Inertial Labs has launched the INS-BU, a high-performance INS (inertial navigation system) designed for a wide range of platforms including UAVs (unmanned aerial vehicles), UGVs (unmanned ground vehicles) and USVs (unmanned surface vessels).

Featuring a single-antenna U-Blox GNSS receiver that provides 1 cm RTK position from RTCM3 RTK corrections, it provides access to all major constellations and frequencies (GPS L1/L2, GLO L1/L2, GAL E1/E5, BDS B1/B2, and QZSS L1/L2).
The INS-BU is an effective, low-cost solution that uses a range of aiding data for different applications. With highly accurate navigation in GNSS-denied environments, utilizing Inertial Labs’ new enhanced Tunnel Guide algorithm, the INS-BU delivers a comprehensive GNSS-denied solution.
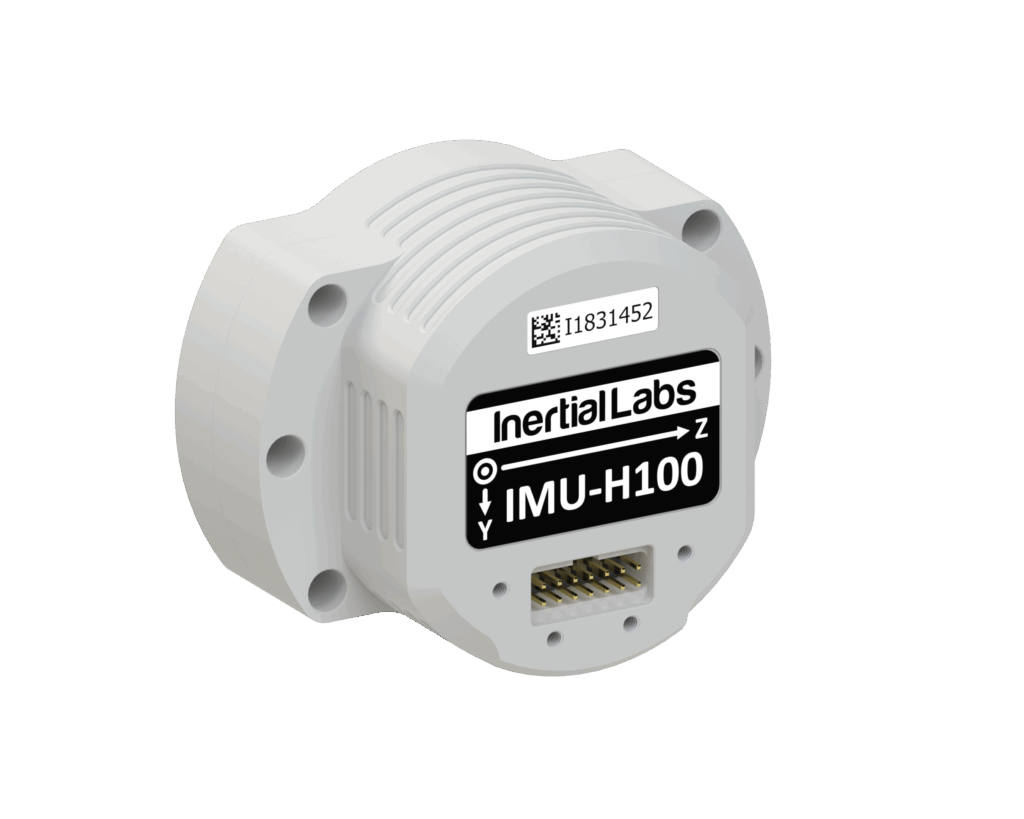
The INS-BU incorporates Inertial Labs’ miniAHRS, which utilizes 3-axes each of precision magnetometers, accelerometers, and gyroscopes to provide orientation of the device under measure. It contains cutting-edge algorithms for the motion of robots, unmanned and autonomous vehicles, and antennas. The miniAHRS’ mini fluxgate magnetometers have a distinct advantage over commonly used magneto-inductive or magneto-resistive alternatives and have been a trusted North reference for over 70 years.
With custom interfaces and a power consumption of 2.5W, the INS-BU is a versatile solution fit for a wide variety of users with power consumption restrictions. In addition, the INS-BU contains an on-board sensor fusion filter, state-of-the-art navigation, and guidance algorithms and calibration software. The on-board ZED-F9P receiver ensures the security of positioning and navigation information by using secure interfaces and advanced jamming and spoofing detection technologies.