Encuentre proveedores y fabricantes de vehículos marinos no tripulados; vehículos de superficie no tripulados (USV), vehículos de superficie autónomos (ASV), vehículos submarinos no tripulados (UUV), vehículos submarinos autónomos (AUV) y vehículos operados a distancia (ROV), para aplicaciones tácticas, industriales y marítimas.
Si diseñas, construyes o suministras Vehículos marinos no tripulados, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
Los vehículos marinos no tripulados son vehículos robóticos que pueden desplazarse por la superficie o bajo el agua sin ningún operador humano a bordo. Pueden controlarse de forma remota, funcionar de forma autónoma o combinar ambas modalidades.
Embarcaciones de superficie no tripuladas
Los buques de superficie no tripulados (USV) se utilizan para diversas operaciones marítimas, entre ellas, ISR (inteligencia, vigilancia y reconocimiento) militar, cartografía, investigación científica y vigilancia medioambiental. Pueden ser diseños únicos o basarse en embarcaciones tripuladas que se han adaptado para permitir su funcionamiento a distancia.
Las USV pueden estar equipadas con una gama de sensores y cargas útiles diferentes, como radares, sonares, sensores químicos, muestreadores de agua y armamento. Los USV autónomos, también conocidos como ASV (buques de superficie autónomos), pueden tener capacidades de inteligencia artificial marina que les ayudan en la navegación autónoma y en la prevención de colisiones.
Vehículos autónomos no tripulados de superficie de Seafloor Systems
Vehículos submarinos no tripulados
Los vehículos submarinos no tripulados (UUV) se pueden dividir a grandes rasgos en dos categorías generales: ROV (vehículos operados a distancia) y AUV (vehículos submarinos autónomos).
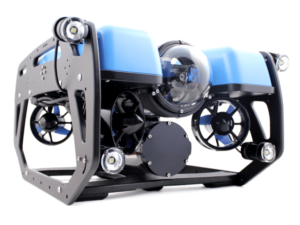
ROV
ROV configurable BlueROV2 de Blue Robotics
Los vehículos operados a distancia (ROV) se controlan directamente de forma remota a través de un cable desde la costa o desde un buque de apoyo, lo cual es necesario debido a la dificultad de propagar ondas de radio bajo el agua. El cable proporciona energía y permite la comunicación entre el vehículo y el operador.
Los ROV suelen clasificarse en varias categorías según su tamaño. Los más grandes se conocen como ROV de clase de trabajo, que pueden operar a profundidades de miles de metros. Los ROV de clase de observación o inspección son más pequeños que los ROV de clase de trabajo, y los más pequeños se conocen como mini o micro ROV y suelen ser portátiles para una sola persona.
Los ROV se utilizan tanto para aplicaciones militares como civiles, incluyendo la inspección de tuberías y plataformas marinas, contramedidas contra minas y monitoreo ambiental.
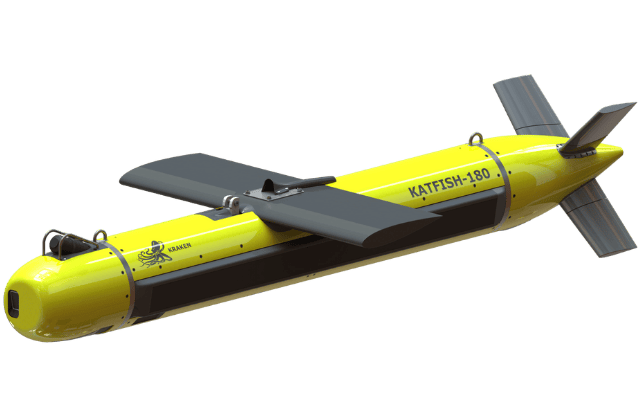
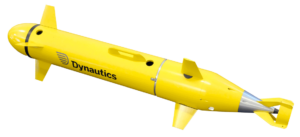
AUV
AUV Phantom de Dynautics
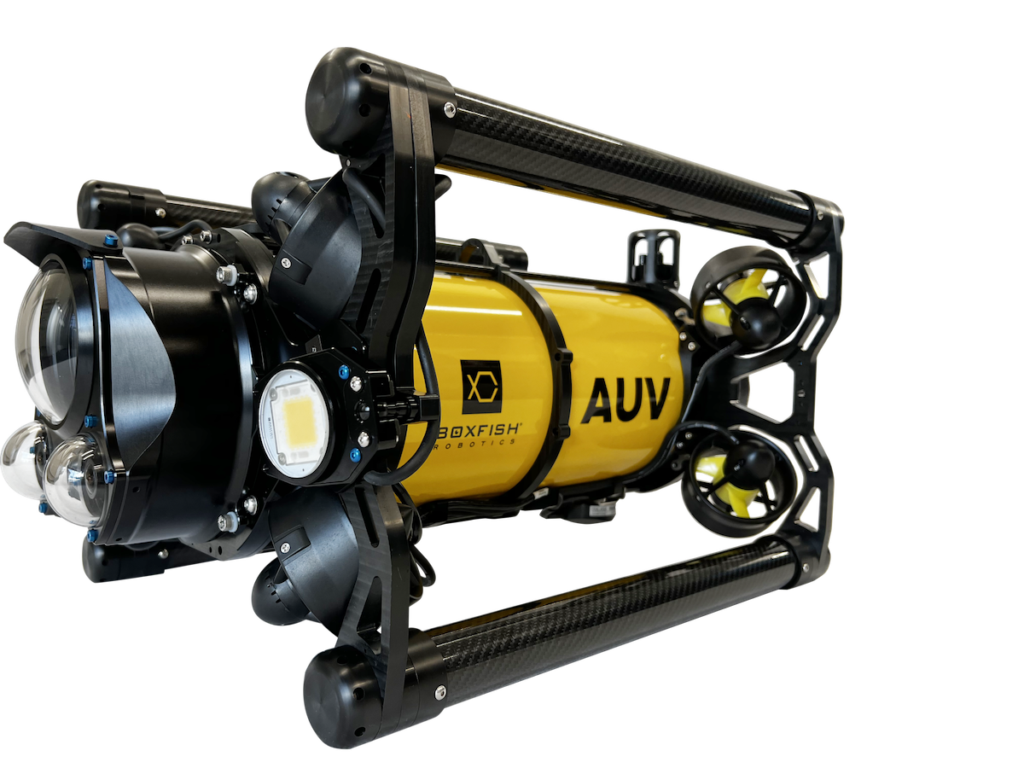
Los vehículos autónomos no tripulados (AUV) pueden funcionar sin control directo en tiempo real y son capaces de llevar a cabo misiones de larga duración, de muchos meses. Pueden seguir una serie de puntos de referencia preprogramados o utilizar inteligencia artificial para operar con un mayor grado de libertad en su toma de decisiones.
La mayoría de los AUV funcionan con baterías y utilizan propulsores para desplazarse. Algunos, conocidos como planeadores submarinos, utilizan cambios en la flotabilidad para variar su profundidad y suelen utilizarse para misiones de muestreo o supervisión muy regulares. Otras aplicaciones de los AUV son la guerra antisubmarina, la cartografía del lecho marino y la prospección de petróleo y gas.