
Demuestra tus capacidades.
Si diseñas, construyes o suministras Sistemas de guiado, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.




Encuentre fabricantes de sistemas de guiado para drones, que permiten a las plataformas aéreas, terrestres y marítimas no tripuladas realizar una navegación autónoma, una ejecución adaptable de la misión y una planificación resistente de la trayectoria con una intervención humana mínima o nula.

Solución revolucionaria de autonomía impulsada por IA para vehículos terrestres

Soluciones de navegación y posicionamiento de alta precisión para vehículos no tripulados y autónomos


Plataformas de vehículos aéreos no tripulados para aplicaciones civiles y de defensa

Soluciones informáticas robustas para mando, control y comunicaciones de misión crítica

Tecnologías de sensores avanzadas y de vanguardia para drones y vehículos autónomos

Sistemas de detección inercial de grado industrial y automovilístico para UAV, robótica y vehículos autónomos
Tecnologías avanzadas de detección inercial basadas en FOG para sistemas no tripulados

Soluciones de posicionamiento y orientación de precisión para aplicaciones no tripuladas

Soluciones de guía, navegación y control (GNC) para drones y UAV

Acelerómetros MEMS de alta precisión para UAV y sistemas no tripulados utilizados en aplicaciones comerciales, industriales y militares

Soluciones BVLOS para UAS y UAM: pilas de combustible, radar, sensores de navegación, control de vuelo y SATCOM
Robótica y tecnologías submarinas para aplicaciones de defensa, comerciales y científicas

Girosos de fibra óptica de grado táctico e IMU FOG para UAV y vehículos autónomos
Sistemas de navegación inercial (INS) de alto rendimiento para sistemas no tripulados

Tecnología de navegación y posicionamiento inercial para sistemas autónomos no tripulados

Sensores de navegación inercial: MEMS IMU, acelerómetros, giroscopios, AHRS, GPS-INS y generación de nubes de puntos

Sistemas de navegación inercial, INS/GPS, AHRS y sensores IMU para sistemas no tripulados


Posicionamiento preciso para vehículos no tripulados: receptores GPS y GNSS, antenas y sistemas inerciales

Soluciones de detección inercial de bajo SWaP para sistemas autónomos y no tripulados

Controladores de vuelo autopiloto para UAV, estaciones terrestres, controladores ESC y antenas de seguimiento
Acelerómetros y giroscopios MEMS digitales de alta precisión para sistemas no tripulados exigentes que operan en entornos difíciles

Giroscopios de fibra óptica en miniatura (sensores FOG) e IMU para UAV y robótica

Sensores inerciales FOG y MEMS de cuarzo de alto rendimiento: giroscopios, IRU, IMU, INS

Sensores inerciales MEMS: IMU, INS asistido por GPS, giroscopios, acelerómetros, AHRS

Sensores de seguimiento, navegación, posicionamiento y comunicación para AUV, ROV y USV

Componentes y sensores profesionales para UAV: controladores de vuelo para drones, módulos GNSS, soluciones de telemetría.

Autopilotos y plataformas UAS de última generación para drones | Soluciones de hardware y software para drones y sistemas no tripulados

Controladores de vuelo, sensores y otras tecnologías electrónicas de vanguardia para drones y robótica
Proveedor de componentes electrónicos, baterías y sensores para UAV/drones OEM

Sistemas de posicionamiento y navegación GNSS, cartografía móvil UAV LiDAR y vehículos de superficie no tripulados

Soluciones de sensores inerciales MEMS, IMU, giroscopios y acelerómetros MEMS para vehículos no tripulados

Soluciones de hardware para UAV: sistemas de propulsión y combustible, servos y controladores de vuelo, soluciones de imagen, lanzadores y paracaídas

Si diseñas, construyes o suministras Sistemas de guiado, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.

Los sistemas de guiado autónomos permiten a los vehículos no tripulados que operan en dominios aéreos, terrestres y marítimos llevar a cabo una navegación autodirigida, una adaptación de la misión en tiempo real y una planificación de la trayectoria resistente sin intervención humana. Al integrar datos de múltiples sensores y fuentes de posicionamiento, las arquitecturas de guiado de los UxV ofrecen un control de precisión y un conocimiento de la situación, y algunas soluciones funcionan incluso en entornos con señales GNSS limitadas o denegadas.

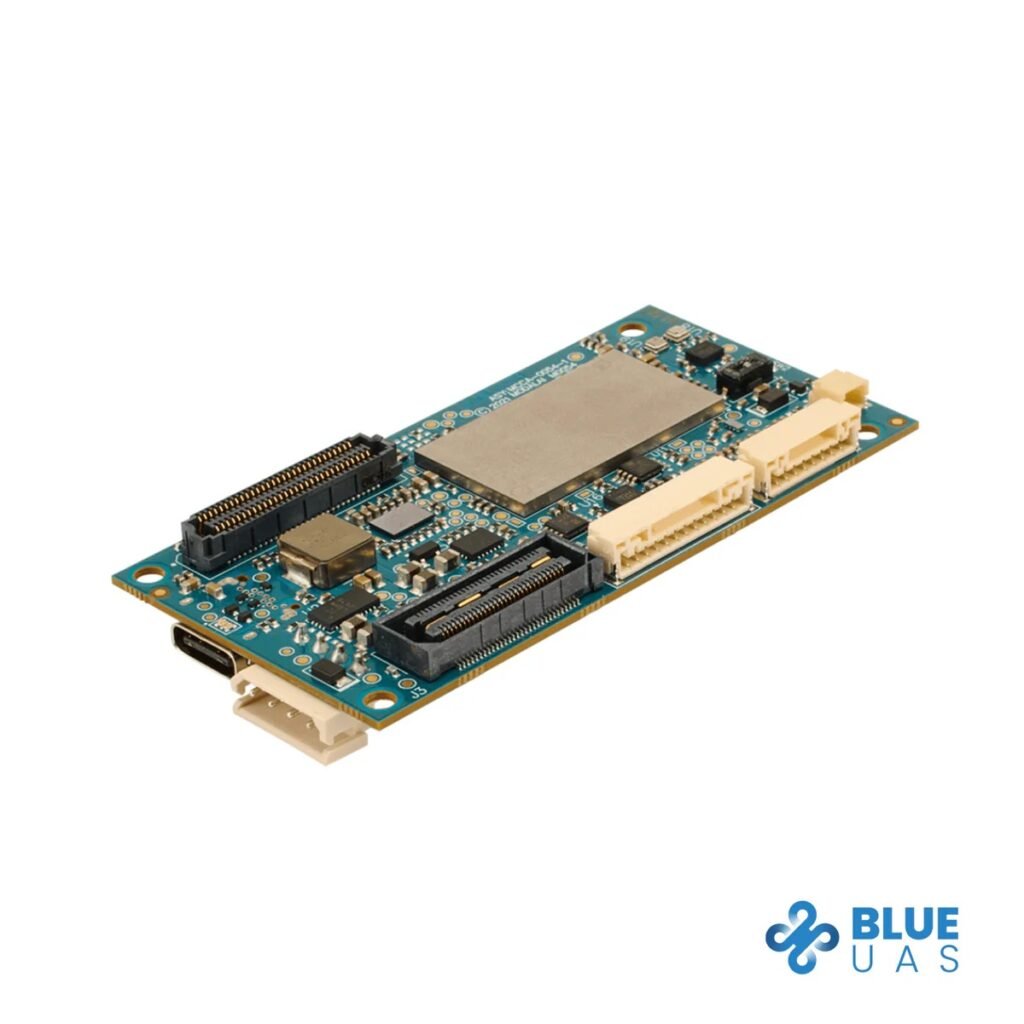
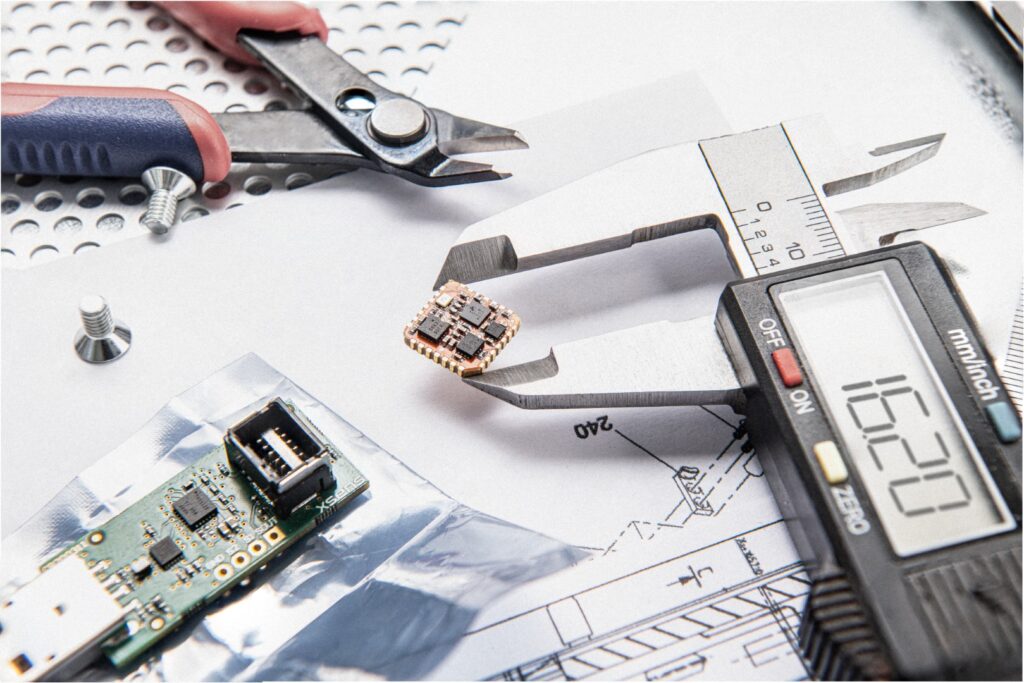
IMU MEMS HGuide i700 de Honeywell Aerospace
El guiado autónomo es esencial para una amplia gama de plataformas no tripuladas, desde drones tácticos y vehículos aéreos no tripulados de larga resistencia hasta vehículos aéreos no tripulados (UGV), vehículos aéreos no tripulados (AUV) y vehículos aéreos no tripulados (UUV). Las tecnologías clave utilizadas en estas soluciones incluyen sensores inerciales, receptores GNSS/GPS, algoritmos de navegación visual y sistemas especializados de navegación submarina. Estos componentes se combinan a menudo mediante la fusión de sensores para permitir un rendimiento inteligente, adaptable y resistente a las misiones.
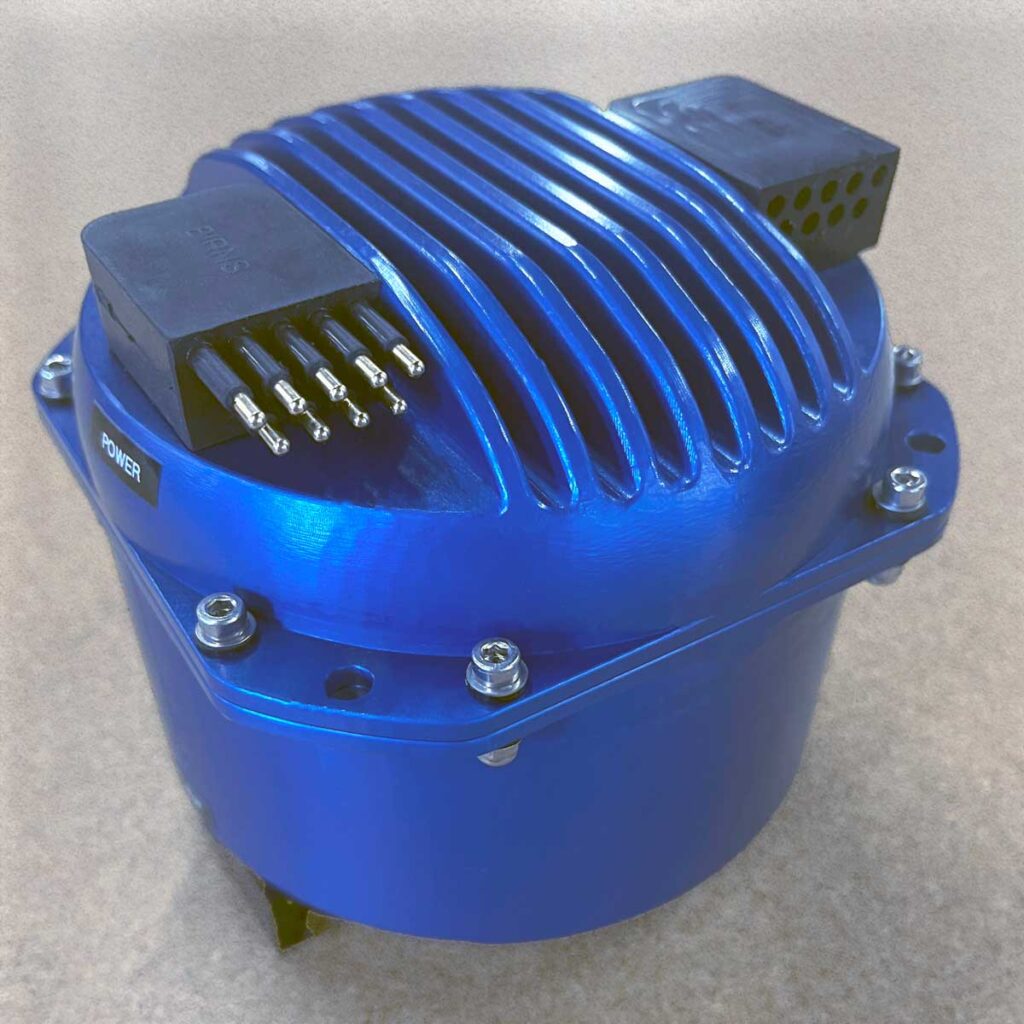
Los sensores inerciales son fundamentales para muchos sistemas de guiado autónomo. Las unidades de medición inercial (IMU), que contienen acelerómetros y giroscopios, proporcionan mediciones en tiempo real de la velocidad, la aceleración y la tasa angular. Estos flujos de datos permiten un seguimiento continuo de la posición y la actitud mediante un proceso conocido como cálculo muerto, lo que permite a las plataformas no tripuladas mantener la navegación durante los cortes del GNSS o las interferencias de la señal.
Los sistemas de guiado avanzados utilizan IMU de grado táctico o de navegación, capaces de mantener bajas tasas de deriva durante periodos prolongados. Para los vehículos aéreos no tripulados y los vehículos aéreos no tripulados, la navegación inercial garantiza la fidelidad del control durante las maniobras dinámicas o cuando se atraviesan zonas comprometidas por el GPS, como túneles, cañones o entornos urbanos. Para los vehículos submarinos, en los que las señales de navegación externas están totalmente ausentes, los sistemas inerciales sirven como método principal para estimar la posición entre fijaciones acústicas.
Muchas soluciones de guiado combinan sensores inerciales con magnetómetros, barómetros y receptores GNSS, lo que aumenta la precisión y mejora la tolerancia a los fallos. Las configuraciones redundantes de las IMU y los montajes aislados de las vibraciones garantizan además un funcionamiento robusto en las condiciones de fuertes sacudidas y vibraciones que suelen darse en los despliegues militares y aeroespaciales.
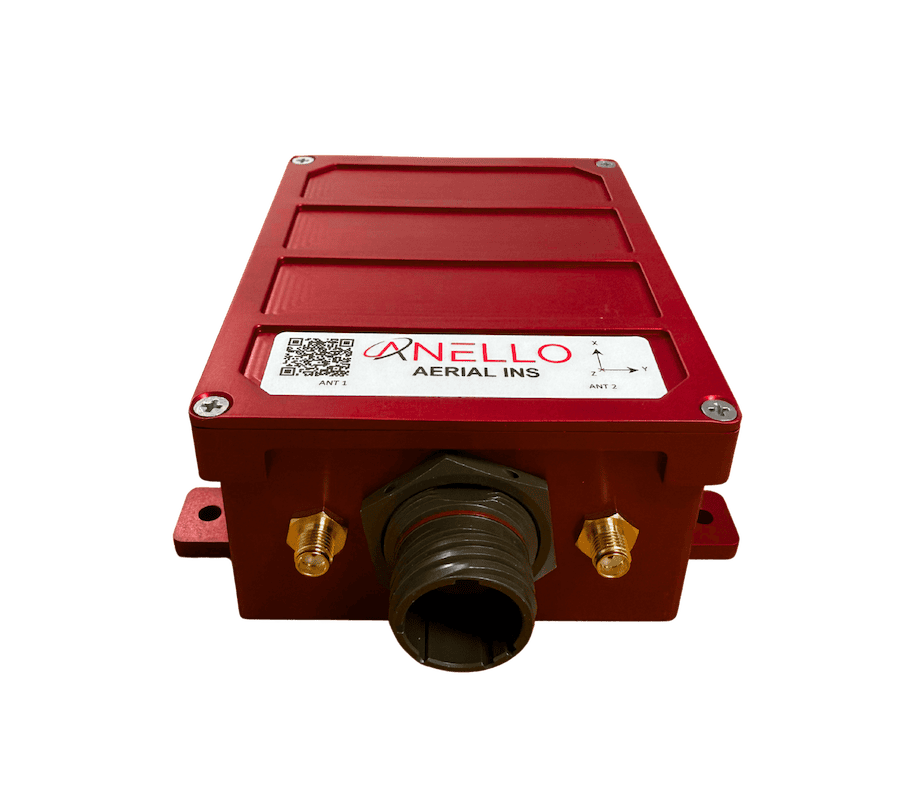
La navegación por satélite desempeña un papel vital en el guiado autónomo de los sistemas no tripulados aéreos, terrestres y de superficie. Los receptores GNSS, capaces de acceder a las constelaciones GPS, GLONASS, Galileo y/o BeiDou, proporcionan la referencia posicional necesaria para el seguimiento de waypoints, el geofencing y las operaciones coordinadas multiplataforma.

Piloto automático VECTOR-400 de UAV Navigation-Grupo Oesía
Las funciones GNSS avanzadas, como la cinemática en tiempo real (RTK) y el posicionamiento preciso de puntos (PPP), ofrecen una precisión de centímetros adecuada para maniobras de despegue, aterrizaje y acoplamiento autónomo de precisión. Las unidades GNSS de doble frecuencia y doble antena mejoran la robustez del posicionamiento y la estimación del rumbo, lo que permite a los vehículos mantener una orientación precisa incluso en entornos degradados por el GPS.
Sin embargo, el GNSS es vulnerable a la interferencia de señales, la suplantación de identidad y los efectos multitrayectoria, sobre todo en la guerra urbana, la guerra electrónica o las operaciones en interiores. Para mantener la continuidad de la misión, los sistemas de guiado autónomo emplean a menudo una integración GNSS/INS estrechamente acoplada, que permite a las plataformas pasar sin problemas del posicionamiento absoluto al relativo sin pérdida de control.
La navegación visual desempeña un papel crucial en entornos en los que las señales GNSS no están disponibles, son intermitentes o se interrumpen deliberadamente. Utilizando cámaras a bordo, LiDAR y, en ocasiones, radares, los sistemas no tripulados pueden interpretar su entorno y localizar su posición mediante la detección de características, el análisis del flujo óptico y la odometría visual.
Los algoritmos de localización y mapeo simultáneos (SLAM) permiten a los vehículos autónomos construir mapas tridimensionales detallados de su entorno en tiempo real y estimar simultáneamente su posición dentro de él. Este enfoque es fundamental para la navegación en interiores, las misiones subterráneas o la navegación a través de vegetación densa donde el GNSS no puede penetrar.
La navegación basada en la visión también admite la detección avanzada de obstáculos, la clasificación del terreno y el redireccionamiento dinámico. En los drones autónomos, la navegación visual se utiliza a menudo junto con los datos inerciales para apoyar el vuelo estacionario de precisión, el vuelo en interiores o el vuelo en zonas sin GPS. En el caso de los robots terrestres, la visión estereoscópica o las cámaras de detección de profundidad ayudan a interpretar las características de la superficie, los desniveles de las pendientes y los peligros inesperados.
El Edge Computing acelera el rendimiento de estos sistemas procesando los datos visuales a bordo, reduciendo la dependencia de los enlaces de comunicación y permitiendo la toma de decisiones en tiempo real para evitar colisiones y planificar trayectorias.
Los entornos submarinos presentan uno de los retos más complejos para el guiado autónomo. A falta de GPS/GNSS, los sistemas submarinos deben confiar en la navegación inercial, los registros de velocidad Doppler (DVL), el posicionamiento acústico o la referenciación del terreno basada en el sonar para determinar su posición y navegar con eficacia.

Sensor AHRS MEMS Certus Mini A de Advanced Navigation
Los sistemas inerciales, aunque esenciales, experimentan una deriva acumulativa con el tiempo. Para corregirlo, los AUV y UUV utilizan DVL para medir la velocidad relativa al fondo marino, y sistemas acústicos como las matrices de línea de base ultracorta (USBL), línea de base corta (SBL) y línea de base larga (LBL) para recibir referencias externas de posición. Estas referencias acústicas se integran a menudo con los INS de a bordo mediante filtros de Kalman para crear una solución de navegación híbrida con precisión y fiabilidad a largo plazo.
Los vehículos submarinos también emplean la navegación relativa al terreno (TRN), que utiliza un sonar orientado hacia delante o ecosondas multihaz para ajustar el perfil del fondo marino a mapas batimétricos conocidos. Esto permite una localización precisa en zonas donde los transpondedores acústicos no están disponibles o no son prácticos.
Estas tecnologías de guiado submarino son esenciales para operaciones como la inspección de tuberías, la cartografía del fondo marino, la exploración bajo el hielo y el atraque autónomo. Pueden diseñarse con arquitecturas tolerantes a la presión, de bajo consumo y totalmente cerradas, adecuadas para misiones de larga duración en aguas profundas o turbulentas.
Las plataformas de guiado autónomo pueden depender de marcos de fusión de sensores en tiempo real que integren datos de sensores inerciales, GNSS, fuentes visuales y otras entradas ambientales. Estos motores de fusión calculan una solución de navegación robusta y continuamente actualizada, garantizando que los vehículos no tripulados mantengan el control y el conocimiento de la situación en entornos complejos.
Los sistemas de guiado modernos pueden utilizar la predicción impulsada por IA para permitirles adaptarse a los parámetros de la misión, detectar fallos y peligros y reaccionar ante condiciones inesperadas con una latencia mínima. Esta autonomía es esencial para una amplia gama de casos de uso, como la coordinación de enjambres de vehículos aéreos no tripulados, la vigilancia marítima de largo alcance, las operaciones militares de alto riesgo y las tareas de inspección industrial en zonas remotas.
 Búsqueda de empresas y productos
Búsqueda de empresas y productos




 Suscríbete al boletín semanal de eBrief
Las últimas novedades en ingeniería y tecnología directamente en tu bandeja de entrada: únete a miles de ingenieros que ya las reciben.
Suscríbete al boletín semanal de eBrief
Las últimas novedades en ingeniería y tecnología directamente en tu bandeja de entrada: únete a miles de ingenieros que ya las reciben.

