






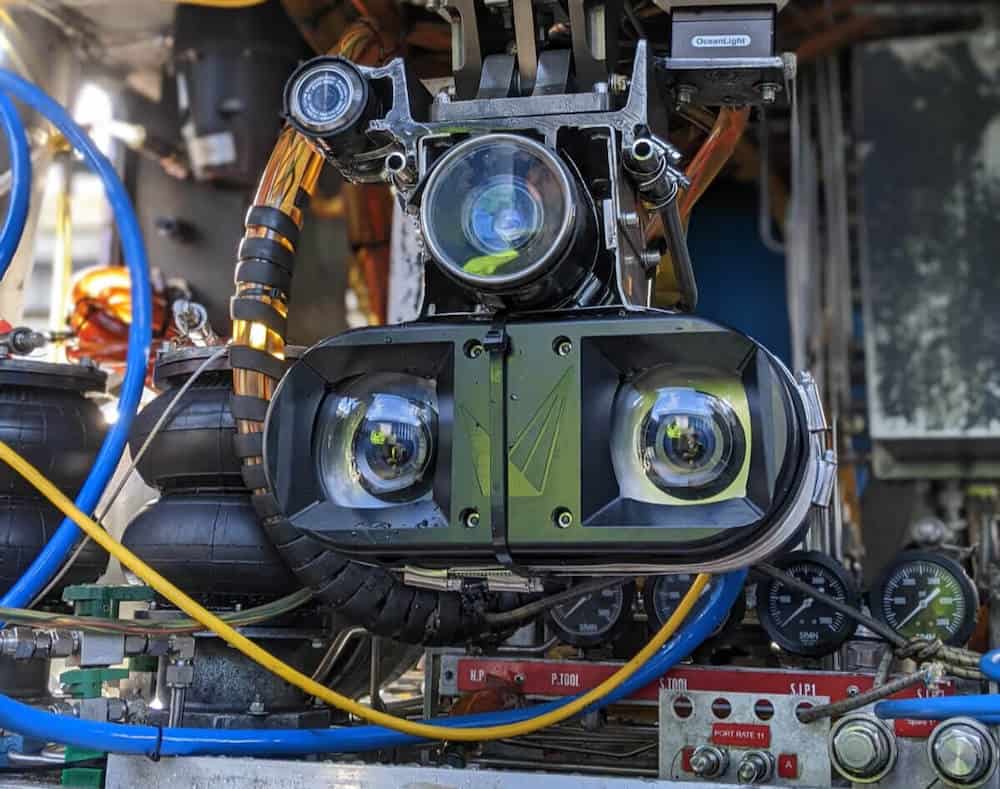

The Discovery Stereo Inspection System from Voyis is a compact stereo camera platform for underwater 3D modeling and computer vision. It provides real-time image enhancement, 4K video streaming, and point cloud generation via onboard edge computing.
Integrated Nova Mini lights deliver up to 250,000 lumens for illumination in low-visibility environments. The system captures 8.1MP stills at up to 30 FPS, outputs depth maps and point clouds via API, and supports data-centric DDS architecture for integration.
EIVA’s VSLAM software enables real-time 3D reconstruction and coverage mapping for inspection and navigation. Outputs include raw and processed images, video, IMU data, and 3D spatial information. Compatible with light and work-class ROVs, the Discovery Stereo System supports applications in vehicle autonomy, quality control, and general subsea survey tasks.
| Camera: |
Resolution - 2816 x 2816 (8.1MP) Colour sensor, 20 FPS (1:1), 30 FPS (16:9) |
| Field of View: | 75° x 75°, Fixed Focus |
| Operating Range: | 0.1m to 5.0m |
| Depth Rating: | 4000m or 300m |
| Onboard Processing: |
Image undistortion, color & lighting correction Depth maps: 1024 x 1024 |
| Data Outputs: |
Raw Images (12-bit .TIFF) Processed Images (8-bit .JPG) Video (H.264, MP4) IMU Data (CSV) *Depth maps and Point Cloud available through API |





