Unidades de medición inercial (IMU) para drones y sistemas no tripulados
Las unidades de medición inercial (IMU) para drones y sistemas no tripulados proporcionan los datos inerciales de alta velocidad necesarios para estabilizar los UAV, UGV, USV y ROV, lo que permite una navegación precisa en entornos dinámicos. Combinando acelerómetros, giroscopios y magnetómetros, estos subsistemas proporcionan la actitud, la velocidad angular, la vibración y las estimaciones derivadas esenciales para los pilotos automáticos, la estabilización de la carga útil y el funcionamiento sin GNSS.
Esta categoría presenta a los fabricantes de IMU industriales, tácticas y de grado de navegación que utilizan tecnologías MEMS, Quartz y FOG para equilibrar el rendimiento SWaP y la deriva en plataformas no tripuladas.
Si diseñas, construyes o suministras Unidades de medición inercial (IMU), Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
Unidades de medición inercial (IMU) para drones y sistemas no tripulados
Resumen por
William Mackenzie
Actualizado:
Introducción a las unidades de medición inercial (IMU) para drones y sistemas no tripulados
Las unidades de medición inercial (IMU) son dispositivos sofisticados que proporcionan los datos deterministas esenciales para la estabilización, la orientación, la cartografía y el control de precisión. Ya sea integrada en un vehículo aéreo no tripulado (UAV) multirrotor, un vehículo submarino autónomo (AUV) o un vehículo terrestre no tripulado (UGV) táctico, una IMU informa continuamente de la velocidad angular y la aceleración lineal. Cuando se complementa con un magnetómetro, proporciona indicaciones cruciales sobre el rumbo.
Estos datos permiten a los ordenadores de a bordo inferir con precisión la actitud y el estado de movimiento actuales del vehículo, lo que garantiza un funcionamiento fiable incluso cuando los sensores externos se degradan o fallan momentáneamente. A medida que aumenta la complejidad operativa de las aplicaciones no tripuladas, la IMU sigue siendo posiblemente el componente más crítico de toda la cadena de control del vehículo.
Principios básicos de ingeniería de las unidades de medición inercial
En esencia, una unidad de medición inercial proporciona mediciones esenciales, de alta frecuencia y específicas de la plataforma que se incorporan a los bucles de control y navegación.
Qué mide una IMU
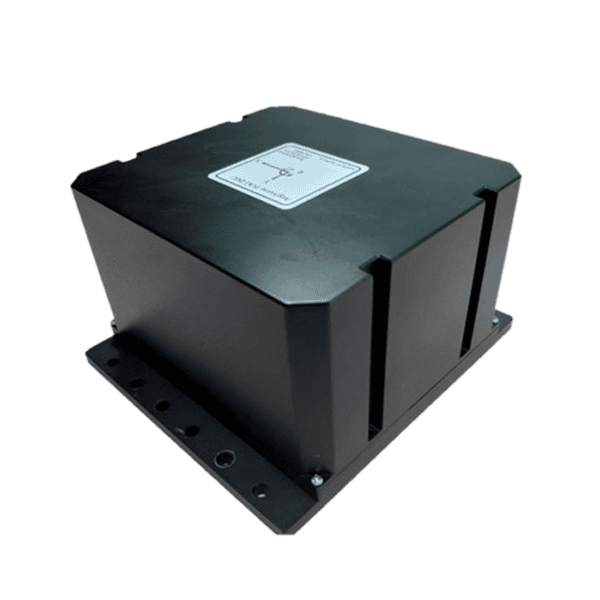
Unidad de medición inercial FI 200P de FIBERPRO
Las IMU modernas proporcionan continuamente un flujo de datos altamente fiable, crucial para los bucles de control rápido y las tareas de percepción de bajo nivel:
Aceleración lineal en tres ejes: Mide las fuerzas específicas de la plataforma utilizadas para inferir la velocidad y el movimiento.
Velocidad angular en tres ejes (giroscopio): Permite al sistema de control mantener una actitud estable y amortiguar las perturbaciones rotacionales.
Campo magnético de tres ejes (magnetómetro): cuando se configura como un sistema de referencia de actitud y rumbo (AHRS), permite la corrección del rumbo a largo plazo.
Cantidades derivadas: A menudo incluyen estimaciones de actitud, intensidad de vibración y posición/velocidad cuando se fusionan dentro de un sistema de navegación inercial (INS) completo.
Aplicaciones de las IMU en sistemas no tripulados
IMU para UAV
En los UAV, la unidad de medición inercial es fundamental para el control y la navegación. Proporciona los datos de actitud y rotación necesarios para los bucles de control PID y la estabilización a alta velocidad, compensando las turbulencias del flujo de aire y las vibraciones de la propulsión. La baja latencia del giroscopio es imprescindible para la estabilidad de la aeronave.
Para los vuelos sin GNSS, los UAV que operan en funciones de inteligencia, vigilancia y reconocimiento (ISR) o en entornos conflictivos dependen de las IMU para la navegación inercial sostenida, el mantenimiento de la geometría de la formación y el vuelo estacionario VTOL fiable.
Además, estos sensores pueden estabilizar las cargas útiles EO/IR (electroópticas/infrarrojas) y de cartografía, manteniendo una línea de visión estable y proporcionando una retroalimentación de alta velocidad para los motores cardánicos.
IMU para UGV
Los UGV dependen en gran medida de los datos inerciales cuando navegan por túneles, bosques densos o entornos de campo de batalla donde el GNSS está degradado o no existe. La fusión de odometría con codificadores de rueda y una compensación robusta del deslizamiento de las ruedas son esenciales para evitar la deriva durante la navegación en terrenos sin GPS.
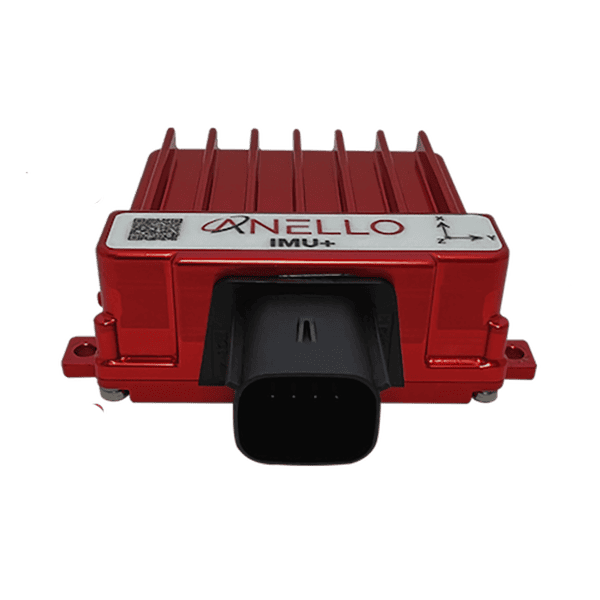
IMU HGuide HG4930 S-Class de Honeywell Aerospace
Para la conducción autónoma y la percepción, la IMU sincroniza los datos entre los canales de percepción LiDAR y de la cámara, proporcionando los datos de localización de alta velocidad necesarios para una planificación de ruta receptiva.
Es fundamental destacar que los UGV se enfrentan a un entorno hostil con altas vibraciones, temperaturas extremas y interferencias electromagnéticas procedentes de las radios, lo que exige carcasas IMU muy resistentes y soportes con aislamiento contra golpes.
IMU para vehículos submarinos
Los vehículos de superficie no tripulados (USV) requieren IMU para el rechazo del movimiento de las olas, la estimación precisa del rumbo y el balanceo/cabeceo, y la integración perfecta con los sistemas de piloto automático y radar marinos.
Los vehículos submarinos no tripulados (UUV), incluidos los AUV y los vehículos operados a distancia (ROV), dependen de los sensores inerciales más precisos para la estimación de su posición debido a la falta de señales GNSS. Las misiones dependen de la navegación por estima IMU + Doppler Velocity Log (DVL) y la fusión con sistemas acústicos LBL/USBL. Las misiones de AUV de alta gama suelen requerir sistemas IMU basados en FOG debido a la necesidad de realizar traslados sumergidos largos con baja deriva.
En el caso de los ROV, estas unidades proporcionan información en tiempo real para compensar las perturbaciones del movimiento inducidas por el cable y permiten un control preciso del manipulador y las herramientas submarinas.
Categorías de IMU y grados de sensores
El rendimiento de una unidad de medición inercial para aplicaciones de drones se clasifica normalmente en grados definidos, que reflejan un equilibrio entre el coste, el SWaP y la precisión.
IMU de grado industrial
Estos dispositivos proporcionan una estabilidad adecuada para UAV más pequeños, UGV portátiles y USV compactos. Representan un excelente equilibrio entre coste y rendimiento, y destacan en aplicaciones en las que las restricciones de peso y coste son primordiales, como los modelos de IMU para drones comerciales y las cargas útiles de cartografía de bajo coste.
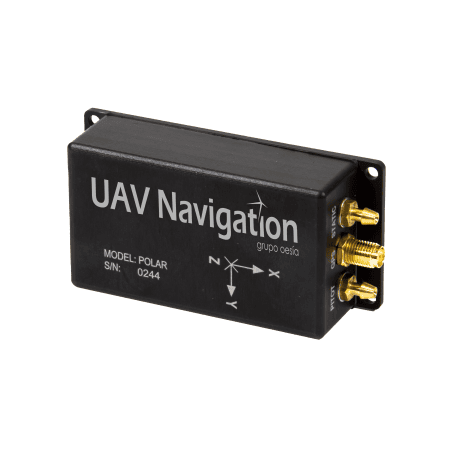
FOG IMU U121D de MostaTech
IMU de grado táctico
Las IMU de grado táctico ofrecen un salto significativo en rendimiento con respecto a los sensores de grado industrial, ya que reducen drásticamente la deriva y proporcionan una robustez ambiental mucho mayor. Por lo general, presentan una estabilidad de sesgo hasta dos órdenes de magnitud mejor que sus homólogos de menor coste.
Esta capacidad mejorada las hace esenciales para los sistemas de piloto automático de UAV de larga duración, la estabilización de carga útil EO/IR de alta precisión y las plataformas marítimas no tripuladas que requieren una estimación de movimiento más precisa. Para lograr esta precisión, estas IMU suelen aprovechar la tecnología FOG o sensores MEMS de cuarzo/silicio altamente refinados y compensados térmicamente.
IMU de grado de navegación
Las IMU de grado de navegación ofrecen una deriva extremadamente baja y una precisión a largo plazo sin necesidad de actualizaciones externas frecuentes. Aunque estas unidades son significativamente más grandes y costosas, permiten perfiles de misión que simplemente no son posibles con grados inferiores. Sus aplicaciones principales incluyen la navegación de AUV en misiones sumergidas largas y complejas, UGV de alta gama que operan en áreas sin GNSS y grandes UAV de defensa que requieren una navegación estimada precisa.
Sin embargo, es importante señalar que muchos AUV de gama alta suelen emplear sofisticados INS de grado táctico (a menudo basados en FOG) fusionados con DVL para lograr un rendimiento de grado de navegación en un formato optimizado para SWaP, en lugar de integrar una unidad de tamaño completo.
IMU especializadas y reforzadas
Para entornos operativos extremos, se necesitan diseños especializados. Las IMU para aguas profundas incorporan carcasas tolerantes a altas presiones, una construcción resistente a la corrosión y blindaje magnético para la navegación submarina. Las IMU resistentes a la radiación están diseñadas para entornos orbitales o de alta radiación en los que los componentes MEMS convencionales se degradarían rápidamente.
Subsistemas y componentes de IMU
La fiabilidad de cualquier unidad de medición inercial para drones y sistemas no tripulados proviene de la estrecha integración de sus componentes.
Acelerómetros y giroscopios
Los acelerómetros MEMS y los giroscopios dominan la mayoría de las aplicaciones no tripuladas debido a su excepcional equilibrio entre rendimiento, bajo SWaP (tamaño, peso y potencia) y rentabilidad.
Sensores de alta gama
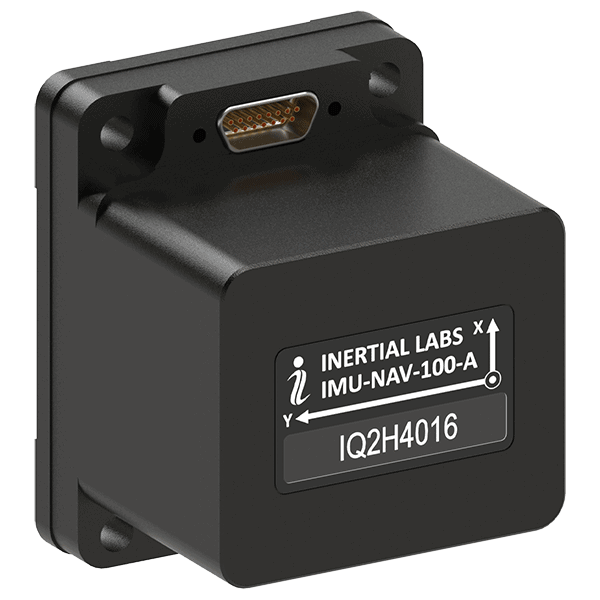
Motus Miniature MEMS IMU de Advanced Navigation
Para aplicaciones exigentes que requieren una deriva ultrabaja o un rendimiento de navegación ampliado, los dispositivos de mayor calidad emplean tecnología especializada. Esto incluye MEMS de cuarzo o giroscopios de fibra óptica (FOG), siendo estos últimos una opción habitual para los sistemas IMU y AUV tácticos de UAV debido a su rendimiento superior en un paquete con restricciones SWaP. Los giroscopios de láser en anillo (RLG) se reservan generalmente para plataformas estratégicas muy grandes.
Electrónica de apoyo
Esto incluye magnetómetros para una referencia de rumbo externa, procesadores integrados para realizar el filtrado y la compensación de temperatura/sesgo, y sofisticados modelos de calibración para eliminar los efectos de no linealidad.
Parámetros clave de rendimiento de la IMU
A la hora de especificar una IMU para drones, los ingenieros deben tener en cuenta una serie de parámetros técnicos que determinan el rendimiento en condiciones operativas:
Parámetro
Impacto en el rendimiento
Estabilidad del sesgo
Define la tasa de deriva mínima alcanzable. Es fundamental para misiones de larga duración.
Paseo aleatorio angular (ARW)
Cuantifica el ruido y determina la precisión de la actitud a corto plazo.
Ancho de banda y latencia
Determina la capacidad de respuesta. Fundamental para la estabilización a alta velocidad y los bucles de control (por ejemplo, en multirrotores).
Precisión del factor de escala
Determina la precisión con la que el sensor mide el movimiento en todo su rango dinámico.
Rango dinámico
La fuerza G o velocidad de rotación máxima que el sensor puede tolerar antes de saturarse.
Tolerancia a golpes y vibraciones
Mide la robustez frente al entorno operativo (por ejemplo, motores de UGV, turbulencias de hélices).
Tendencias emergentes en sensores IMU para drones
El futuro de la detección inercial está impulsado por requisitos cada vez mayores de autonomía y resistencia. El procesamiento de IA/Edge se aprovecha cada vez más en el procesador Edge de la IMU para la eliminación de ruido de la señal, la calibración inteligente y la odometría visual-inercial mejorada, con el fin de mejorar aún más la precisión y la resistencia sin aumentar el SWaP.
Estos crecientes requisitos de autonomía, especialmente en entornos conflictivos o totalmente autónomos, impulsarán la demanda de unidades inerciales con una resistencia aún mayor en entornos EM conflictivos, mayores velocidades de datos y un rendimiento de carga dinámica más sólido.
Además, las investigaciones emergentes en IMU cuánticas y fotónicas prometen ofrecer finalmente una precisión de grado de navegación en un perfil SWaP adecuado para pequeñas plataformas no tripuladas, lo que podría revolucionar la navegación de larga duración independiente del GNSS.