
Showcase your capabilities
If you design, build or supply Autonomy Software, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.




Find developers of Autonomy Software and Software for Robotics, including SDK (software development kits) and robotics middleware for unmanned systems
Read the Technology Overview


Military-Grade UAV Autopilot Systems for Advanced & Ultra-Reliable Flight Control
Fully Autonomous Multirotor Drones & Hybrid VTOL UAVs With AI Capabilities

Robotics and Subsea Technologies for Defense, Commercial & Science Applications

Inertial Navigation & Positioning Technology for Unmanned, Autonomous Systems

UAV Autopilot Flight Controllers, Ground Stations, ESC Controllers & Tracking Antennas

Advanced Imaging & Sensor Autonomy for Time-Critical Airborne Intelligence Missions

Innovative Wireless Mesh Networking Technology: Ultra-Reliable & Low-Latency Connectivity for Drones & Mobile Robotics
Cutting-Edge Drone Autopilots & UAS Platforms | Hardware & Software Solutions for Drones & Unmanned Systems
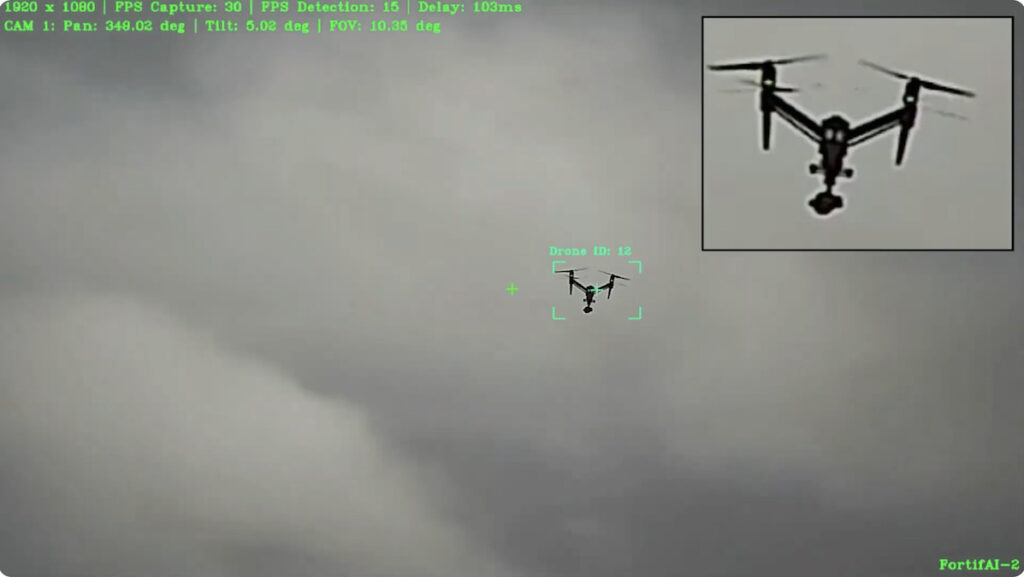
Edge-Based Visual AI Software Platform for Defence & Security Camera Automation
Drone Software Engineering Consultancy Providing Comprehensive UAV Platform Development Services
Embedded Systems Software Development, Firmware Programming & Drone Software Design/Testing Services
Radar Software & Sensor Processing Solutions, Maritime Radar Control, Tracking & Visualization for USV

Marine Autopilots, Unmanned Surface Vehicle Communications, Power Management Modules & Marine Simulators & Software

If you design, build or supply Autonomy Software, create a profile to showcase your capabilities and connect with visitors who have an active requirement for your solutions.


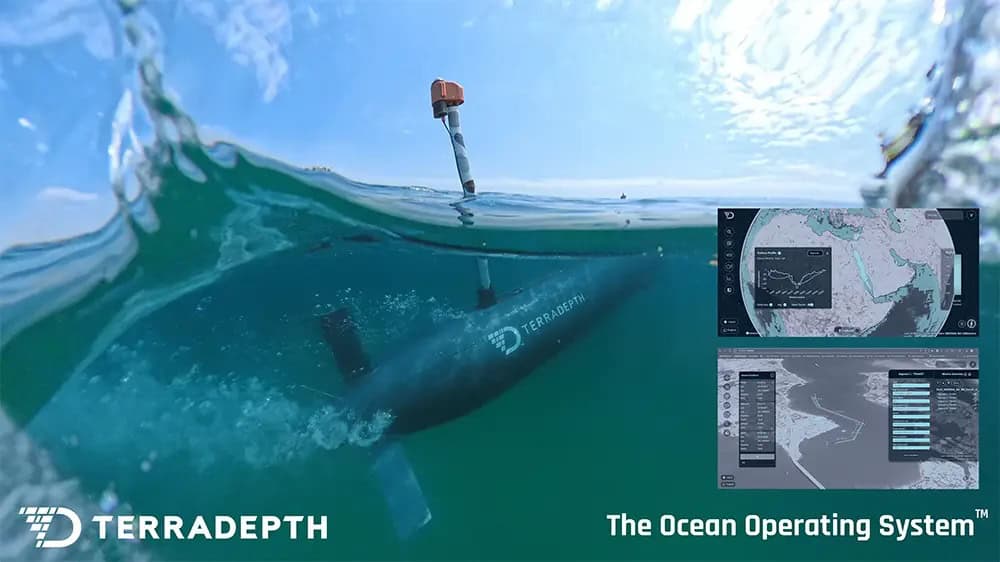
Neptune Autonomy Software for ASV and ROV by SeeByte
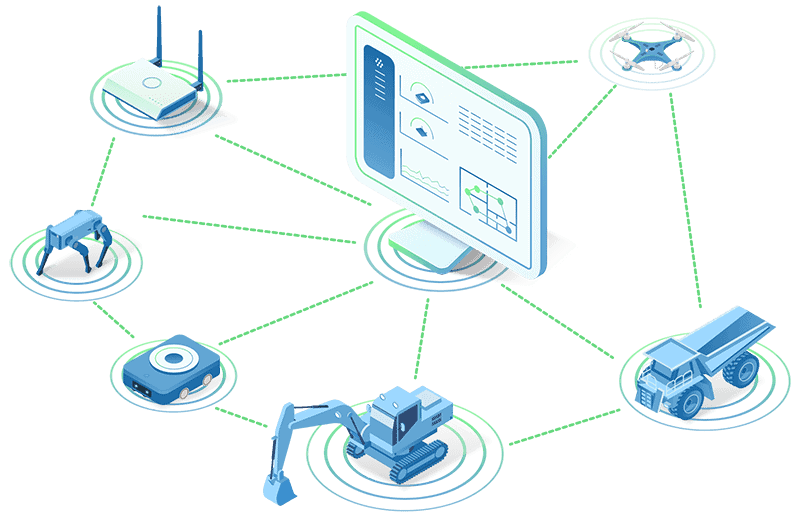
A wide variety of software is available to aid in the development of robotics systems and vehicles, including UAVs (unmanned aerial vehicles), UGVs (unmanned ground vehicles), USVs (uncrewed surface vessels) and UUVs (unmanned underwater vehicles). For aerial platforms, drone software provides a range of capabilities supporting flight control, mission planning, autonomy and data management. Robotics software may help with the design of these systems, or provide crucial abilities such as autonomy and decision-making.
Robotics SDK (software development kits) allow developers to create applications for particular robotic platforms, and accelerate development by doing away with the need to create all software from scratch. SDKs may provide pre-written building blocks or APIs that simplify control of particular features of the robot such as arms or propulsion systems, and may also provide algorithms for capabilities such as perception, navigation, and AI (artificial intelligence).
Robotics middleware is software that makes it easier for developers to manage the complexity of robotics systems, often providing a framework or architecture that abstracts away some of these complexities such as low-level communications. Much of the commonly-used middleware, such as ROS (Robot Operating System), is open-source.

VOTIX FLY – Drone-agnostic software & connectivity for BVLOS by VOTIX
Robotics and automation software may provide vehicles with abilities such as path-following and obstacle detection, as well as more advanced navigation capabilities such as SLAM (simultaneous localization and mapping), which allows a vehicle to operate within a previously unknown environment, creating and updating a map while successfully navigating and localizing itself within the area. AI software can also be used to provide a range of advanced capabilities, including computer vision, image recognition and classification, and self-driving.
A wide range of software packages for designing and modeling robotic systems hardware are also available, including 3D CAD software. These packages may include in-depth simulation capabilities with complex physics, allowing designs to be tested for mechanical operation and under different simulated environmental conditions such as varying fluid dynamics, terrain and weather.

 Searching Companies & Products
Searching Companies & Products



 Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.
Subscribe to the Weekly eBrief
The latest engineering and technical developments straight to your inbox - join thousands of engineers who receive it.