Encuentre proveedores y fabricantes de vehículos submarinos no tripulados; UUV, AUV, ROV y planeadores submarinos para aplicaciones de prospección, investigación y militares.
Si diseñas, construyes o suministras Vehículos submarinos no tripulados UUV, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
Los vehículos submarinos no tripulados, o UUV, también conocidos como vehículos submarinos autónomos, son vehículos capaces de operar sumergidos bajo el agua sin necesidad de que un ser humano ocupe físicamente el vehículo. Se pueden dividir en dos categorías principales: vehículos operados a distancia (ROV) y vehículos submarinos autónomos (AUV).
Vehículos submarinos autónomos (AUV)
Los vehículos submarinos autónomos son capaces de funcionar sin el control en tiempo real de un operador humano. Pueden programarse para recopilar datos a lo largo de una ruta predeterminada y algunos son capaces de tomar decisiones y, potencialmente, cambiar los parámetros de su misión en función de los datos recibidos.
Debido a la atenuación de las ondas de radio en el agua, los AUV no pueden depender de la navegación GPS directa una vez sumergidos. Se puede utilizar la navegación por estima para establecer una estimación de la posición, aunque los errores se acumulan rápidamente. Esta estimación de la posición puede mejorarse aún más con datos adicionales de transpondedores acústicos submarinos, posiciones GPS de referencias superficiales cercanas o salidas temporales a la superficie para establecer una posición GPS. Las estimaciones de aceleración y velocidad se pueden calcular utilizando una unidad de medición inercial y mejorar con un registro de velocidad Doppler, un dispositivo similar a un sonar que mide la velocidad de desplazamiento sobre el fondo marino.
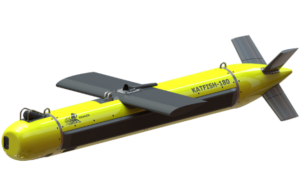
Phantom 2 UUV/AUV de Dynautics
Métodos de propulsión para los AUV
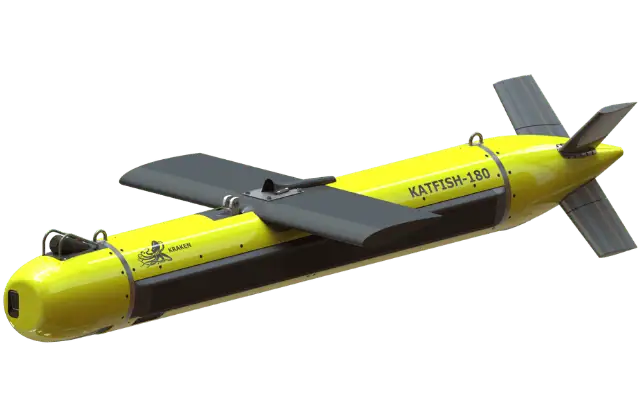
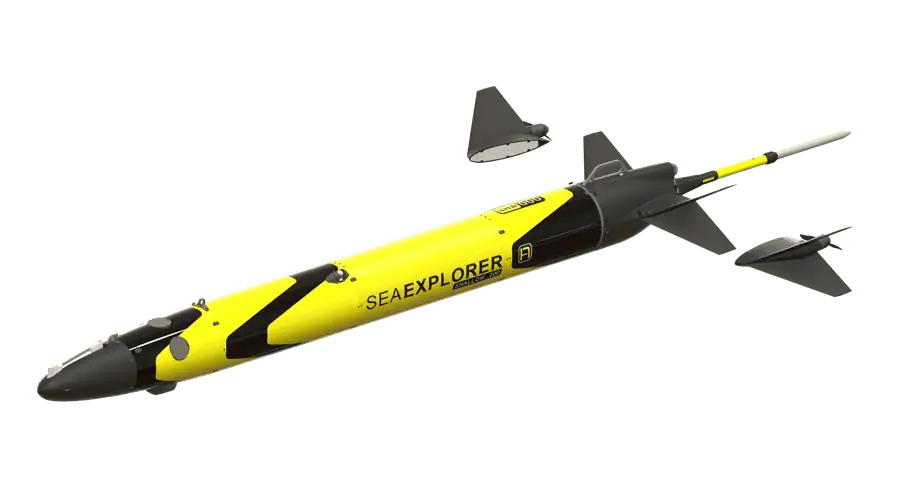
Los métodos de propulsión más comunes para los AUV son los propulsores basados en hélices y las toberas Kort, normalmente accionados por motores eléctricos. Los AUV también pueden «deslizarse» por el agua, cambiando la flotabilidad, los planeadores submarinos son capaces de alterar su profundidad y utilizan alas aerodinámicas para convertir este movimiento en movimiento hacia adelante.
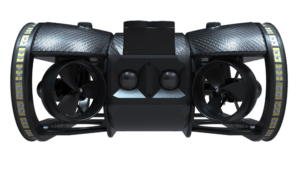
ecoSUBm-Power+ v2 AUV de ecoSUB Robotics
Los AUV se utilizan ampliamente para la prospección en la industria del petróleo y el gas y en la investigación científica. También se utilizan para aplicaciones de defensa naval, como la detección de minas, la entrega de cargas útiles y la vigilancia. Los AUV militares se han conectado en red con los UAV (vehículos aéreos no tripulados) para proporcionar una solución ISR (inteligencia, vigilancia y reconocimiento) entre dominios para el campo de batalla.
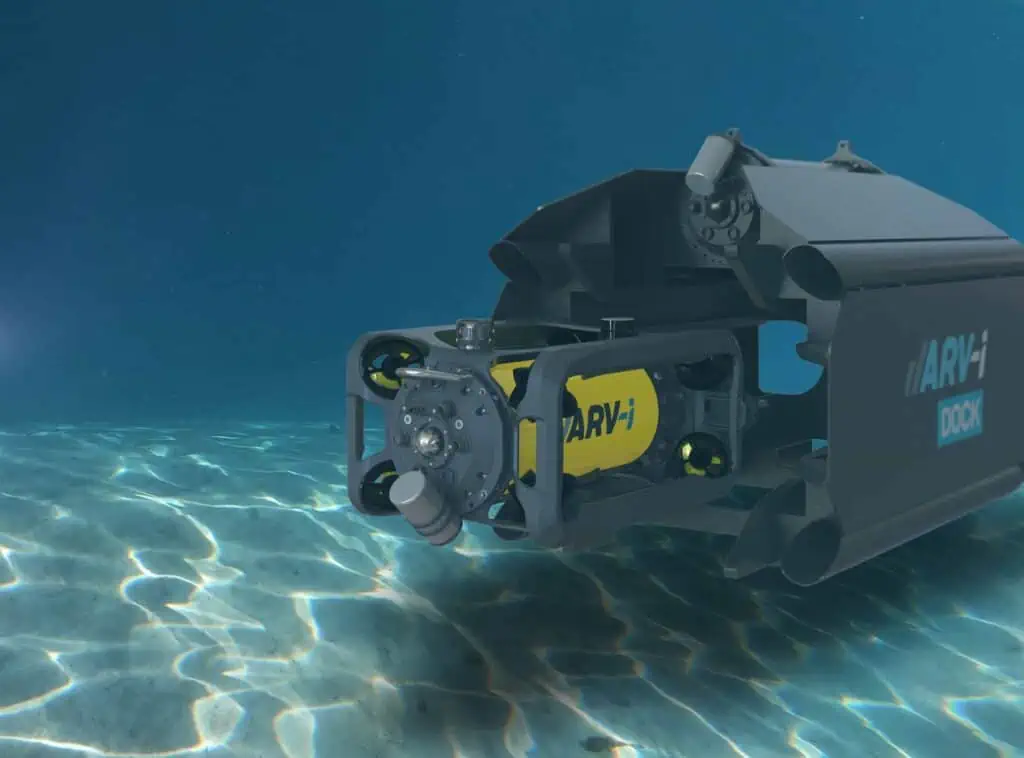
A diferencia de los AUV, los ROV no pueden funcionar sin el control en tiempo real de un operador humano. Los ROV se desarrollaron para superar las limitaciones de los buzos humanos y los vehículos de buceo tripulados. Son operados de forma remota por una tripulación a bordo de un buque cercano y conectados a su base de operaciones a través de un cable umbilical que proporciona tanto una amarra como una conexión de alimentación, comunicaciones y datos. Los ROV que operan en aguas más profundas o turbulentas también están equipados con un sistema de gestión de amarre (TMS), que regula la longitud del amarre para minimizar los efectos de la resistencia subacuática sobre el cable.
Los ROV se pueden dividir en diferentes clases según su tamaño, peso o función. Existen varios sistemas de clasificación diferentes.
Vehículos de observación o inspección
Los ROV más pequeños se conocen a menudo como vehículos de observación o inspección, y los más simples pueden llevar solo una cámara. Los vehículos más sofisticados de esta clase también pueden estar equipados con sonares y otros sensores. Las profundidades operativas típicas pueden oscilar entre varios cientos y varios miles de pies, dependiendo del tamaño del vehículo.
ROV de trabajo
En el otro extremo del espectro se encuentran los ROV de clase de trabajo. Estos están equipados con una bomba hidráulica para proporcionar la potencia adicional necesaria para equipos adicionales y para la propulsión a mayor profundidad.
Los ROV de clase de trabajo pueden manejar equipos más potentes, como manipuladores y tendidores de cables. Los vehículos de esta clase han sido diseñados para operar a profundidades de hasta 30 000 pies e incluso superiores.