Ascend Engineering, a drone software engineering consultancy, has delivered a series of upstream contributions to the PX4 open-source ecosystem, with merged updates across core repositories including PX4-Autopilot, hardware integration components, and QGroundControl.
The work underscores Ascend Engineering’s commitment to open-source drone software development, delivering enhancements to payload delivery support, ground control station usability, release validation, sensor compatibility, and overall system reliability for the global PX4 community of operators, developers and integrators.
Hardpoint & QGroundControl Updates
Andrew Brahim, Principal Engineer at Ascend and PX4 maintainer, authored and merged a new UAVCAN node hardpoint command subscriber into the PX4-Autopilot main branch.
Previously, PX4 CANNODE actuation support included only servo and motor array commands. The new implementation introduces native DroneCAN support for hardpoint-based payloads such as grippers and delivery mechanisms, eliminating the need for workarounds and enabling reliable command and control of payload delivery hardware over DroneCAN for commercial delivery and inspection platforms.
Holden Ramsey, Engineer at Ascend and QGroundControl maintainer, also delivered a major refactor of QGroundControl’s joystick subsystem. The contribution migrates the codebase from SDL2 to SDL3 and unifies Android joystick support through SDL, replacing a legacy custom JNI implementation.
The update expands compatibility with commercially available controllers, particularly for Android-based ground control stations and tablet controllers used in commercial operations.
Enhancements include battery monitoring for connected controllers, gyroscope and accelerometer sensor support, LED and haptic feedback control, comprehensive unit testing, and an improved joystick indicator UI with connection state and battery status. Classified as an XL-sized contribution, the update is among the largest single pull requests merged into QGroundControl in recent months.
Sensor Integration & MAVROS Stability
Aaron Porter, Engineer at Ascend, authored a new PX4 driver enabling support for the Lightware GRF-500 laser rangefinder across both serial UART and I2C interfaces. The GRF-500 delivers up to 500 meters of range in a 10.7-gram form factor designed for gimbal integration, above-ground-level sensing, and EO/IR payload applications.
The I2C implementation has already been merged into PX4, while the UART version remains under review. Together, these additions expand the range of sensors natively supported within the PX4 ecosystem and further extend hardware compatibility across the open-source autopilot stack.
Alex Bennett, Engineer at Ascend Engineering, also contributed a bug fix to MAVROS, the widely used MAVLink-to-ROS interface for PX4 and ROS-based systems. The update resolves a race condition in parameter set operations where both a delayed acknowledgment and a timeout could attempt to resolve the same promise, causing the node to crash.
Fixed-Wing Flight Testing for PX4 v1.17 Beta
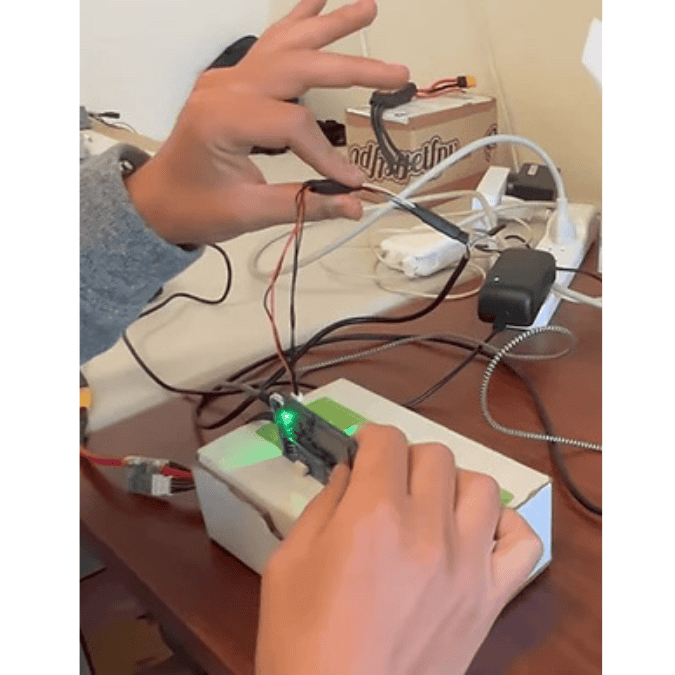
Ascend Engineering, serving as the official flight testing provider for the PX4 project on behalf of the Dronecode Foundation, carried out fixed-wing validation flights in support of the PX4 v1.17 Beta release. The team developed a dedicated fixed-wing aircraft configured with the PX4 1.17 Beta firmware, conducted structured evaluation flights, and documented the results.
To support broader community participation, Ascend also released a video tutorial outlining the complete build process, enabling developers and integrators to replicate the test platform and contribute additional validation. The effort underscores Ascend’s role in both advancing and verifying flight control software under real-world operating conditions.
Industry Commitment
Andrew Wilkins, Co-Founder of Ascend Engineering, commented, “We’ve hired the best engineers in the industry to show our clients that we are committed to their success. We invest in open source because it makes everything we build stronger. In just a few months, our team has merged driver-level contributions into PX4, added quality-of-life improvements to one of the most widely used GCSs, QGroundControl, flight tested for the latest PX4 release, and started building native support for new sensor hardware. We had a mission to show up in the codebase, and that’s exactly what we’re doing.”
As a Dronecode Foundation Silver Member and official PX4 flight testing provider, Ascend Engineering continues to demonstrate sustained participation in the open-source drone ecosystem, with contributions flowing directly into the repositories relied upon by operators worldwide.