Systèmes de navigation inertielle (INS) pour drones et autres plateformes sans pilote
Les systèmes de navigation inertielle (INS) sont un élément clé pour permettre la navigation autonome des drones et autres systèmes sans pilote. En mesurant en continu la rotation et l'accélération, l'INS permet un suivi précis de la position, de la vitesse et de l'orientation, même lorsque le GPS ou d'autres signaux externes ne sont pas disponibles. À mesure que les véhicules aériens sans pilote (UAV), les véhicules terrestres sans pilote (UGV), les véhicules de surface sans pilote (USV) et d'autres plateformes deviennent de plus en plus autonomes et sont déployés dans des environnements complexes, l'importance de solutions INS robustes ne peut être surestimée.
Solutions matérielles pour drones : systèmes de propulsion et de carburant, servomoteurs et contrôleurs de vol, solutions d'imagerie, lanceurs et parachutes
Si vous concevez, construisez ou fournissez Systèmes de navigation inertielle (INS), Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Systèmes de navigation inertielle (INS) pour drones et autres plateformes sans pilote
Vue d'ensemble par
Caroline Rees
Mise à jour:
Les systèmes de navigation inertielle (INS) permettent aux drones, aux véhicules sans pilote et aux plateformes maritimes de bénéficier d’un positionnement précis, même en cas de défaillance du GPS.
En fusionnant les données du gyroscope, de l’accéléromètre et du magnétomètre à l’aide de filtres robustes, tels que l’algorithme de Kalman, l’INS permet une navigation fiable dans des conditions de absence de GNSS. Si les INS basés sur la technologie MEMS sont bien adaptés aux RPA compacts, les systèmes de navigation répondent quant à eux aux besoins tactiques, maritimes et de défense.
Comment fonctionnent les systèmes de navigation inertielle ?
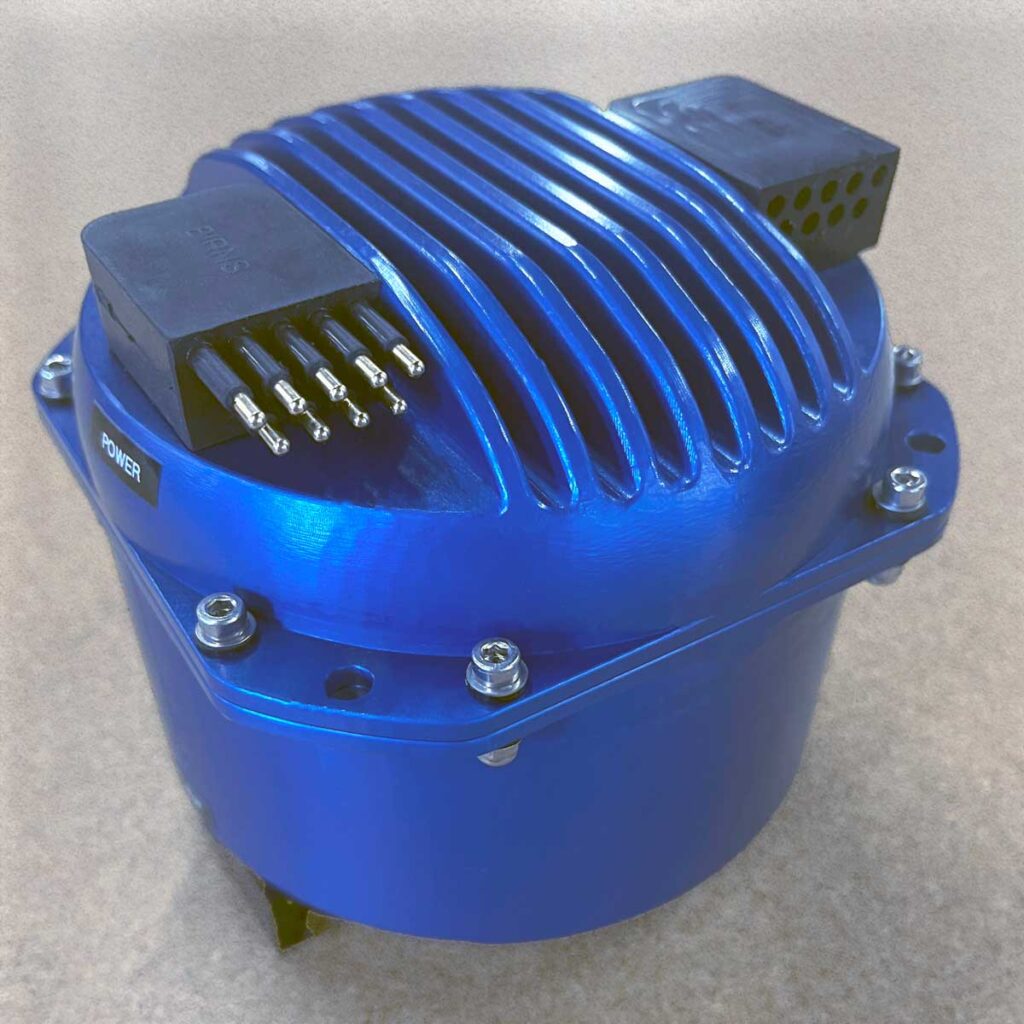
Navigateur inertiel/GNSS HGuide o480, de Honeywell.
Un INS s’appuie sur un réseau de capteurs inertiels, de gyroscopes, d’accéléromètres et souvent de magnétomètres pour calculer en temps réel la position et l’orientation par estimation. Les gyroscopes mesurent la vitesse angulaire (cap, roulis, tangage), tandis que les accéléromètres enregistrent l’accélération linéaire sur plusieurs axes. Les magnétomètres fournissent des références de cap alignées sur le champ magnétique terrestre afin d’atténuer la dérive.
Ces mesures brutes sont traitées à l’aide d’algorithmes informatiques, tels que les filtres de Kalman, qui fusionnent les lectures des capteurs, les entrées de référence (comme le GNSS lorsqu’il est disponible) et la dynamique inertielle, afin d’obtenir des estimations affinées des états de navigation. Cette fusion continue des capteurs corrige les biais, minimise la dérive et améliore la précision.
Composants principaux de l’INS
Gyroscopes (gyros)
Les gyroscopes sont essentiels aux systèmes de navigation inertielle, car ils mesurent la vitesse angulaire le long des axes de la plate-forme : tangage, roulis et lacet. Dans les plateformes sans pilote, en particulier les drones, les gyroscopes MEMS sont souvent utilisés en raison de leur taille compacte et de leur faible consommation d’énergie. Pour les applications nécessitant une plus grande précision, telles que les drones tactiques ou les véhicules sous-marins, les gyroscopes à fibre optique ou à laser en anneau offrent une stabilité nettement supérieure et des taux de dérive plus faibles. Les gyroscopes à fibre optique (FOG), en particulier, sont appréciés pour leur conception robuste, leur fiabilité à long terme et l’absence de pièces mobiles, ce qui les rend bien adaptés aux environnements difficiles ou dynamiques.
Accéléromètres
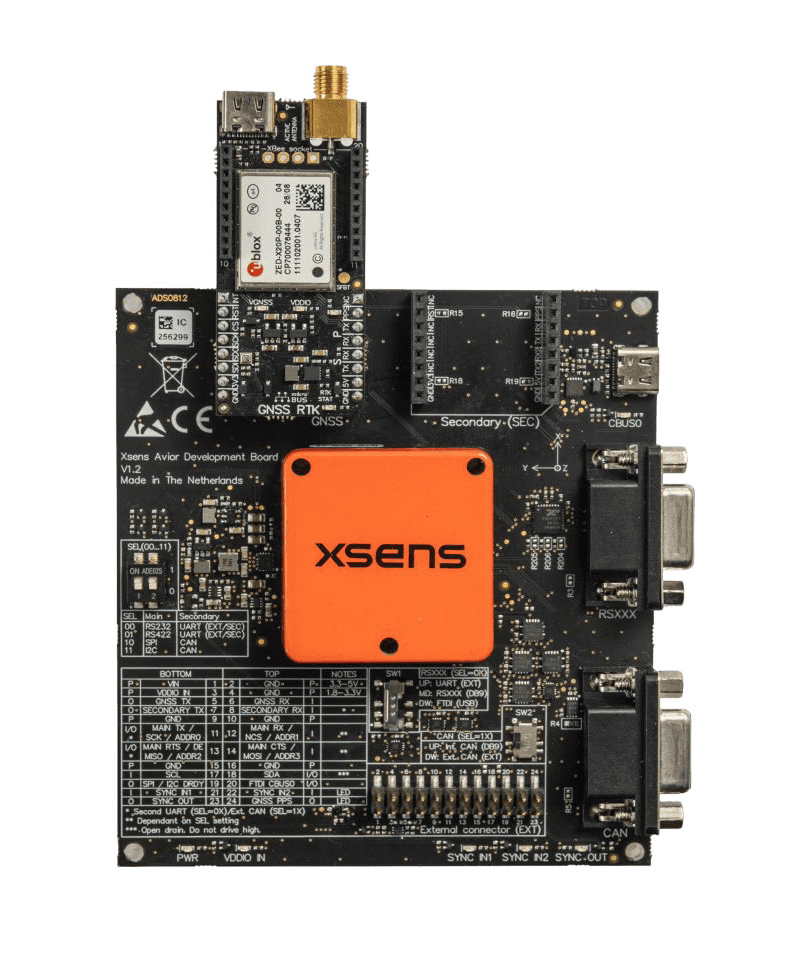
Système de navigation inertielle MEMS de GuideNav.
Les accéléromètres détectent l’accélération linéaire sur plusieurs axes, ce qui permet au système INS d’estimer les changements de vitesse et de déplacement. Les systèmes de navigation inertielle intègrent deux fois les données d’accélération pour calculer la position ; cependant, ce processus peut introduire des erreurs au fil du temps. Un filtrage avancé et une correction du biais sont utilisés pour atténuer la dérive. Les accéléromètres MEMS sont couramment utilisés dans les plateformes légères, tandis que les systèmes haute performance bénéficient de variantes plus sensibles et moins bruitées.
Magnétomètres
Les magnétomètres mesurent le champ magnétique terrestre afin de fournir des informations sur le cap. Ces capteurs agissent comme des boussoles numériques, offrant un point de référence global pour aider à atténuer la dérive de lacet dans les calculs inertiels. Cependant, ils sont sensibles aux interférences magnétiques, en particulier dans les environnements électriquement bruyants ou à proximité de matériaux ferreux. Malgré cela, les magnétomètres restent un composant clé de nombreux systèmes de navigation pour drones de petite et moyenne taille.
Récepteurs GNSS
Lorsqu’ils sont disponibles, les récepteurs GNSS améliorent considérablement les performances des INS en corrigeant les erreurs accumulées dans les estimations de position et de vitesse. De nombreuses configurations INS utilisent une intégration GNSS/INS étroitement couplés, avec des corrections RTK ou des modules GNSS à double antenne permettant une navigation de haute précision. Cela est particulièrement utile dans les applications nécessitant une précision de l’ordre du centimètre, telles que l’arpentage ou l’agriculture de précision.
Altimètres barométriques
Pour le positionnement vertical, les altimètres barométriques offrent une alternative ou un complément à l’altitude dérivée du GNSS. Ces capteurs déduisent l’altitude en mesurant la pression atmosphérique, qui varie en fonction de la hauteur. Bien que soumises à des variations et à des conditions météorologiques variables, les données barométriques peuvent être stabilisées grâce à un étalonnage périodique ou à une fusion avec les estimations GNSS et inertielles.
Logiciels de calcul intégrés
Les systèmes INS s’appuient sur des logiciels intégrés pour traiter les données des capteurs en temps réel. Les filtres de Kalman, en particulier les filtres de Kalman étendus (EKF), sont les algorithmes de fusion les plus courants. Ils combinent les données inertielles avec des entrées externes pour affiner les estimations de navigation. Les logiciels doivent tenir compte de la dérive des capteurs, des changements environnementaux et des contraintes de traitement en temps réel, en particulier dans les environnements hautement dynamiques ou dépourvus de GNSS.
Types d’INS pour les plateformes sans pilote
INS de navigation
Les INS de navigation (également appelés INS conventionnels ou autonomes) utilisent des capteurs de haute qualité, tels que des gyroscopes laser en anneau (RLG) ou des gyroscopes à fibre optique (FOG), ainsi que des accéléromètres de précision. Ces systèmes sont capables de fournir des données de position et d’orientation très précises sur de longues périodes sans entrée externe ; cependant, ils sont généralement volumineux, coûteux et gourmands en énergie. Ils sont utilisés dans l’aérospatiale, les sous-marins et d’autres plateformes critiques où la fiabilité à long terme est essentielle.
INS MEMS autonome
L’INS MEMS utilise des gyroscopes et des accéléromètres à systèmes microélectromécaniques (MEMS). Ces systèmes sont nettement plus petits, plus légers et plus économes en énergie, ce qui les rend idéaux pour les drones, l’électronique grand public et les plateformes portables. Cependant, ils souffrent généralement de taux de dérive plus élevés et d’une précision moindre au fil du temps par rapport aux systèmes de navigation.
INS tactiques/militaires
Les INS tactiques comblent le fossé entre les systèmes MEMS et les systèmes de navigation. Ils utilisent des capteurs inertiels de qualité supérieure avec une stabilité de biais améliorée et une dérive réduite. Ces systèmes sont utilisés dans les drones militaires, les véhicules terrestres et certaines applications industrielles qui nécessitent une meilleure précision sans le coût ou l’encombrement d’un INS de qualité navigation complète.
Systèmes INS assistés par GNSS (GNSS/INS)
Les systèmes GNSS/INS ou INS intégrés fusionnent les données inertielles avec les données GNSS (système mondial de navigation par satellite) afin de corriger la dérive et d’améliorer la précision au fil du temps. Ces systèmes hybrides sont courants dans les applications commerciales et militaires, en particulier lorsque des pertes intermittentes du signal GNSS sont à prévoir, comme dans les canyons urbains, sous la canopée ou dans des environnements contestés.
Autres véhicules sans pilote
UGV (véhicules terrestres sans pilote)
L’INS prend en charge l’odométrie dans des conditions où les codeurs de roue deviennent peu fiables, par exemple en cas de glissement ou de transition de terrain. Il fonctionne en conjonction avec des caméras, des systèmes de vision par ordinateur, des LiDAR et des systèmes de gestion de véhicules afin d’améliorer la navigation et l’autonomie globales.
USV et navires de surface autonomes
L’INS fournit le cap et la position dans les environnements maritimes. Associé aux systèmes GNSS et aux compas, il facilite la navigation en haute mer, les levés offshore et la stabilisation des navires.
UUV et AUV (véhicules sous-marins)
Ils fonctionnent souvent en immersion, où le GNSS n’est pas disponible. L’INS est essentiel, utilisant des capteurs inertiels, des DVL (lochs Doppler), des sondeurs, des sonars et des altimètres à pression pour la navigation sous-marine.
Performances de l’INS
Les performances d’un système de navigation inertielle sont généralement évaluées en fonction de sa précision d’attitude, de sa dérive de position et de sa stabilité dans le temps. Les systèmes haut de gamme, tels que ceux utilisés dans les drones tactiques ou les plateformes maritimes, peuvent maintenir une orientation à moins de 0,1 degré et limiter la dérive de position à moins d’un mètre par heure. En revanche, les systèmes compacts basés sur la technologie MEMS pour les petits drones ont généralement une précision de 0,5 à 1 degré, mais présentent des taux de dérive plus élevés. D’autres facteurs importants incluent la fréquence de mise à jour du système, la stabilité du biais et la capacité à maintenir une altitude précise, en particulier lorsque les signaux GNSS sont faibles ou indisponibles. Ces paramètres sont essentiels lors du choix d’un INS pour des applications qui exigent une navigation précise et ininterrompue.
Défis d’intégration et meilleures pratiques
Le choix des capteurs doit tenir compte de la taille, du poids, de la puissance et du coût en fonction des contraintes de la plate-forme. Les drones de petite taille utilisent généralement des capteurs MEMS, tandis que les systèmes plus grands ou critiques peuvent intégrer des IMU de qualité tactique. L’étalonnage est essentiel pour corriger la dérive thermique, le désalignement mécanique et les influences des vibrations. Le logiciel doit être robuste et capable d’exécuter un filtrage à haute fréquence (par exemple, EKF) en temps réel afin de combiner les données provenant des capteurs inertiels, du GNSS et, éventuellement, des systèmes de vision ou LiDAR.
Pour les opérations sans GNSS, les systèmes doivent être capables de passer en mode autonome et de gérer les erreurs, tandis que les missions de longue durée nécessitent une navigation à très faible dérive et une modélisation précise des conditions dynamiques. Des considérations réglementaires peuvent également exiger la certification du système, en particulier dans les applications de défense, aérospatiales ou maritimes.
INS vs GPS
Les systèmes GNSS/INS offrent des performances optimales en fusionnant le positionnement par satellite avec des estimations inertielles, en corrigeant la dérive et en augmentant la fiabilité. Les INS purs, bien que résistants au brouillage et aux obstructions, souffrent d’une accumulation d’erreurs au fil du temps. Les approches hybrides, en particulier les architectures étroitement couplées, permettent le traitement simultané des données GNSS brutes et des données IMU dans des algorithmes de filtrage, ce qui améliore les performances dans les environnements difficiles.
Considérations informatiques
Les logiciels de navigation inertielle doivent traiter les entrées des capteurs avec une latence minimale pour garantir une navigation précise. Un filtrage Kalman en temps réel, fonctionnant généralement à une fréquence de 50 à 200 Hz, est nécessaire pour maintenir une navigation réactive. Les systèmes avancés intègrent des capteurs supplémentaires, tels que le LiDAR, la vision et le radar, afin d’améliorer la perception spatiale et la précision, en particulier dans les environnements où le GNSS est indisponible ou peu performant. Le choix du processeur embarqué et de l’architecture du système a une influence significative sur les performances du système, en particulier lorsque la charge de calcul doit être maintenue à un niveau faible.
Applications
La navigation inertielle est essentielle dans la cartographie de précision et la topographie aérienne, où les systèmes INS assistés par GNSS avec RTK GNSS offrent une précision de l’ordre du centimètre. Dans le cadre de la livraison par drone et de l’inspection, un INS robuste maintient la stabilité et le contrôle du vol, même dans des zones encombrées ou obstruées. Dans le domaine maritime, les USV et les AUV s’appuient sur l’INS pour garantir la fiabilité du cap, de la profondeur et de la stabilisation dans des conditions maritimes dynamiques. Les applications tactiques et de défense nécessitent des systèmes de haute précision, résistants au brouillage, capables de maintenir l’orientation et la position avec un minimum d’apports externes.
Performances de niveau mission
Si l’intégration du GNSS améliore les performances globales, l’INS seul est essentiel pour les opérations dans des environnements où le GNSS est indisponible, tels que les espaces intérieurs, sous-marins, les canyons urbains ou dans des conditions de brouillage. Les systèmes INS vont des solutions MEMS économiques pour les petits drones aux unités de navigation hautement stables utilisées dans les applications de défense, maritimes et tactiques. Il est essentiel de comprendre les spécifications des capteurs, les comportements de dérive, les algorithmes de filtrage et les stratégies d’intégration pour obtenir des performances de navigation de niveau mission.