Technologie de guidage autonome pour les véhicules sans pilote - UAV, USV, UGV, UUV
Trouvez des fabricants de systèmes de guidage de drones, permettant aux plateformes aériennes, terrestres et maritimes sans pilote d'effectuer une navigation autonome, une exécution adaptative de la mission et une planification résiliente de la trajectoire avec une intervention humaine minimale ou inexistante.
Accéléromètres et gyroscopes MEMS numériques de haute précision pour les systèmes sans pilote exigeants fonctionnant dans des environnements difficiles
Solutions matérielles pour drones : systèmes de propulsion et de carburant, servomoteurs et contrôleurs de vol, solutions d'imagerie, lanceurs et parachutes
Si vous concevez, construisez ou fournissez Systèmes de guidage, Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Technologie de guidage autonome pour les véhicules sans pilote - UAV, USV, UGV, UUV
Vue d'ensemble par
Eleanor Widdows
Mise à jour:
Les systèmes de guidage autonomes permettent aux véhicules sans pilote opérant dans les domaines aérien, terrestre et maritime d’entreprendre une navigation autodirigée, une adaptation de mission en temps réel et une planification de trajectoire résiliente sans intervention humaine. Intégrant des données provenant de multiples capteurs et sources de positionnement, les architectures de guidage UxV offrent un contrôle de précision et une connaissance de la situation, et certaines solutions fonctionnent même dans des environnements où les signaux GNSS sont limités ou interdits.
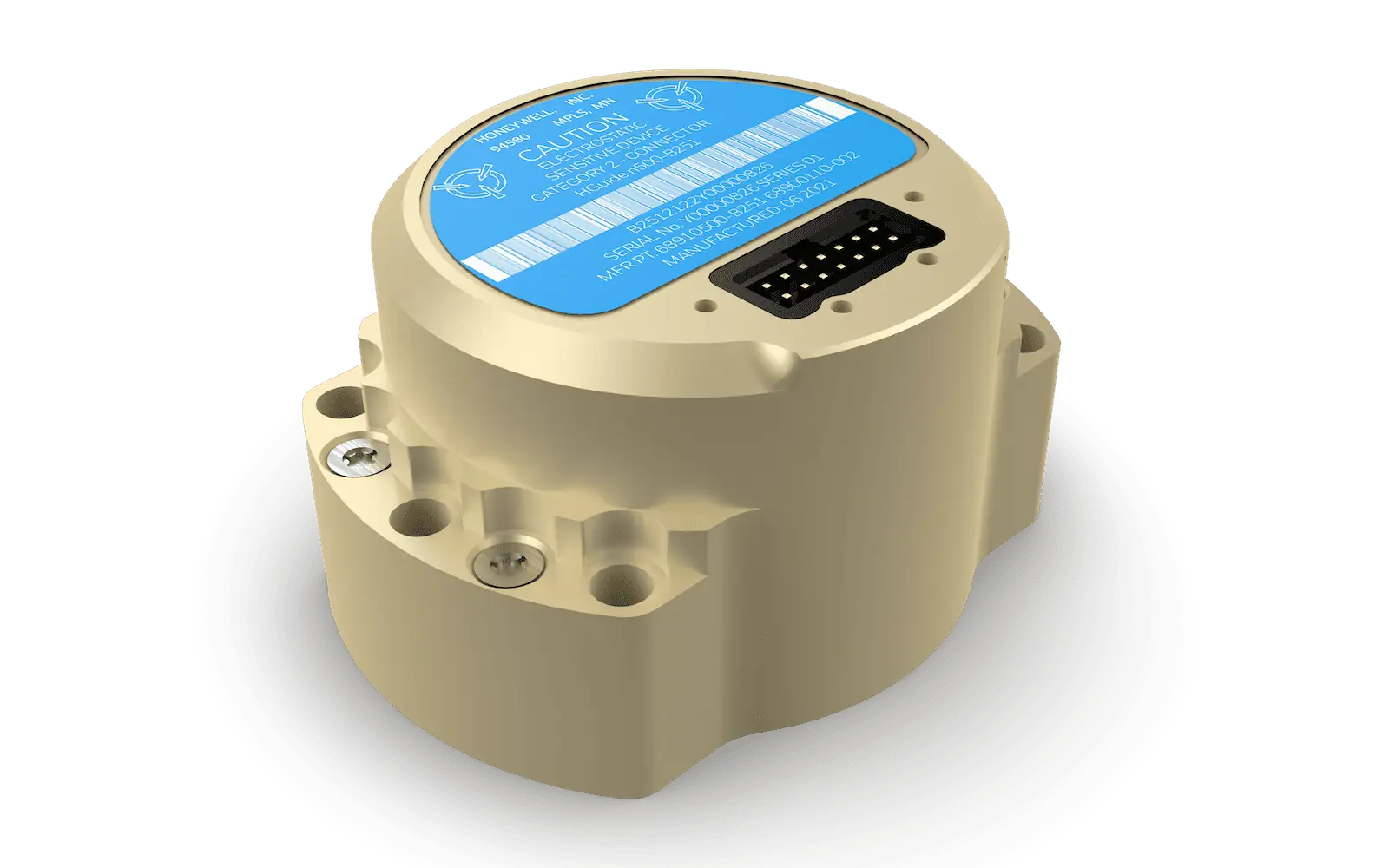
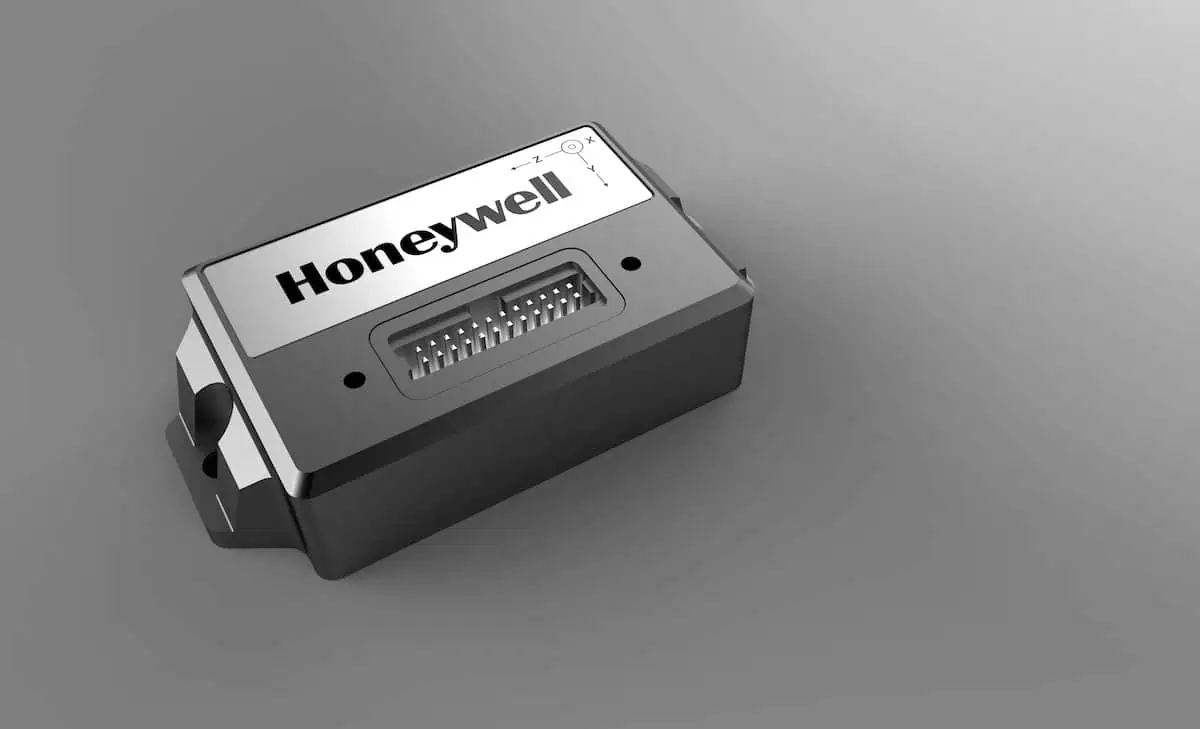
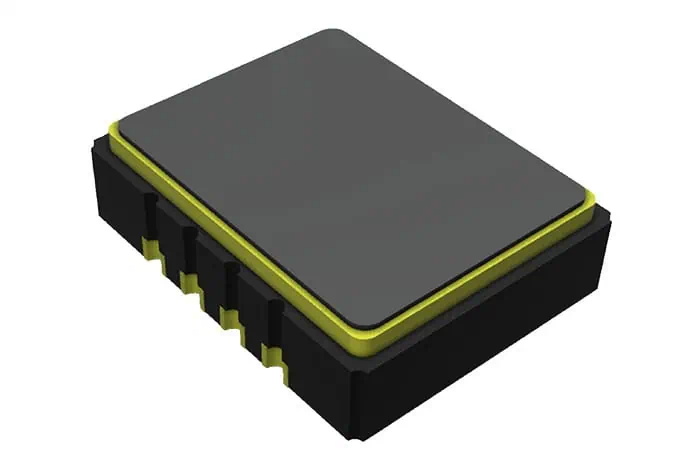
IMU MEMS HGuide i700 de Honeywell Aerospace
Le guidage autonome est essentiel pour un large éventail de plates-formes sans pilote, des drones tactiques aux UGV, AUV et UUV en passant par les UAV à longue endurance. Les technologies clés utilisées dans ces solutions comprennent les capteurs inertiels, les récepteurs GNSS/GPS, les algorithmes de navigation visuelle et les systèmes de navigation sous-marine spécialisés. Ces composants sont souvent combinés par fusion de capteurs pour permettre des performances intelligentes, adaptables et résistantes aux missions.
Capteurs inertiels et systèmes de navigation
Les capteurs inertiels sont fondamentaux pour de nombreux systèmes de guidage autonomes. Les unités de mesure inertielle (IMU), qui contiennent des accéléromètres et des gyroscopes, fournissent des mesures en temps réel de la vitesse, de l’accélération et de la vitesse angulaire. Ces flux de données permettent un suivi continu de la position et de l’attitude par le biais d’un processus connu sous le nom de navigation à l’estime, ce qui permet aux plates-formes sans pilote de maintenir la navigation en cas de panne du GNSS ou d’interférence des signaux.
Les systèmes de guidage avancés utilisent des UMI de qualité tactique ou de navigation, capables de maintenir de faibles taux de dérive sur de longues périodes. Pour les UAV et les UGV, la navigation inertielle garantit la fidélité du contrôle pendant les manœuvres dynamiques ou lors de la transition dans des zones compromises par le GPS, telles que les tunnels, les canyons ou les environnements urbains. Pour les véhicules sous-marins, où les signaux de navigation externes sont totalement absents, les systèmes inertiels constituent la principale méthode d’estimation de la position entre les repères acoustiques.
De nombreuses solutions de guidage combinent des capteurs inertiels avec des magnétomètres, des baromètres et des récepteurs GNSS, ce qui améliore la précision et la tolérance aux pannes. Les configurations IMU redondantes et les supports isolés des vibrations garantissent un fonctionnement robuste dans les conditions de chocs et de vibrations élevés que l’on trouve généralement dans les déploiements militaires et aérospatiaux.
Guidage basé sur le GPS/GNSS
La navigation par satellite joue un rôle essentiel dans le guidage autonome des systèmes aériens, terrestres et de surface sans pilote. Les récepteurs GNSS, capables d’accéder aux constellations GPS, GLONASS, Galileo et/ou BeiDou, fournissent la référence positionnelle requise pour le suivi des points de cheminement, le géofencing et les opérations multiplateformes coordonnées.
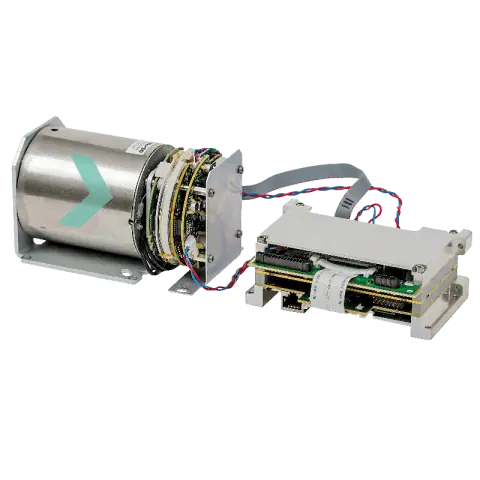
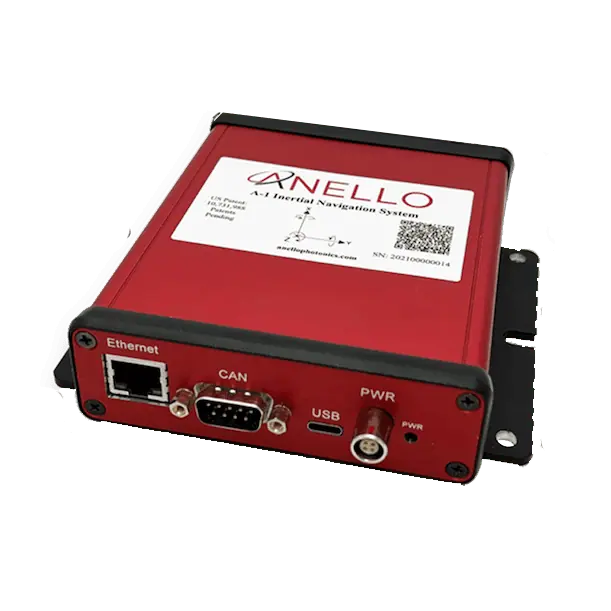
Pilote automatique VECTOR-400 de UAV Navigation-Grupo Oesía.
Les capacités GNSS avancées, telles que la cinématique en temps réel (RTK) et le positionnement ponctuel précis (PPP), offrent une précision centimétrique adaptée aux manœuvres de décollage, d’atterrissage et d’amarrage autonomes. Les unités GNSS à double fréquence et à double antenne améliorent la robustesse du positionnement et l’estimation du cap, ce qui permet aux véhicules de conserver une orientation précise même dans des environnements où le GPS est dégradé.
Cependant, le GNSS est vulnérable au brouillage des signaux, à l’usurpation d’identité et aux effets de trajets multiples, en particulier en cas de guerre urbaine, de guerre électronique ou d’opérations à l’intérieur des bâtiments. Pour maintenir la continuité de la mission, les systèmes de guidage autonomes utilisent souvent une intégration GNSS/INS étroitement couplée, permettant aux plates-formes de passer en douceur du positionnement absolu au positionnement relatif sans perte de contrôle.
Navigation basée sur la vision et SLAM
La navigation visuelle joue un rôle crucial dans les environnements où les signaux GNSS sont indisponibles, intermittents ou délibérément perturbés. À l’aide de caméras embarquées, de LiDAR et parfois de radars, les systèmes sans pilote peuvent interpréter leur environnement et localiser leur position grâce à la détection d’éléments, à l’analyse du flux optique et à l’odométrie visuelle.
Les algorithmes de localisation et de cartographie simultanées (SLAM) permettent aux véhicules autonomes de construire des cartes 3D détaillées de leur environnement en temps réel tout en estimant simultanément leur position à l’intérieur de celui-ci. Cette approche est essentielle pour la navigation intérieure, les missions souterraines ou la navigation dans une végétation dense où le GNSS ne peut pas pénétrer.
La navigation par vision permet également une détection avancée des obstacles, une classification du terrain et un réacheminement dynamique. Dans les drones autonomes, la navigation visuelle est souvent utilisée en conjonction avec des données inertielles pour permettre un vol stationnaire de précision, un vol en intérieur ou un vol dans des zones dépourvues de GPS. Pour les robots terrestres, la vision stéréo ou les caméras de détection de profondeur aident à interpréter les caractéristiques de la surface, les pentes et les dangers inattendus.
L’informatique de périphérie accélère les performances de ces systèmes en traitant les données visuelles à bord, ce qui réduit la dépendance à l’égard des liaisons de communication et permet une prise de décision en temps réel pour l’évitement des collisions et la planification de la trajectoire.
Guidage sous-marin pour AUV et UUV
Les environnements sous-marins représentent l’un des défis les plus complexes pour le guidage autonome. En l’absence de GPS/GNSS, les systèmes sous-marins doivent s’appuyer sur la navigation inertielle, les enregistreurs de vitesse Doppler (DVL), le positionnement acoustique ou le référencement du terrain par sonar pour déterminer leur position et naviguer efficacement.
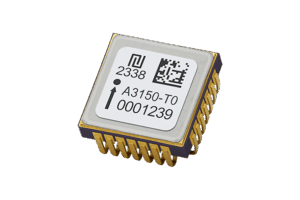
Certus Mini A MEMS AHRS Sensor by Advanced Navigation
Les systèmes inertiels, bien qu’essentiels, subissent une dérive cumulative au fil du temps. Pour corriger ce phénomène, les AUV et les UUV utilisent des DVL pour mesurer la vitesse par rapport au fond marin et des systèmes acoustiques tels que les réseaux USBL (Ultra-Short Baseline), SBL (Short Baseline) et LBL (Long Baseline) pour recevoir des corrections de position externes. Ces références acoustiques sont souvent intégrées à la navigation intégrée embarquée via des filtres de Kalman pour créer une solution de navigation hybride avec une précision et une fiabilité à long terme.
La navigation relative au terrain (TRN) est également employée par les véhicules sous-marins, en utilisant un sonar prospectif ou des échosondeurs multifaisceaux pour faire correspondre le profil du fond marin à des cartes bathymétriques connues. Cela permet une localisation précise dans des zones où les transpondeurs acoustiques ne sont pas disponibles ou pratiques.
Ces technologies de guidage sous-marin sont essentielles pour des opérations telles que l’inspection des pipelines, la cartographie des fonds marins, l’exploration sous la glace et l’amarrage autonome. Elles peuvent être conçues avec des architectures tolérantes à la pression, à faible consommation d’énergie et entièrement fermées, adaptées à des missions de longue durée dans des eaux profondes ou turbulentes.
Autonomie intégrée et fusion de capteurs
Les plateformes de guidage autonomes peuvent s’appuyer sur des cadres de fusion de capteurs en temps réel qui intègrent des données provenant de capteurs inertiels, de GNSS, de sources visuelles et d’autres données environnementales. Ces moteurs de fusion calculent une solution de navigation robuste et continuellement mise à jour, garantissant que les véhicules sans pilote conservent le contrôle et la connaissance de la situation dans des environnements complexes.
Les systèmes de guidage modernes peuvent utiliser la prédiction pilotée par l’IA pour leur permettre de s’adapter aux paramètres de la mission, de détecter les défauts et les dangers, et de réagir à des conditions inattendues avec un temps de latence minimal. Cette autonomie est essentielle pour un large éventail de cas d’utilisation, notamment la coordination d’essaims de drones, la surveillance maritime à longue distance, les opérations militaires à haut risque et les tâches d’inspection industrielle dans des zones reculées.
Silicon Sensing étend son partenariat de distribution de longue date avec Althen afin de renforcer la couverture nord-américaine et d'améliorer l'accès mondial à ses capteurs inertiels de haute performance et à son expertise en matière d'intégration
Le programme VANTAGE, soutenu par le Fonds européen de défense, vise à fournir une plate-forme européenne modulaire et interopérable de drones tactiques pour les missions modernes de défense et de sécurité