YellowScan explains how Instadrone used the YellowScan Explorer LiDAR system to collect LiDAR data to model four avalanche corridors in the Pyrenees.
Challenge
This mission was started in response to a request from the Departmental Directorate of Territories, which lacked LiDAR equipment and therefore outsourced the entire data capture process to drone companies.
The objective was to conduct a comprehensive modeling of four avalanche corridors in the Pyrenees, covering a total area of 430 hectares (1 060 ac.) through a LiDAR survey.
These areas undergo regular updates to ensure accuracy and relevancy. Their primary requirement was to use a LiDAR system integrated with an M300 RTK, enabling efficient and rapid surveying of the mountainous terrain with its challenging features, such as steep slopes, rugged landscapes, and densely forested areas. The survey spanned 2.3 kilometers (1.4 miles) and featured a maximum elevation difference of 1,000 meters (about 3,300 ft.), presenting the most challenging section of the project.
Solution
To fulfill these requirements, Instadrone were tasked to collect LiDAR data using their YellowScan Explorer LiDAR system.
The primary objectives included achieving a minimum ground point density of 8 points per square meter (excluding water and buildings) in heavily forested areas, all within a tight timeframe. Additionally, the precision (1) of the pointcloud was essential, the target being 5 cm.
Moreover, the survey aimed to achieve an accuracy (2) of the point cloud within 10 cm.
An initial mission was undertaken using a DJI L1 sensor; however, it did not achieve the desired results due to various challenges encountered during data capture and post-processing.
-

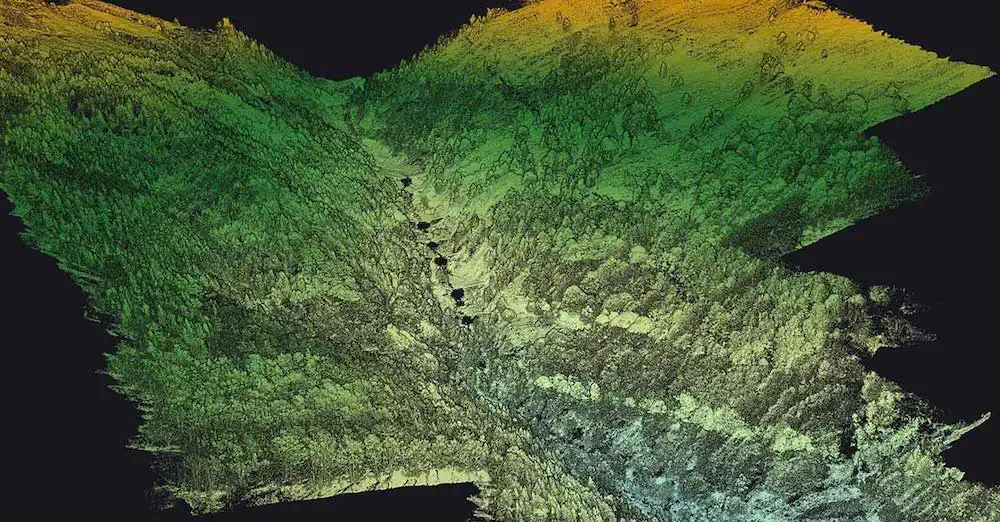
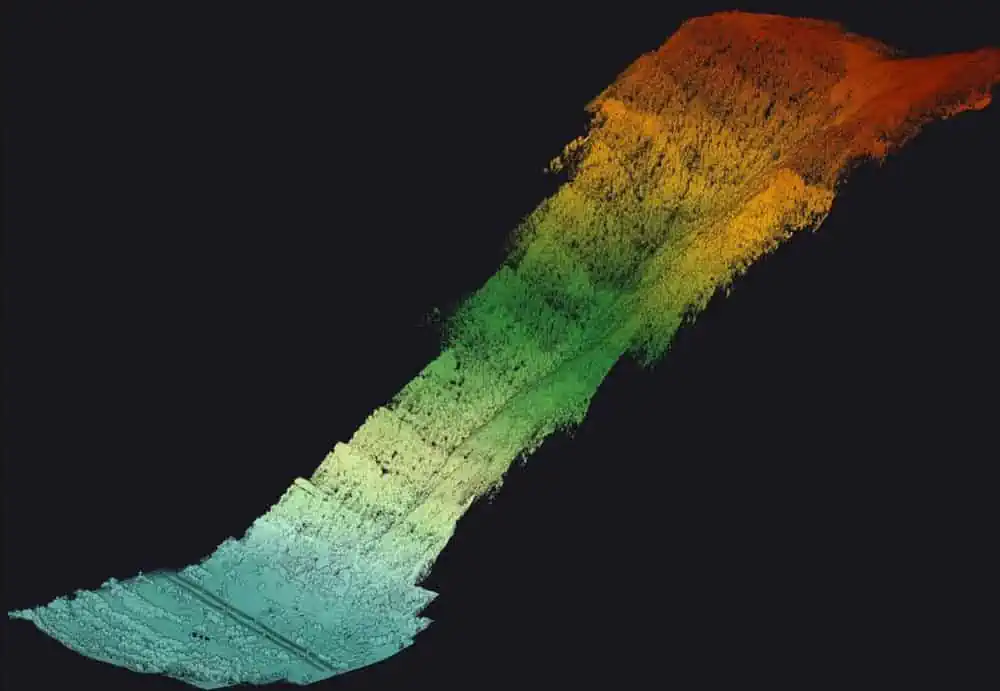
- Avalanche corridor surveyed in the French Pyrenees

-
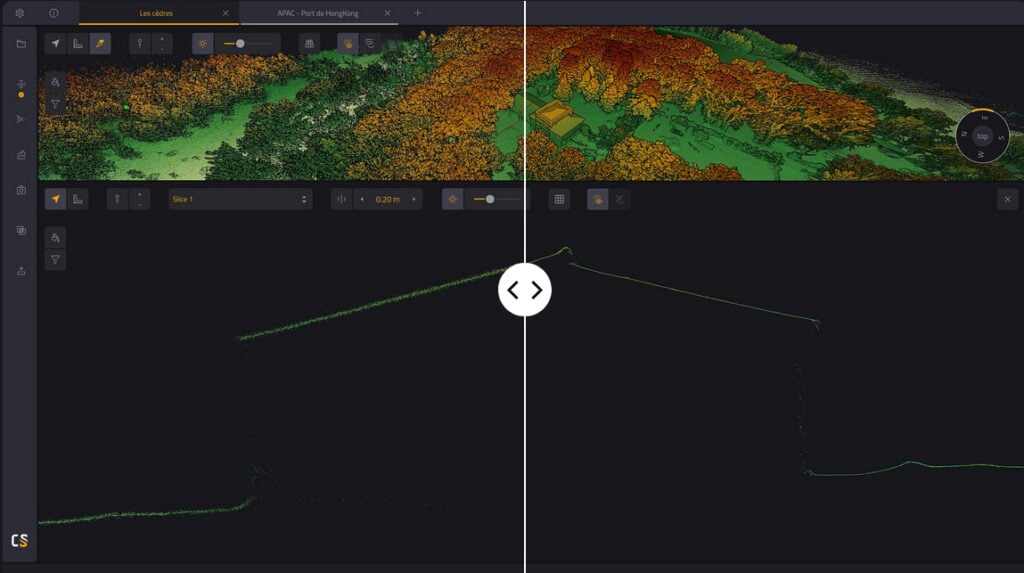
- Point cloud of the study area with deciduous and coniferous vegetation

Mission parameters
- Survey size:
- 4 zones totaling 430 ha. (1 060 ac.)
- Duration:
- Half a day for flight preparation – decision-making on speed, altitude, double grid or not, takeoff point, GCP placement, backup pivot location for the IGN reference point, etc.
- Approximately 6 hours of flight time
- Processing: 1 day for POSPac + YellowScan CloudStation, followed by a full week of dedicated time for ground/surface classification in third-party software.
- Number of flights:
- 7 flights: 3 flights for the largest zone (176 ha./435 ac.), 2 flights for 148 ha. (366 ac.), and the remaining 2 flights for two smaller zones.
- Speed and altitude:
- Speed of 5 m/s at a height of 120 m AGL.
- Equipment:
- YellowScan Explorer LiDAR system.
- M300 RTK drone.
- Trimble R4S GNSS receiver + CORS network for control.
- POSPac software.
- YellowScan CloudStation with Strip Adjustment module.
- No camera – uncolored point cloud.

Vertical slice of the point cloud with highly accurate DTM data
Results
Point density: minimum 100 pts per square meter (depending on if under trees or not)
Accuracy: between 5 and 10 cm XYZ
Instadrone reported that the point density achieved using the YellowScan Explorer LiDAR system was notably superior to the DJI L1 solution, whether on vegetated or non-vegetated surfaces. Additionally, Instadrone got a higher quality point cloud, and it successfully met the precision and accuracy requirements.
Furthermore, the implementation of the Strip Adjustment feature in YellowScan CloudStation enhanced the overall coherence between each flight line, leading to a more precise modeling outcome.
The YellowScan explorer easily handled the full survey with over 400m (1300 ft.) of elevation gain
Their client was extremely satisfied with the result.
Since this project, Instadrone has almost only used YellowScan LiDAR solutions. Firstly, because it offers a heightened level of confidence in obtaining reliable data, unlike the L1 system that often produced corrupted or incomplete files without clear explanations. Instadrone added that the integration of POSPac within the YellowScan CloudStation enables seamless post-processing management, allowing for flexibility in utilizing a pivot or IGN/CORS reference point. They also mentioned that YellowScan LiDAR solutions consistently provide high-quality and dense point clouds, surpassing the capabilities of the L1 system, regardless of vegetation presence. This enhanced performance not only ensures accurate results but also simplifies subsequent classification tasks.
Using YellowScan LiDAR systems for this project showed many benefits:
- A higher quality point cloud.
- Sufficient point density even in densely vegetated areas.
- Increased comfort for pilots through faster data acquisition, enabling flights at altitudes of 120 meters (390 ft.) and speeds of 10 m/s.
- YellowScan’s post-processing allowed for complete control over point cloud generation using POSPac.
- The combination of LiDAR and drones reduced human risks, particularly in challenging terrains characterized by rugged topography and steep slopes.
“The support provided by YellowScan was readily available in the event of major issues. The Support Team is always attentive, gives clear explanations, and they are always available whenever we encounter any issues, whether it’s through phone calls, TeamViewer, or email,” said Arthur Marcel, Surveying Technician – Instadrone.
(1) Precision: In LiDAR surveys, precision refers to the standard deviation of the average distance between points and the average plane formed. Combined with the mismatch evaluation (plane-to-plane distances between strips), this can give a good estimation of the overall point cloud noise, often mistakenly considered as precision.
(2) Accuracy in this context measures the distance between a point in the acquired cloud and its corresponding point in the reference cloud, providing an assessment of the overall coherence of the survey with respect to a given reference. Another way of measuring accuracy would be to use GCPs.