Sistemas de navegación inercial (INS) para drones y otras plataformas no tripuladas
Los sistemas de navegación inercial (INS) son un componente clave para permitir la navegación autónoma en drones y otros sistemas no tripulados. Mediante la medición continua de la rotación y la aceleración, los INS permiten un seguimiento preciso de la posición, la velocidad y la orientación, incluso cuando no se dispone de GPS u otras señales externas. A medida que los vehículos aéreos no tripulados (UAV), los vehículos terrestres no tripulados (UGV), los vehículos de superficie no tripulados (USV) y otras plataformas se vuelven cada vez más autónomos y se despliegan en entornos complejos, no se puede subestimar la importancia de contar con soluciones INS robustas.
Si diseñas, construyes o suministras Sistemas de navegación inercial (INS), Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
Sistemas de navegación inercial (INS) para drones y otras plataformas no tripuladas
Resumen por
Caroline Rees
Actualizado:
Los sistemas de navegación inercial (INS) permiten a los drones, los vehículos no tripulados y las plataformas marítimas posicionarse con precisión, incluso cuando falla el GPS.
Al fusionar los datos del giroscopio, el acelerómetro y el magnetómetro mediante filtros robustos, como el algoritmo de Kalman, el INS permite una navegación fiable en condiciones de denegación de GNSS. Mientras que los INS basados en MEMS son muy adecuados para los RPA compactos, los sistemas de navegación sirven para satisfacer las necesidades tácticas, marítimas y de defensa.
¿Cómo funcionan los sistemas de navegación inercial?
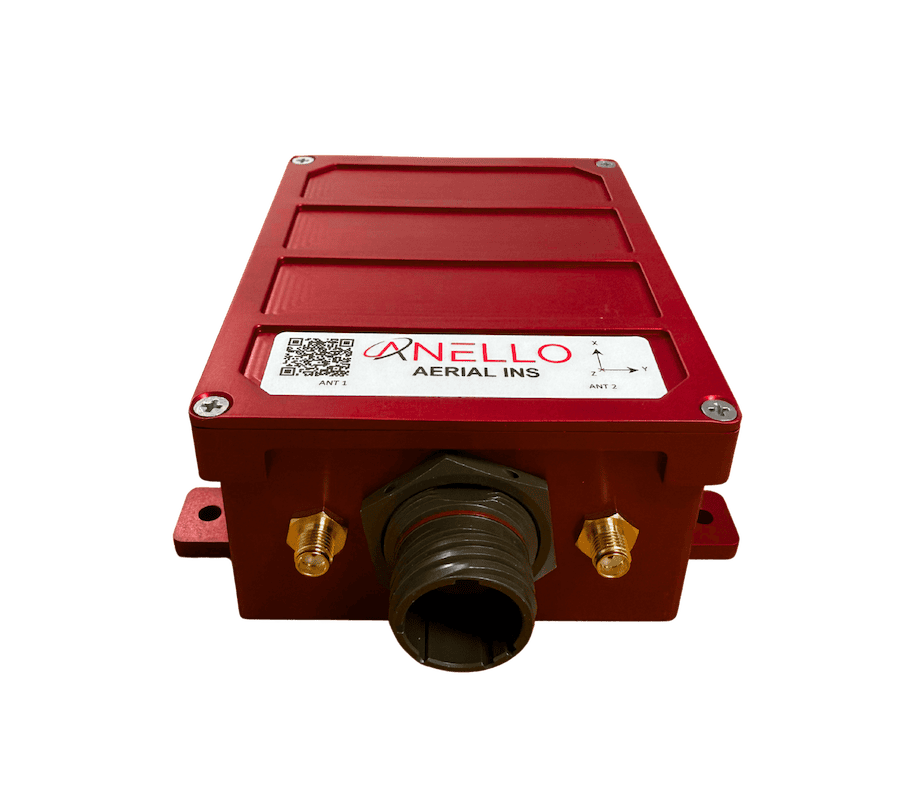
Navegador inercial/GNSS HGuide o480, de Honeywell.
Un INS se basa en una red de sensores inerciales, giroscopios, acelerómetros y, a menudo, magnetómetros, para calcular la posición y la orientación en tiempo real mediante navegación estimada. Los giroscopios miden la velocidad angular (rumbo, balanceo, cabeceo), mientras que los acelerómetros registran la aceleración lineal en múltiples ejes. Los magnetómetros proporcionan referencias de rumbo alineadas con el campo magnético de la Tierra para mitigar la deriva.
Estas mediciones brutas se procesan mediante algoritmos computacionales, como los filtros de Kalman, que fusionan las lecturas de los sensores, las entradas de referencia (como el GNSS, cuando está disponible) y la dinámica inercial, lo que da como resultado estimaciones refinadas de los estados de navegación. Esta fusión continua de sensores corrige los sesgos, minimiza la deriva y mejora la precisión.
Componentes básicos del INS
Giroscopios (giroscopios)
Los giroscopios son esenciales para los sistemas de navegación inercial, ya que miden la velocidad angular a lo largo de los ejes de la plataforma: cabeceo, balanceo y guiñada. En las plataformas no tripuladas, especialmente en los drones, se suelen utilizar giroscopios MEMS debido a su tamaño compacto y su bajo consumo de energía. Para aplicaciones de mayor precisión, como en los UAV tácticos o los vehículos submarinos, los giroscopios de fibra óptica o de láser en anillo proporcionan una estabilidad significativamente mayor y menores tasas de deriva. Los giroscopios de fibra óptica (FOG), en particular, son muy apreciados por su diseño resistente, su fiabilidad a largo plazo y la ausencia de piezas móviles, lo que los hace muy adecuados para entornos difíciles o dinámicos.
Acelerómetros
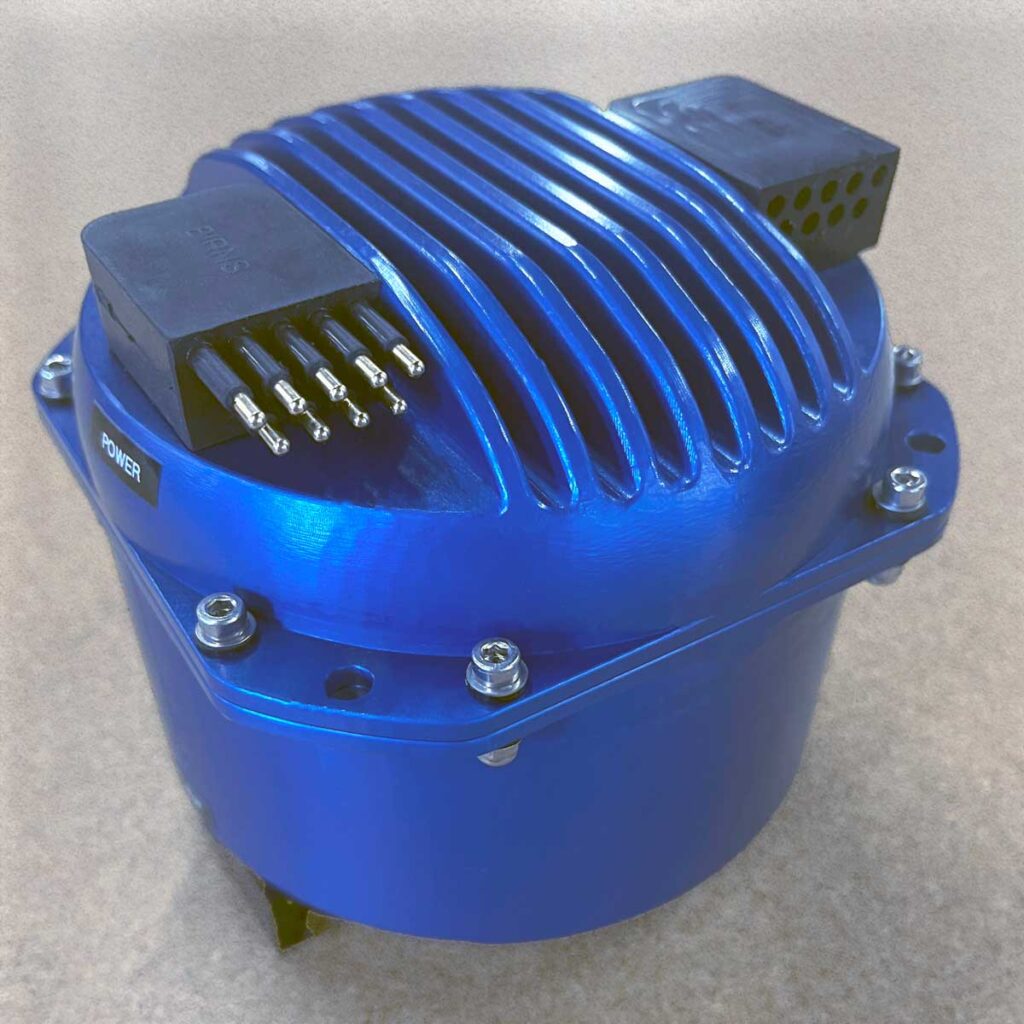
Sistema de navegación inercial MEMS de GuideNav.
Los acelerómetros detectan la aceleración lineal en múltiples ejes, lo que permite al INS estimar los cambios en la velocidad y el desplazamiento. Los sistemas de navegación inercial integran dos veces los datos de aceleración para calcular la posición; sin embargo, este proceso puede introducir errores con el tiempo. Se utilizan filtros avanzados y correcciones de sesgo para mitigar la deriva. Los acelerómetros MEMS se utilizan comúnmente en plataformas ligeras, mientras que los sistemas de alto rendimiento se benefician de variantes más sensibles y con menos ruido.
Magnetómetros
Los magnetómetros miden el campo magnético de la Tierra para proporcionar información sobre el rumbo. Estos sensores actúan como brújulas digitales, ofreciendo un punto de referencia global para ayudar a mitigar la deriva de guiñada en los cálculos inerciales. Sin embargo, son sensibles a las interferencias magnéticas, especialmente en entornos con ruido eléctrico o cerca de materiales ferrosos. A pesar de ello, los magnetómetros siguen siendo un componente clave en muchos sistemas de navegación de drones pequeños y medianos.
Receptores GNSS
Cuando están disponibles, los receptores GNSS mejoran significativamente el rendimiento del INS al corregir los errores acumulados en las estimaciones de posición y velocidad. Muchas configuraciones de INS utilizan una integración GNSS/INS estrechamente acoplados, con correcciones RTK o módulos GNSS de doble antena que permiten una navegación de alta precisión. Esto es especialmente valioso en aplicaciones que requieren una precisión de centímetros, como la topografía o la agricultura de precisión.
Altímetros barométricos
Para el posicionamiento vertical, los altímetros barométricos ofrecen una alternativa o un complemento a la altitud derivada del GNSS. Estos sensores deducen la elevación midiendo la presión atmosférica, que cambia con la altura. Aunque están sujetos a desviaciones y a la variabilidad meteorológica, los datos barométricos pueden estabilizarse mediante calibraciones periódicas o la fusión con estimaciones GNSS e inerciales.
Software computacional integrado
Los sistemas INS se basan en software integrado para procesar los datos de los sensores en tiempo real. Los filtros de Kalman, en particular los filtros de Kalman extendidos (EKF), son los algoritmos de fusión más comunes, ya que combinan datos inerciales con entradas externas para refinar las estimaciones de navegación. El software debe tener en cuenta la deriva de los sensores, los cambios ambientales y las limitaciones del procesamiento en tiempo real, especialmente en entornos muy dinámicos o en los que no se dispone de GNSS.
Tipos de INS para plataformas no tripuladas
INS de grado de navegación
El INS de grado de navegación (también conocido como INS convencional o autónomo) utiliza sensores de alta calidad, como giroscopios láser en anillo (RLG) o giroscopios de fibra óptica (FOG), y acelerómetros de precisión. Estos sistemas son capaces de proporcionar datos de posición y orientación de alta precisión durante largos periodos de tiempo sin necesidad de entradas externas; sin embargo, suelen ser grandes, caros y consumir mucha energía. Se utilizan en la industria aeroespacial, en submarinos y en otras plataformas de misión crítica en las que es esencial la fiabilidad a largo plazo.
SISTEMAS INS MEMS AUTÓNOMOS
Los sistemas INS MEMS utilizan giroscopios y acelerómetros de sistemas microelectromecánicos (MEMS). Estos sistemas son significativamente más pequeños, ligeros y eficientes desde el punto de vista energético, lo que los hace ideales para drones, electrónica de consumo y plataformas portátiles. Sin embargo, suelen sufrir mayores tasas de deriva y menor precisión con el tiempo en comparación con los sistemas de navegación.
INS tácticos/militares
Los INS de grado táctico cubren la brecha entre los sistemas MEMS y los de navegación. Utilizan sensores inerciales de mayor calidad con una estabilidad de sesgo mejorada y una deriva reducida. Estos sistemas se utilizan en UAV militares, vehículos terrestres y determinadas aplicaciones industriales que requieren una mayor precisión sin el coste ni el volumen de los INS de navegación completos.
Sistemas INS asistidos por GNSS (GNSS/INS)
Los GNSS/INS o INS integrados fusionan los datos inerciales con la entrada del GNSS (Sistema Global de Navegación por Satélite) para corregir la deriva y mejorar la precisión a lo largo del tiempo. Estos sistemas híbridos son comunes tanto en aplicaciones comerciales como militares, especialmente cuando se prevé una pérdida intermitente de la señal GNSS, como en cañones urbanos, bajo copas de árboles o en entornos conflictivos.
Otros vehículos no tripulados
UGV (vehículos terrestres no tripulados)
El INS es compatible con la odometría en condiciones en las que los codificadores de ruedas dejan de ser fiables, como durante el deslizamiento o las transiciones de terreno. Funciona en combinación con cámaras, sistemas de visión por ordenador, LiDAR y sistemas de gestión de vehículos para mejorar la navegación y la autonomía en general.
USV y embarcaciones de superficie autónomas
El INS proporciona el rumbo y la posición en entornos marítimos. Junto con los sistemas GNSS y de brújula, facilitan la navegación en aguas profundas, los estudios marítimos y la estabilización de embarcaciones.
UUV y AUV (vehículos submarinos)
A menudo operan sumergidos, donde el GNSS no está disponible. El INS es esencial, ya que utiliza sensores inerciales, DVL (registrador de velocidad Doppler), sondas de profundidad, sonares y altímetros de presión para la navegación submarina.
Rendimiento del INS
El rendimiento de un sistema de navegación inercial se evalúa normalmente por su precisión de actitud, deriva de posición y estabilidad a lo largo del tiempo. Los sistemas de gama alta, como los que se utilizan en los UAV tácticos o en las plataformas marítimas, pueden mantener la orientación dentro de 0,1 grados y limitar la deriva de posición a menos de un metro por hora. Por el contrario, los sistemas compactos basados en MEMS para drones pequeños suelen tener una precisión de entre 0,5 y 1 grado, aunque presentan mayores tasas de deriva. Otros factores importantes son la frecuencia de actualización del sistema, la estabilidad del sesgo y la capacidad de mantener una altitud precisa, especialmente cuando las señales GNSS son débiles o no están disponibles. Estas métricas son fundamentales a la hora de seleccionar un INS para aplicaciones que exigen una navegación precisa e ininterrumpida.
Retos de integración y mejores prácticas
La selección de sensores debe equilibrar el tamaño, el peso, la potencia y el coste en función de las limitaciones de la plataforma. Los UAV más pequeños suelen utilizar sensores MEMS, mientras que los sistemas más grandes o críticos para la misión pueden incorporar IMU de grado táctico. La calibración es esencial para corregir la deriva de temperatura, la desalineación mecánica y las influencias de la vibración. El software debe ser robusto y capaz de ejecutar filtros de alta frecuencia (por ejemplo, EKF) en tiempo real para combinar datos de sensores inerciales, GNSS y, opcionalmente, sistemas de visión o LiDAR.
Para operaciones sin GNSS, los sistemas deben ser capaces de cambiar de modo de forma autónoma y gestionar los errores, mientras que las misiones de larga duración requieren una navegación con una deriva excepcionalmente baja y un modelado preciso de las condiciones dinámicas. Las consideraciones normativas también pueden requerir la certificación del sistema, especialmente en aplicaciones de defensa, aeroespaciales o marítimas.
INS frente a GPS
Los sistemas GNSS/INS ofrecen un rendimiento óptimo al fusionar el posicionamiento por satélite con estimaciones inerciales, corrigiendo la deriva y aumentando la fiabilidad. El INS puro, aunque resistente a las interferencias y obstrucciones, sufre una acumulación de errores con el tiempo. Los enfoques híbridos, en particular las arquitecturas estrechamente acopladas, permiten el procesamiento simultáneo de datos GNSS sin procesar y datos IMU dentro de algoritmos de filtrado, lo que se traduce en un mejor rendimiento en entornos difíciles.
Consideraciones computacionales
El software de navegación inercial debe procesar las entradas de los sensores con una latencia mínima para garantizar una navegación precisa. Para mantener una navegación receptiva, se requiere un filtrado Kalman en tiempo real, que suele funcionar a una frecuencia de entre 50 y 200 Hz. Los sistemas avanzados integran sensores adicionales, como LiDAR, visión y radar, para mejorar la percepción espacial y la precisión, especialmente en entornos sin GNSS o con pocas características. La elección del procesador integrado y la arquitectura del sistema tiene una influencia significativa en el rendimiento del sistema, especialmente cuando es necesario mantener baja la sobrecarga computacional.
Aplicaciones
La navegación inercial es esencial en la cartografía de precisión y la topografía aérea, donde los sistemas INS asistidos por GNSS con RTK GNSS ofrecen una precisión de centímetros. En el reparto con drones y la inspección, un INS robusto mantiene la estabilidad y el control del vuelo incluso en zonas abarrotadas u obstruidas. En el ámbito marítimo, los USV y los AUV dependen del INS para obtener un rumbo, una profundidad y una estabilización fiables en condiciones marítimas dinámicas. Las aplicaciones tácticas y de defensa requieren sistemas de alta precisión y resistentes a las interferencias que puedan mantener la orientación y la posición con una mínima intervención externa.
Rendimiento de grado militar
Si bien la integración del GNSS mejora el rendimiento general, el INS por sí solo es esencial para las operaciones en entornos sin GNSS, como interiores, bajo el agua, cañones urbanos o en condiciones de interferencia. Los sistemas INS abarcan desde soluciones MEMS rentables en drones pequeños hasta unidades de navegación altamente estables que se utilizan en aplicaciones de defensa, marítimas y tácticas. Comprender las especificaciones de los sensores, los comportamientos de deriva, los algoritmos de filtrado y las estrategias de integración es clave para lograr un rendimiento de navegación de grado de misión.