Finden Sie Lieferanten und Hersteller von unbemannten Unterwasserfahrzeugen, UUV, AUV, ROV und Unterwassergleitern für Vermessungs-, Forschungs- und militärische Anwendungen.
Innovative hochauflösende Unterwasserbildgebung und Energietechnologien für kommerzielle, wissenschaftliche und militärische Unterwasservermessungsmissionen
Wenn Sie entwerfen, bauen oder liefern Unbemannte Unterwasserfahrzeuge (UUV), Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
Unbemannte Unterwasserfahrzeuge, auch bekannt als UUVs (Unmanned Undersea Vehicles), sind Fahrzeuge, die unter Wasser operieren können, ohne dass ein Mensch physisch im Fahrzeug anwesend sein muss. Sie lassen sich in zwei Hauptkategorien unterteilen: ferngesteuerte Fahrzeuge (ROVs) und autonome Unterwasserfahrzeuge (AUVs).
Autonome Unterwasserfahrzeuge (AUVs)
Autonome Unterwasserfahrzeuge sind in der Lage, ohne Echtzeitsteuerung durch einen menschlichen Bediener zu funktionieren. Sie können so programmiert werden, dass sie Daten entlang einer vorgegebenen Route sammeln, und einige sind in der Lage, Entscheidungen zu treffen und ihre Missionsparameter entsprechend den empfangenen Daten zu ändern.
Aufgrund der Abschwächung von Funkwellen im Wasser können sich AUVs unter Wasser nicht auf die direkte GPS-Navigation verlassen. Die Positionsbestimmung kann anhand von Koppelnavigation erfolgen, wobei sich jedoch schnell Fehler summieren. Diese Positionsschätzung kann durch zusätzliche Daten von Unterwasser-Akustik-Transpondern, GPS-Positionen von nahe gelegenen Oberflächenreferenzen oder durch vorübergehendes Auftauchen zur Ermittlung einer GPS-Position weiter verbessert werden. Beschleunigungs- und Geschwindigkeitsschätzungen können mit einer inertialen Messeinheit berechnet und mit einem Doppler-Geschwindigkeitslog verbessert werden, einem sonarähnlichen Gerät, das die Geschwindigkeit über den Meeresboden misst.
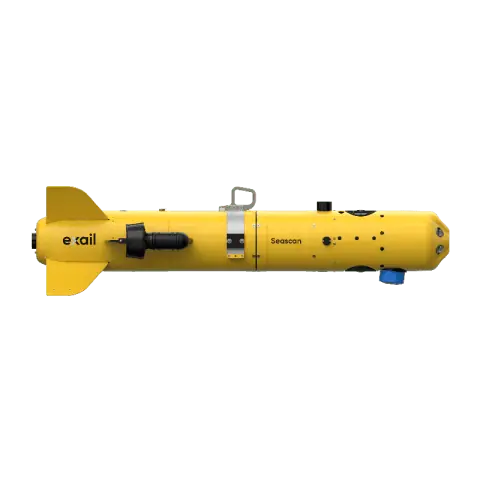
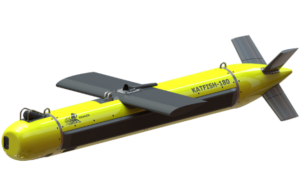
Phantom 2 UUV/AUV von Dynautics
Antriebsmethoden für AUVs
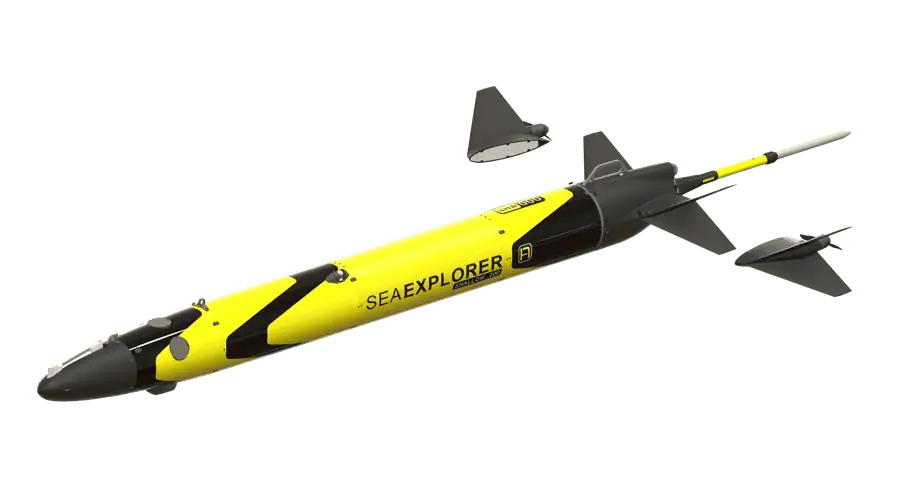
Die gängigsten Antriebsmethoden für AUVs sind propellerbasierte Triebwerke und Kort-Düsen, die in der Regel von Elektromotoren angetrieben werden. AUVs können auch durch das Wasser „gleiten“ – indem sie ihren Auftrieb verändern. Unterwassergleiter können ihre Tiefe verändern und mithilfe von Tragflächen diese Bewegung in Vorwärtsbewegung umwandeln.
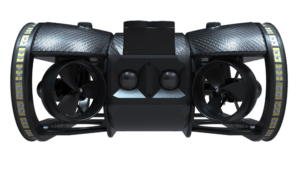
ecoSUBm-Power+ v2 AUV von ecoSUB Robotics
AUVs werden in großem Umfang für Vermessungszwecke in der Öl- und Gasindustrie sowie in der wissenschaftlichen Forschung eingesetzt. Sie werden auch für Anwendungen im Bereich der Marineverteidigung wie Minensuche, Transport von Nutzlasten und Überwachung verwendet. Militärische AUVs wurden mit UAVs (unbemannte Luftfahrzeuge) vernetzt, um eine domänenübergreifende ISR-Lösung (Intelligence, Surveillance and Reconnaissance) für das Schlachtfeld bereitzustellen.
Im Gegensatz zu AUVs können ROVs ohne Echtzeitsteuerung durch einen menschlichen Bediener nicht funktionieren. ROVs wurden entwickelt, um die Einschränkungen von menschlichen Tauchern und bemannten Tauchfahrzeugen zu überwinden. Sie werden von einer Besatzung an Bord eines nahe gelegenen Schiffes ferngesteuert und sind über eine Versorgungsleitung, die sowohl als Verbindung als auch als Strom-, Kommunikations- und Datenverbindung dient, mit ihrer Operationsbasis verbunden. ROVs, die in tieferen oder raueren Gewässern eingesetzt werden, sind zusätzlich mit einem Tether Management System (TMS) ausgestattet, das die Länge des Kabels reguliert, um die Auswirkungen des Unterwasserwiderstands auf das Kabel zu minimieren.
ROVs können je nach Größe, Gewicht oder Funktion in verschiedene Klassen unterteilt werden. Es gibt mehrere unterschiedliche Klassifizierungsschemata.
Fahrzeuge der Beobachtungs- oder Inspektionsklasse
Die kleinsten ROVs werden oft als Fahrzeuge der Beobachtungs- oder Inspektionsklasse bezeichnet, von denen die einfachsten nur mit einer einzigen Kamera ausgestattet sind. Komplexere Fahrzeuge dieser Klasse können auch mit Sonar und anderen Sensoren ausgestattet sein. Die typischen Einsatztiefen reichen je nach Fahrzeuggröße von mehreren hundert bis zu mehreren tausend Fuß.
ROVs der Arbeitsklasse
Am anderen Ende des Spektrums befinden sich die Arbeits-ROVs. Diese sind mit einer Hydraulikpumpe ausgestattet, um die zusätzliche Leistung bereitzustellen, die für zusätzliche Ausrüstung und für den Antrieb in größeren Tiefen erforderlich ist.
Arbeits-ROVs sind in der Lage, leistungsstärkere Geräte wie Manipulatoren und Kabelverleger zu betreiben. Fahrzeuge dieser Klasse wurden für den Einsatz in Tiefen von bis zu 30.000 Fuß und sogar darüber hinaus entwickelt.