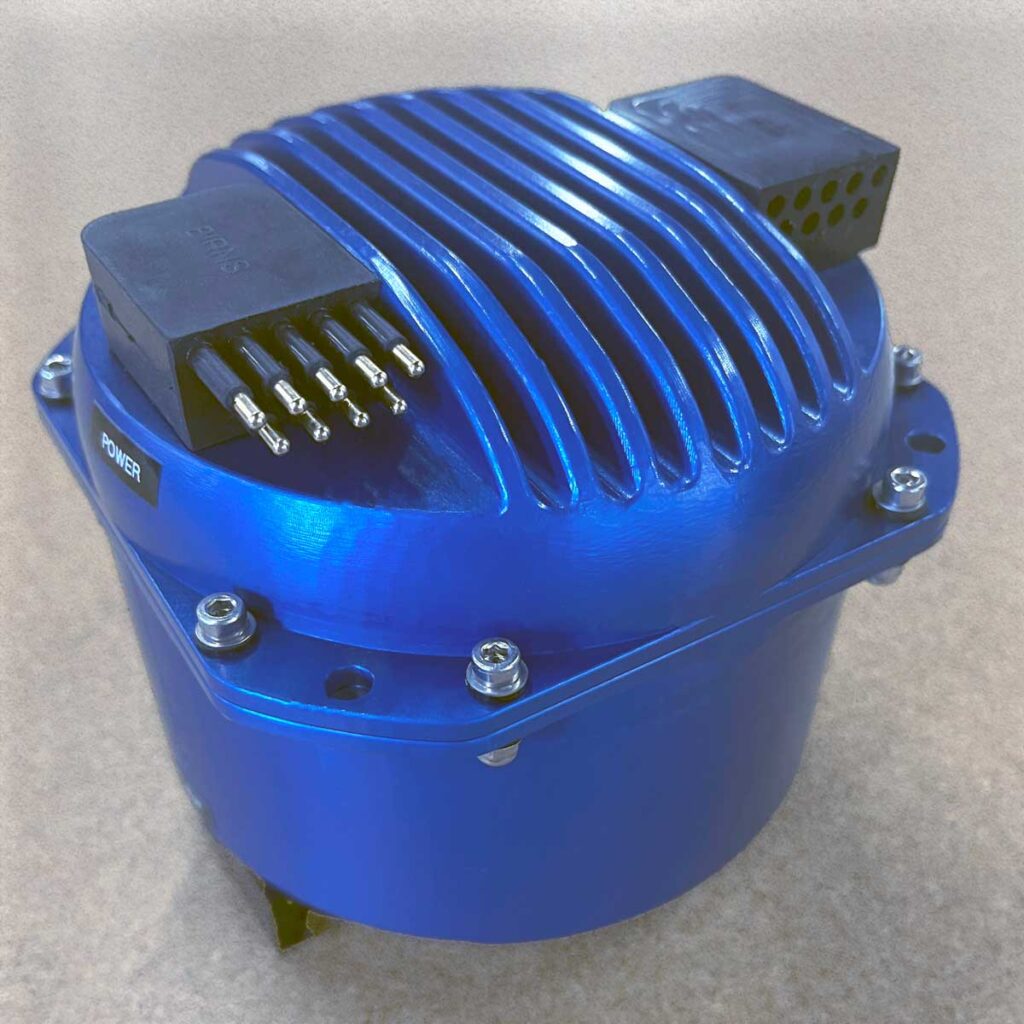
Nawigator inercyjny/GNSS HGuide o480 firmy Honeywell.
System INS opiera się na sieci czujników inercyjnych, żyroskopów, akcelerometrów i często magnetometrów, aby obliczać pozycję i orientację w czasie rzeczywistym poprzez nawigację zliczeniową. Żyroskopy mierzą prędkość kątową (kurs, przechył, pochylenie), podczas gdy akcelerometry rejestrują przyspieszenie liniowe w wielu osiach. Magnetometry dostarczają odniesienia kursu wyrównane z polem magnetycznym Ziemi, aby złagodzić dryf.
Te surowe pomiary są przetwarzane za pomocą algorytmów obliczeniowych, takich jak filtry Kalmana, które łączą odczyty czujników, dane referencyjne (np. GNSS, jeśli są dostępne) i dynamikę inercyjną, dając w rezultacie dokładniejsze oszacowania stanu nawigacji. Ta ciągła fuzja czujników koryguje odchylenia, minimalizuje dryf i poprawia dokładność.
Podstawowe komponenty INS
Żyroskopy (gyros)
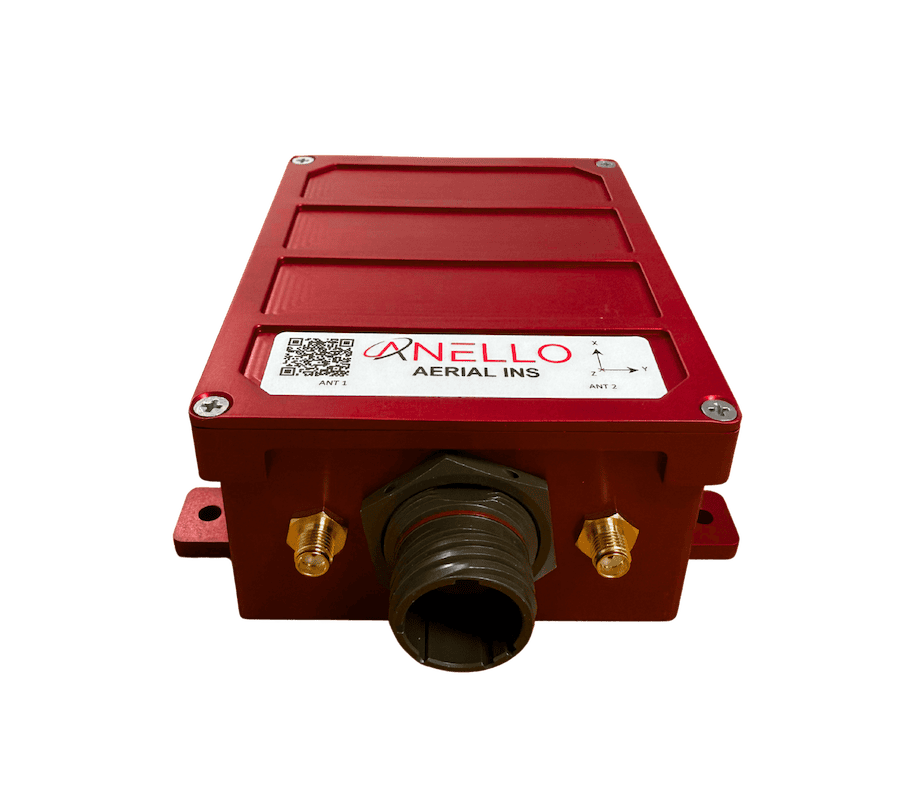
Żyroskopy są niezbędne w inercyjnych systemach nawigacyjnych, mierząc prędkość kątową wzdłuż osi platformy: pochylenie, przechył i odchylenie. W platformach bezzałogowych, zwłaszcza dronach, często stosuje się żyroskopy MEMS ze względu na ich kompaktowe rozmiary i niskie zużycie energii. W zastosowaniach wymagających większej dokładności, takich jak taktyczne bezzałogowe statki powietrzne (UAV) lub pojazdy podwodne, żyroskopy światłowodowe lub pierścieniowe zapewniają znacznie większą stabilność i niższe współczynniki dryfu. Żyroskopy światłowodowe (FOG) są szczególnie cenione za swoją wytrzymałą konstrukcję, długotrwałą niezawodność i brak ruchomych części, dzięki czemu doskonale nadają się do pracy w trudnych lub dynamicznych warunkach.
Akcelerometry
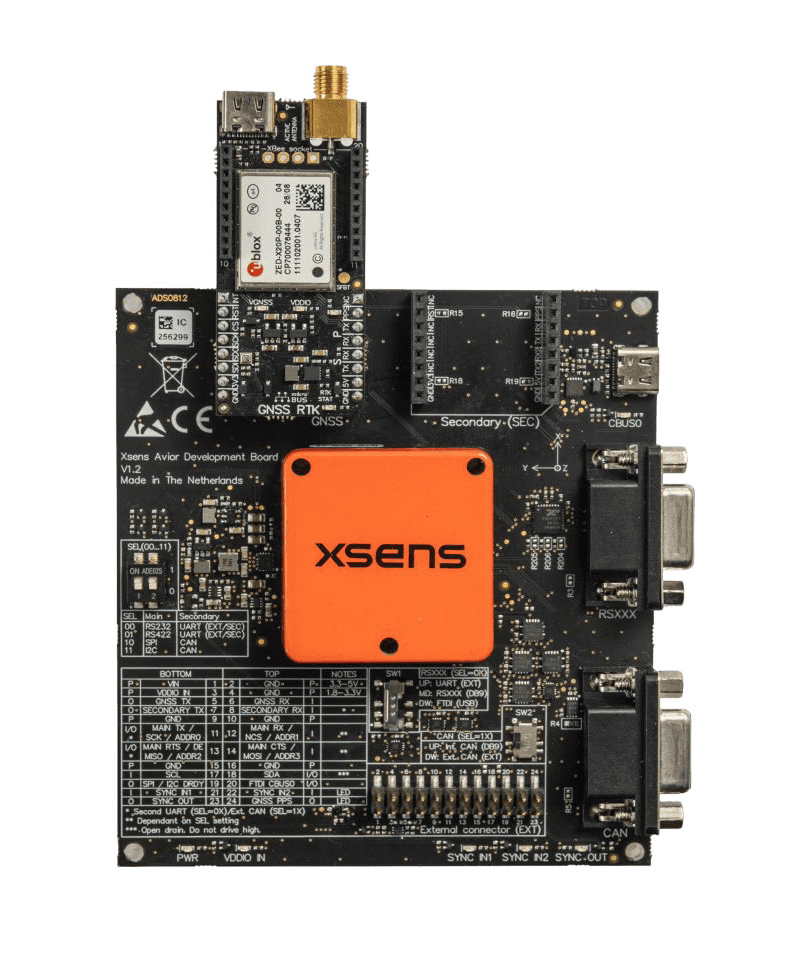
[caption id="attachment_185485" align="alignright" width="300"]System nawigacji inercyjnej MEMS firmy GuideNav.
Akcelerometry wykrywają przyspieszenie liniowe w wielu osiach, umożliwiając systemowi INS oszacowanie zmian prędkości i przemieszczenia. Systemy nawigacji inercyjnej podwójnie integrują dane dotyczące przyspieszenia w celu obliczenia pozycji; jednak proces ten może z czasem powodować błędy. Aby ograniczyć dryft, stosuje się zaawansowane filtrowanie i korekcję odchylenia. Akcelerometry MEMS są powszechnie stosowane w lekkich platformach, natomiast systemy o wysokiej wydajności korzystają z bardziej czułych i mniej hałaśliwych wariantów.
Magnetometry
Magnetometry mierzą pole magnetyczne Ziemi, aby dostarczyć informacji o kierunku. Czujniki te działają jak cyfrowe kompasy, oferując globalny punkt odniesienia, który pomaga ograniczyć dryft odchylenia w obliczeniach inercyjnych. Są one jednak wrażliwe na zakłócenia magnetyczne, szczególnie w środowiskach o wysokim poziomie szumów elektrycznych lub w pobliżu materiałów żelaznych. Mimo to magnetometry pozostają kluczowym elementem wielu małych i średnich systemów nawigacyjnych dronów.
Odbiorniki GNSS
Jeśli są dostępne, odbiorniki GNSS znacznie poprawiają wydajność INS, korygując skumulowane błędy w szacunkach pozycji i prędkości. Wiele konfiguracji INS wykorzystuje ściśle sprzężoną integrację GNSS/INS, z korektami RTK lub modułami GNSS z podwójną anteną, umożliwiającymi nawigację o wysokiej precyzji. Jest to szczególnie cenne w zastosowaniach wymagających centymetrowej dokładności, takich jak geodezja lub rolnictwo precyzyjne.
Altimetry barometryczne
W przypadku pozycjonowania pionowego altimetry barometryczne stanowią alternatywę lub uzupełnienie wysokości uzyskanej z GNSS. Czujniki te określają wysokość na podstawie pomiaru ciśnienia atmosferycznego, które zmienia się wraz z wysokością. Dane barometryczne podlegają dryftowi i zmienności pogodowej, ale można je ustabilizować poprzez okresową kalibrację lub połączenie z GNSS i szacunkami inercyjnymi.
Wbudowane oprogramowanie obliczeniowe
Systemy INS wykorzystują wbudowane oprogramowanie do przetwarzania danych z czujników w czasie rzeczywistym. Filtry Kalmana — w szczególności rozszerzone filtry Kalmana (EKF) — są najczęściej stosowanymi algorytmami fuzji, łączącymi dane inercyjne z danymi zewnętrznymi w celu udoskonalenia szacunków nawigacyjnych. Oprogramowanie musi uwzględniać dryft czujników, zmiany środowiskowe i ograniczenia przetwarzania w czasie rzeczywistym, zwłaszcza w środowiskach o dużej dynamice lub bez dostępu do GNSS.
Rodzaje systemów INS dla platform bezzałogowych
Systemy INS klasy nawigacyjnej
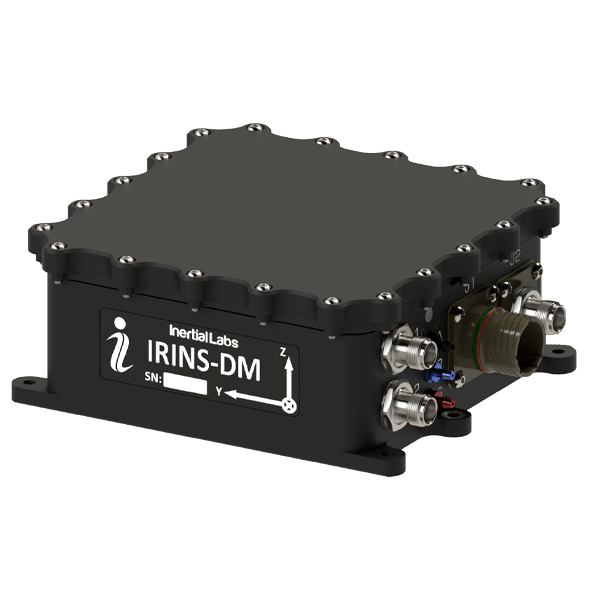
Systemy INS klasy nawigacyjnej (znane również jako konwencjonalne lub samodzielne systemy INS) wykorzystują czujniki wysokiej klasy, takie jak pierścieniowe żyroskopy laserowe (RLG) lub żyroskopy światłowodowe (FOG) oraz precyzyjne akcelerometry. Systemy te są w stanie dostarczać bardzo dokładne dane dotyczące położenia i orientacji przez długi czas bez zewnętrznego źródła danych, jednak zazwyczaj są duże, drogie i energochłonne. Są one wykorzystywane w lotnictwie, okrętach podwodnych i innych platformach o znaczeniu krytycznym, gdzie niezbędna jest długoterminowa niezawodność.
Samodzielny system INS MEMS
System INS MEMS wykorzystuje żyroskopy i akcelerometry mikroelektromechaniczne (MEMS). Systemy te są znacznie mniejsze, lżejsze i bardziej energooszczędne, co czyni je idealnymi do dronów, elektroniki użytkowej i platform przenośnych. Jednak zazwyczaj charakteryzują się one wyższymi współczynnikami dryftu i mniejszą dokładnością w czasie w porównaniu z systemami nawigacyjnymi.
Taktyczne/wojskowe INS
Taktyczne systemy INS wypełniają lukę między systemami MEMS a systemami nawigacyjnymi. Wykorzystują one czujniki inercyjne wyższej klasy o zwiększonej stabilności odchylenia i zmniejszonym dryfcie. Systemy te są stosowane w wojskowych bezzałogowych statkach powietrznych, pojazdach naziemnych i niektórych zastosowaniach przemysłowych, które wymagają większej dokładności bez kosztów i rozmiarów pełnego systemu INS klasy nawigacyjnej.
Systemy INS wspomagane przez GNSS (GNSS/INS)
GNSS/INS lub zintegrowane INS łączą dane inercyjne z danymi GNSS (Global Navigation Satellite System) w celu korekcji dryftu i poprawy dokładności w czasie. Te hybrydowe systemy są powszechnie stosowane zarówno w zastosowaniach komercyjnych, jak i wojskowych, zwłaszcza tam, gdzie spodziewana jest przerywana utrata sygnału GNSS, np. w kanionach miejskich, pod baldachimem drzew lub w środowiskach spornych.
Inne pojazdy bezzałogowe
UGV (bezzałogowe pojazdy naziemne)
INS wspiera odometrię w warunkach, w których enkodery kół stają się zawodne, np. podczas poślizgu lub zmian terenu. Działa w połączeniu z kamerami, systemami wizji komputerowej, LiDAR i systemami zarządzania pojazdami, aby poprawić ogólną nawigację i autonomię.
USV i autonomiczne statki powierzchniowe
INS zapewnia kurs i pozycję w środowisku morskim. W połączeniu z systemami GNSS i kompasami wspierają nawigację głębinową, badania morskie i stabilizację statków.
UUV i AUV (pojazdy podwodne)
Często działają pod wodą, gdzie GNSS jest niedostępny. INS jest niezbędny, wykorzystując czujniki inercyjne, DVL (dopplerowski log prędkości), echosondy, sonary i wysokościomierze ciśnieniowe do nawigacji podwodnej.
Wydajność INS
Wydajność inercyjnego systemu nawigacyjnego jest zazwyczaj oceniana na podstawie dokładności położenia, dryfu pozycji i stabilności w czasie. Systemy wysokiej klasy, takie jak te stosowane w taktycznych bezzałogowych statkach powietrznych (UAV) lub platformach morskich, mogą utrzymać orientację w zakresie 0,1 stopnia i ograniczyć dryf pozycji do poniżej jednego metra na godzinę. Natomiast kompaktowe systemy oparte na technologii MEMS dla małych dronów mają zazwyczaj dokładność w zakresie od 0,5 do 1 stopnia, chociaż wykazują wyższe wskaźniki dryfu. Inne ważne czynniki to częstotliwość aktualizacji systemu, stabilność odchylenia i zdolność do utrzymania dokładnej wysokości, zwłaszcza gdy sygnały GNSS są słabe lub niedostępne. Parametry te mają kluczowe znaczenie przy wyborze systemu INS do zastosowań wymagających precyzyjnej, nieprzerwanej nawigacji.
Wyzwania związane z integracją i najlepsze praktyki
Wybór czujnika musi uwzględniać równowagę między rozmiarem, wagą, mocą i kosztem w oparciu o ograniczenia platformy. Mniejsze bezzałogowe statki powietrzne zazwyczaj wykorzystują czujniki MEMS, podczas gdy większe lub krytyczne dla misji systemy mogą zawierać taktyczne IMU. Kalibracja jest niezbędna do skorygowania dryftu temperaturowego, niewspółosiowości mechanicznej i wpływu wibracji. Oprogramowanie musi być solidne i zdolne do filtrowania wysokich częstotliwości (np. EKF) w czasie rzeczywistym w celu połączenia danych z czujników inercyjnych, GNSS i opcjonalnie systemów wizyjnych lub LiDAR.
W przypadku operacji bez dostępu do GNSS systemy muszą być zdolne do autonomicznego przełączania trybów i obsługi błędów, natomiast misje długotrwałe wymagają nawigacji o wyjątkowo niskim dryfcie i precyzyjnego modelowania warunków dynamicznych. Wymogi regulacyjne mogą również wymagać certyfikacji systemu, zwłaszcza w zastosowaniach obronnych, lotniczych lub morskich.
INS a GPS
Systemy GNSS/INS zapewniają optymalną wydajność dzięki połączeniu pozycjonowania satelitarnego z oszacowaniami inercyjnymi, korygując dryft i zwiększając niezawodność. Czysty INS, choć odporny na zakłócenia i przeszkody, cierpi z powodu kumulacji błędów w miarę upływu czasu. Podejścia hybrydowe, w szczególności architektury ściśle sprzężone, umożliwiają jednoczesne przetwarzanie surowych danych GNSS i danych IMU w ramach algorytmów filtrujących, co skutkuje lepszą wydajnością w trudnych warunkach.
Kwestie obliczeniowe
Oprogramowanie do nawigacji inercyjnej musi przetwarzać dane z czujników z minimalnym opóźnieniem, aby zapewnić dokładną nawigację. Aby utrzymać responsywną nawigację, wymagane jest filtrowanie Kalmana w czasie rzeczywistym, zazwyczaj działające z częstotliwością od 50 do 200 Hz. Zaawansowane systemy integrują dodatkowe czujniki, takie jak LiDAR, wizja i radar, aby zwiększyć świadomość przestrzenną i precyzję, szczególnie w środowiskach pozbawionych GNSS lub o niskiej charakterystyce. Wybór procesora pokładowego i architektury systemu ma znaczący wpływ na wydajność systemu, szczególnie gdy obciążenie obliczeniowe musi być utrzymane na niskim poziomie.
Zastosowania
Nawigacja inercyjna ma zasadnicze znaczenie w precyzyjnym mapowaniu i pomiarach lotniczych, gdzie systemy INS wspomagane przez GNSS z RTK GNSS zapewniają dokładność na poziomie centymetrów. W dostawach za pomocą dronów i inspekcjach solidny system INS zapewnia stabilność i kontrolę lotu nawet w obszarach o dużym zagęszczeniu lub z przeszkodami. W dziedzinie morskiej pojazdy USV i AUV polegają na systemie INS, który zapewnia niezawodny kurs, głębokość i stabilizację w dynamicznych warunkach morskich. Zastosowania taktyczne i obronne wymagają wysokiej dokładności, odpornych na zakłócenia systemów, które mogą utrzymać orientację i pozycję przy minimalnym wpływie czynników zewnętrznych.
Wydajność na poziomie misji
Chociaż integracja GNSS poprawia ogólną wydajność, sam system INS jest niezbędny do działania w środowiskach, w których GNSS nie jest dostępny, takich jak pomieszczenia zamknięte, pod wodą, kaniony miejskie lub w warunkach zakłóceń. Systemy INS obejmują zarówno ekonomiczne rozwiązania MEMS w małych dronach, jak i wysoce stabilne urządzenia nawigacyjne wykorzystywane w zastosowaniach obronnych, morskich i taktycznych. Zrozumienie specyfikacji czujników, zachowań dryfujących, algorytmów filtrowania i strategii integracji ma kluczowe znaczenie dla osiągnięcia wydajności nawigacyjnej na poziomie misji.