EIVA LIVE webinar on the newly released solution Voyis VSLAM Powered by EIVA.
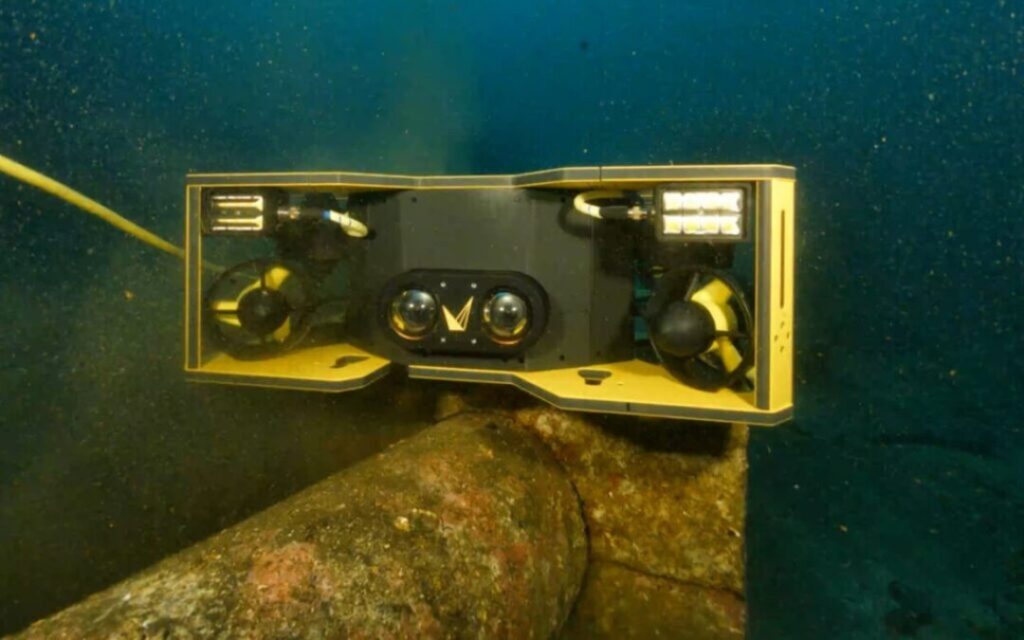
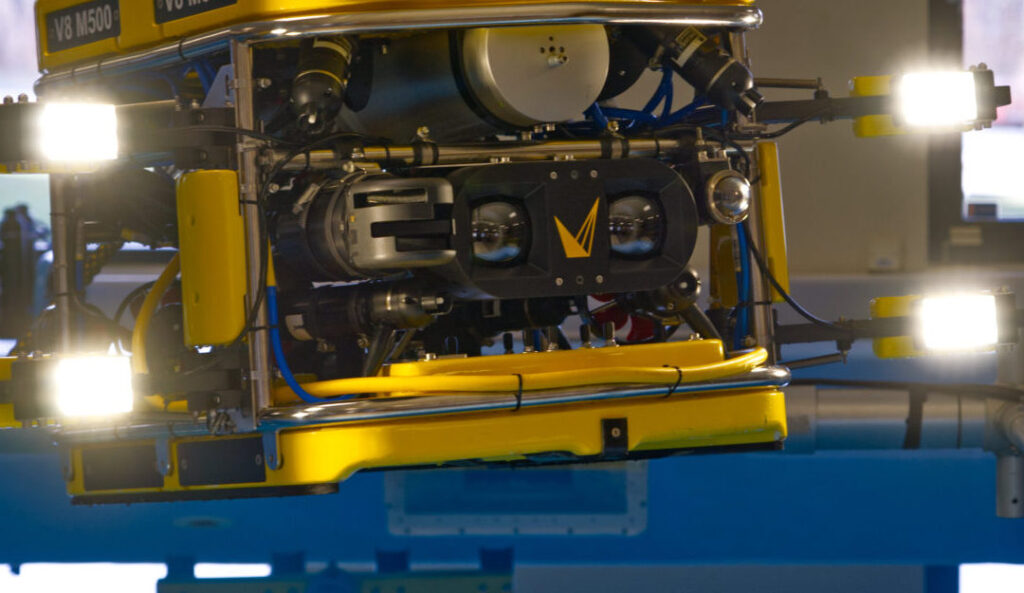
This computer vision solution leverages Voyis’ Discovery Stereo camera stills to provide real-time QC point cloud and trajectory displays in the NaviSuite user interface – enabling augmented ROV piloting and superior data acquisition in challenging subsea and near-asset environments. We will cover subjects such as:
- Challenges and benefits of using stereo cameras for subsea survey and inspection operations
- Examples of the output of our VSLAM solution: real-time 3D point clouds for quality control and augmented piloting
- Details of the VSLAM algorithm, integration with the Discovery Stereo Camera and with NaviSuite software for streamlined operations not requiring third-party software
- Use cases, including examples from a joint demo at the ORE Catapult Subsea and Marine testing facility
- How this solution is an important tool towards achieving subsea robotics true autonomy
Webinar presented by:
- Head of Offshore Energy at Voyis, Sean Elmer
- Business Development Manager – Subsea Robotics & AI at EIVA, Mike Gallo
Co-pilots:
- Survey Support & Training at EIVA, Maria Antônia Ribeiro
- Systems Integration Lead, Robotics & AI at EIVA, Hemanth Kanner
Duration: 1 hour incl Q&A sessions