Navigation et positionnement sans GNSS pour les systèmes sans pilote
Trouvez des fournisseurs, des fabricants et des développeurs de technologies de navigation sans GNSS. Les systèmes de navigation et de positionnement sans GNSS permettent aux plateformes sans pilote de fonctionner de manière fiable lorsque les signaux de navigation par satellite sont indisponibles, dégradés ou intentionnellement perturbés. Ces technologies sont essentielles pour garantir le positionnement, la navigation et la synchronisation dans des environnements contestés, encombrés et privés de signaux dans les domaines aérien, terrestre, maritime et sous-marin.
Si vous concevez, construisez ou fournissez Navigation et positionnement sans GPS/GNSS, Créez un profil pour mettre en avant vos compétences et entrer en contact avec des visiteurs qui recherchent activement vos solutions.
Navigation et positionnement sans GNSS pour les systèmes sans pilote
Vue d'ensemble par
Eleanor Widdows
Mise à jour:
La technologie de navigation et de positionnement sans GNSS permet aux systèmes sans pilote de déterminer leur position, leur vitesse et leur orientation sans dépendre du GPS ou d’autres signaux de navigation par satellite. Ces technologies sont essentielles, car les plateformes aériennes, terrestres, maritimes et sous-marines sans pilote sont de plus en plus souvent amenées à fonctionner dans des environnements où le GNSS n’est pas disponible, est dégradé ou est délibérément perturbé par le brouillage ou le spoofing.
Grâce à l’utilisation de capteurs embarqués, de méthodes de traitement et de navigation alternatives, la navigation sans GNSS offre un positionnement résilient dans les canyons urbains, les espaces intérieurs et souterrains, les environnements maritimes et les conditions électromagnétiques difficiles. Cette approche favorise l’autonomie sécurisée, la continuité des missions et la fiabilité opérationnelle lorsque la navigation par satellite n’est pas disponible ou n’est pas fiable.
Suite de navigation sans GPS à trois niveaux pour drones par Honeywell Aerospace.
Dans quels cas la navigation sans GNSS est-elle nécessaire ?
Défense et opérations contestées
La navigation sans GNSS permet un positionnement fiable pour les systèmes sans pilote opérant dans des conditions de brouillage GPS, d’usurpation d’identité et d’attaque électronique. Les drones militaires et autres plateformes s’appuient sur ces capacités pour maintenir la continuité de la navigation dans les espaces aériens contestés et les environnements électromagnétiques hostiles.
Autonomie en milieu urbain et bâti
Les véhicules autonomes opérant dans les canyons urbains sont confrontés à des blocages de signaux et à des interférences multivoies provenant des bâtiments. La navigation sans GNSS permet un fonctionnement sûr des plateformes aériennes et terrestres lorsque la navigation par satellite continue n’est pas disponible.
Opérations de recherche et de sauvetage
La navigation sans GNSS permet aux systèmes sans pilote de fonctionner à l’intérieur, sous terre ou dans des zones sinistrées où les infrastructures sont endommagées ou indisponibles. Ces capacités permettent une navigation efficace dans les structures effondrées, les tunnels et les terrains urbains denses.
Opérations maritimes et sous-marines
Les environnements sous-marins et côtiers sont intrinsèquement dépourvus de GNSS. Les véhicules sous-marins autonomes et les plates-formes de surface s’appuient sur des méthodes de navigation sans GNSS pour maintenir un positionnement précis pendant les missions de longue durée.
Autonomie commerciale et industrielle
Les applications industrielles telles que la robotique d’entrepôt, les opérations minières, les activités offshore et l’inspection des infrastructures bénéficient de la navigation sans GNSS. Ces environnements exigent un positionnement fiable, indépendant des signaux externes, afin d’améliorer la sécurité et l’efficacité opérationnelle.
Types de systèmes de navigation sans GNSS
Systèmes de navigation inertielle
Les systèmes de navigation inertielle fournissent un positionnement autonome en calculant le mouvement à partir de capteurs inertiels embarqués. Ces systèmes fonctionnent indépendamment des signaux externes, ce qui en fait une capacité essentielle pour la navigation sans GNSS sur les plateformes aériennes, terrestres, maritimes et sous-marines sans pilote.
Unités de mesure inertielle
Les unités de mesure inertielle combinent des accéléromètres et des gyroscopes pour mesurer l’accélération linéaire et le mouvement de rotation. Les IMU sont des composants fondamentaux de la navigation sans GNSS, fournissant des données à haut débit pour le calcul de position, l’estimation de l’attitude et le suivi des mouvements.
Systèmes de navigation intégrés GNSS/INS
Les systèmes GNSS/INS intègrent étroitement la navigation inertielle à la navigation par satellite lorsqu’elle est disponible, permettant ainsi des transitions fluides entre les opérations assistées par GNSS et celles sans GNSS. Dans des environnements contestés ou dégradés, le sous-système inertiel maintient une navigation continue tout en filtrant et en rejetant les entrées GNSS corrompues, faisant du GNSS/INS une architecture principale pour une navigation résiliente et sécurisée.
Système de navigation inertielle sans GNSS Marins M5 INS FOG d’Exail.
Horloges atomiques à l’échelle d’une puce
Les horloges atomiques à l’échelle d’une puce fournissent des références de synchronisation embarquées hautement stables qui réduisent la dérive de la navigation inertielle lors de pannes prolongées du GNSS. Lorsqu’elles sont intégrées à des systèmes GNSS/INS et inertiels, ces horloges améliorent la précision à long terme et la résilience de la synchronisation sans synchronisation externe.
Systèmes de navigation basés sur la vision
Les systèmes de navigation basés sur la vision utilisent des caméras optiques et un traitement embarqué pour estimer le mouvement en suivant les caractéristiques visuelles de l’environnement. Ces systèmes sont bien adaptés aux opérations sans GNSS dans les environnements urbains, intérieurs et à basse altitude présentant une structure visuelle suffisante.
Systèmes de localisation et de cartographie simultanées
Les systèmes de localisation et de cartographie simultanées permettent aux plateformes sans pilote de créer des cartes d’environnements inconnus tout en estimant leur position au sein de ceux-ci. Les systèmes SLAM prennent en charge la navigation autonome dans des conditions où le GNSS est indisponible et où aucune carte préalable ou référence absolue n’est disponible.
Systèmes de navigation Lidar
Les systèmes de navigation Lidar utilisent la détection laser active pour générer des données environnementales tridimensionnelles à des fins de localisation et de cartographie. Ces systèmes permettent une navigation de haute précision dans des environnements où le GNSS est indisponible, y compris dans des conditions de faible luminosité ou de visibilité réduite.
Systèmes de navigation radar
Les systèmes de navigation radar offrent une détection et une localisation robustes dans les environnements affectés par les conditions météorologiques, la poussière, la fumée ou une mauvaise visibilité. La navigation par radar est couramment utilisée sur les plateformes maritimes et aériennes qui nécessitent une capacité longue portée, tout temps et sans GNSS.
Systèmes de navigation magnétique
Les systèmes de navigation magnétique exploitent les variations spatiales du champ magnétique terrestre pour permettre le positionnement sans GNSS. Associés à des cartes magnétiques, ces systèmes offrent une navigation passive dans des environnements où les autres modes de détection sont limités.
Systèmes de navigation par référence au terrain
Les systèmes de navigation par référence au terrain estiment la position en corrélant les données des capteurs embarqués avec des cartes numériques du terrain ou d’altitude stockées. Ces systèmes sont efficaces pour les plateformes aériennes et terrestres à basse altitude opérant dans des régions sans GNSS avec un terrain bien caractérisé.
Systèmes de navigation astronomique
Les systèmes de navigation astronomique déterminent la position en observant les étoiles ou d’autres références célestes. Ces systèmes prennent en charge les missions de longue durée sans GNSS où les repères de navigation terrestres et les signaux satellites ne sont pas disponibles.
Systèmes de navigation multicapteurs
Les systèmes de navigation multicapteurs intègrent des données inertielles, GNSS/INS, visuelles, lidar, radar, magnétiques et topographiques. En combinant des modalités de détection complémentaires, ces systèmes améliorent la robustesse et la continuité dans divers environnements dépourvus de GNSS.
Logiciel de fusion de capteurs
Le logiciel de fusion de capteurs combine les données de plusieurs capteurs de navigation en une solution de navigation unifiée. Ces algorithmes sont essentiels pour gérer l’incertitude, corriger la dérive et maintenir un positionnement fiable en cas de panne ou d’attaque du GNSS.
Systèmes de navigation sécurisés et résilients
Les systèmes de navigation sécurisés sont conçus pour fonctionner malgré le brouillage, l’usurpation et la dégradation des signaux GNSS. Ces systèmes mettent l’accent sur la surveillance de l’intégrité, la détection des défauts et la résilience des performances afin de prendre en charge les opérations sans pilote critiques dans des environnements contestés.
Comparaisons et compromis
Le choix d’une approche de navigation sans GNSS implique des compromis entre précision, endurance, coût, taille, poids et puissance. Les systèmes de navigation inertielle sont compacts et autonomes, mais sensibles aux erreurs cumulatives. La navigation basée sur la vision offre une précision relative élevée, mais dépend de la visibilité environnementale et des ressources de traitement.
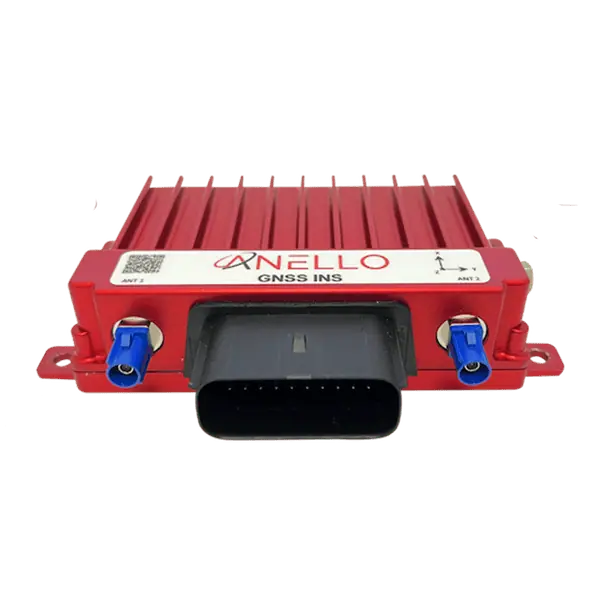
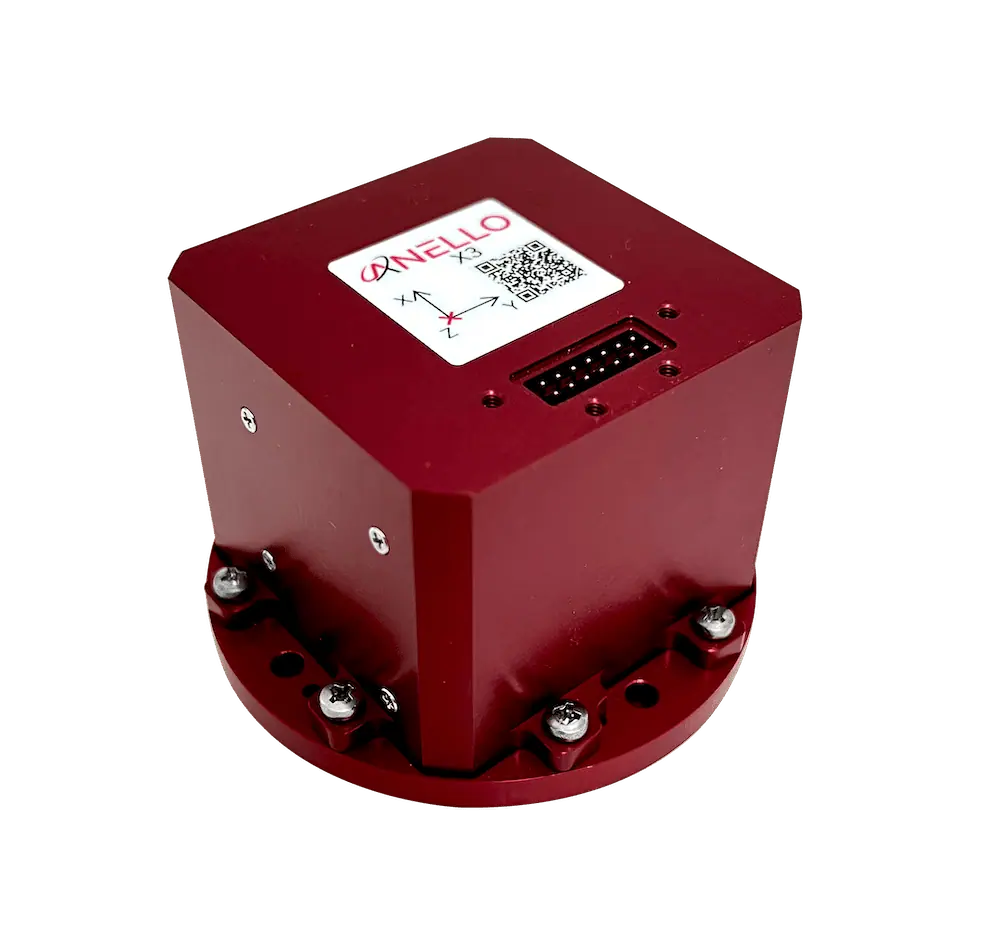
GNSS INS sans GPS par ANELLO Photonics.
Les capteurs lidar et radar offrent une indépendance environnementale, mais augmentent la complexité du système et les besoins en énergie. La navigation magnétique et la navigation par référence au terrain dépendent de la disponibilité et de la qualité des cartes environnementales. Les systèmes multicapteurs offrent la plus grande résilience, mais nécessitent des algorithmes d’intégration et de navigation avancés.
Le type de plateforme influence également le choix du système. Les systèmes de navigation des drones privilégient les capteurs légers et les taux de mise à jour rapides, tandis que les plateformes terrestres et maritimes peuvent accueillir des capteurs plus volumineux. Les systèmes de navigation sous-marins mettent l’accent sur la stabilité à long terme et la faible dérive en l’absence de mises à jour externes.
Normes et considérations pertinentes
Les technologies de navigation sans GNSS pour les systèmes sans pilote sont souvent conformes aux normes de défense et d’aérospatiale régissant les performances, la résilience et la sécurité de la navigation. Les normes pertinentes comprennent des spécifications militaires qui traitent du positionnement garanti, de la compatibilité électromagnétique et de la résilience contre le brouillage et l’usurpation. L’interopérabilité et la modularité sont des considérations essentielles pour l’intégration dans les architectures de systèmes sans pilote existantes.
Les solutions de navigation garanties mettent de plus en plus l’accent sur la cybersécurité, l’intégrité des signaux et la robustesse contre les attaques par usurpation. Les algorithmes de navigation doivent détecter les anomalies, rejeter les entrées corrompues et maintenir un fonctionnement sûr dans des conditions dégradées. À mesure que les niveaux d’autonomie augmentent, la navigation sans GNSS devient une capacité fondamentale qui permet une prise de décision et une exécution des missions fiables.
Les technologies de navigation et de positionnement sans GNSS continuent d’évoluer à mesure que les systèmes sans pilote s’étendent à des environnements plus complexes et plus contestés. Les progrès réalisés dans les algorithmes de fusion de capteurs, l’informatique embarquée et les modalités de navigation alternatives permettent une navigation résiliente sans dépendre des signaux satellites dans les domaines aérien, terrestre, maritime et sous-marin.