Veicoli subacquei senza equipaggio - UUV, AUV, ROV
Trova fornitori e produttori di veicoli subacquei senza equipaggio; UUV, AUV, ROV e alianti subacquei per applicazioni di rilevamento, ricerca e militari
Se progettate, costruite o fornite Veicoli subacquei senza equipaggio UUV, Crea un profilo per mettere in evidenza le tue competenze ed entrare in contatto con i visitatori che hanno un bisogno concreto delle tue soluzioni.
Veicoli subacquei senza equipaggio - UUV, AUV, ROV
Panoramica da
Sarah Simpson
Aggiornato:
Veicoli subacquei senza equipaggio UUV
I veicoli subacquei senza equipaggio, o UUV, noti anche come veicoli sottomarini senza equipaggio, sono veicoli in grado di operare mentre sono immersi sott’acqua senza la necessità che un essere umano li occupi fisicamente. Possono essere suddivisi in due categorie principali: veicoli telecomandati (ROV) e veicoli subacquei autonomi (AUV).
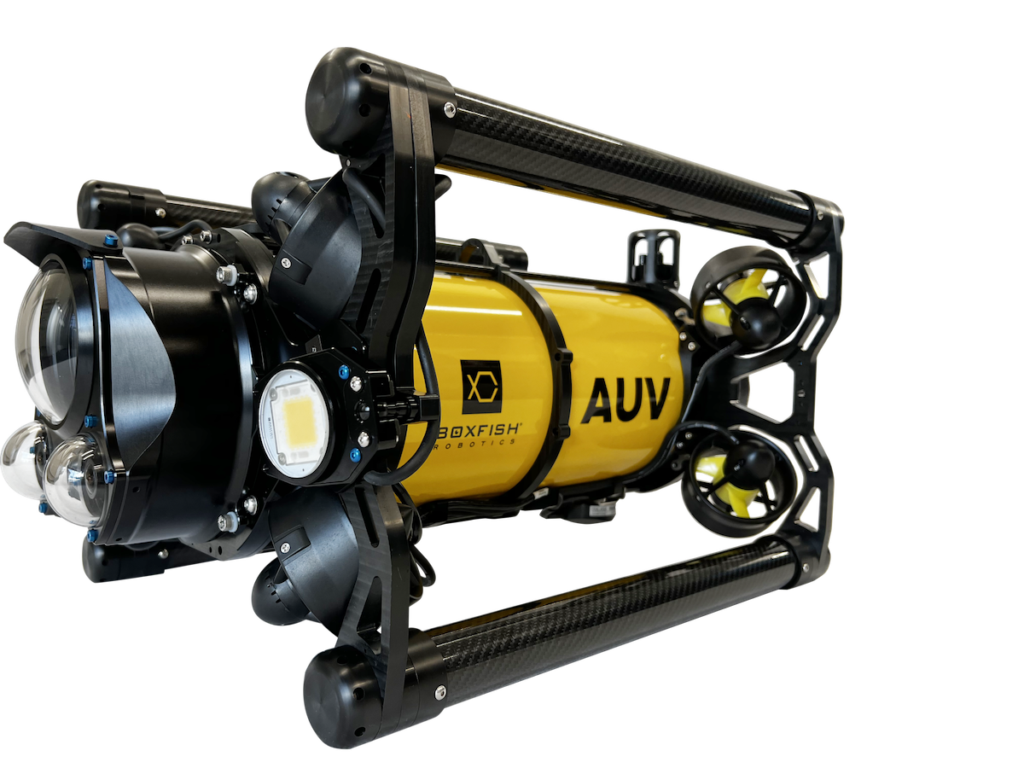
Veicoli subacquei autonomi (AUV)
I veicoli subacquei autonomi sono in grado di funzionare senza il controllo in tempo reale da parte di un operatore umano. Possono essere programmati per raccogliere dati lungo un percorso prestabilito e alcuni sono in grado di prendere decisioni e potenzialmente modificare i parametri della loro missione in base ai dati ricevuti.
A causa dell’attenuazione delle onde radio nell’acqua, gli AUV non possono fare affidamento sulla navigazione GPS diretta una volta immersi. È possibile utilizzare la navigazione a stima per stabilire una posizione approssimativa, anche se gli errori si accumulano rapidamente. Questa stima della posizione può essere ulteriormente migliorata con dati aggiuntivi provenienti da transponder acustici subacquei, posizioni GPS di riferimenti di superficie vicini o emersioni temporanee per stabilire una posizione GPS. Le stime di accelerazione e velocità possono essere calcolate utilizzando un’unità di misura inerziale e migliorate con un Doppler Velocity Log, un dispositivo simile a un sonar che misura la velocità di spostamento sul fondo marino.
Phantom 2 UUV/AUV di Dynautics
Metodi di propulsione per gli AUV
I metodi di propulsione più comuni per gli AUV sono i propulsori a elica e gli ugelli Kort, solitamente alimentati da motori elettrici. Gli AUV possono anche “scivolare” nell’acqua, modificando la galleggiabilità. alianti subacquei sono in grado di modificare la loro profondità e utilizzano ali aerodinamiche per convertire questo movimento in movimento in avanti.
ecoSUBm-Power+ v2 AUV di ecoSUB Robotics
Gli AUV sono ampiamente utilizzati per il rilevamento nell’industria petrolifera e del gas e nella ricerca scientifica. Sono utilizzati anche per applicazioni di difesa navale come il rilevamento di mine, il trasporto di carichi utili e la sorveglianza. Gli AUV militari sono stati collegati in rete con gli UAV (veicoli aerei senza pilota) per fornire una soluzione ISR (Intelligence, Surveillance and Reconnaissance) cross-domain per il campo di battaglia.
A differenza degli AUV, i ROV non sono in grado di funzionare senza il controllo in tempo reale da parte di un operatore umano. I ROV sono stati sviluppati per superare i limiti dei subacquei umani e dei veicoli subacquei con equipaggio umano. Sono azionati a distanza da un equipaggio a bordo di una nave vicina e collegati alla loro base operativa tramite un cavo ombelicale che fornisce sia un collegamento di sicurezza che un collegamento di alimentazione, comunicazione e dati. Gli ROV che operano in acque più profonde o più agitate sono inoltre dotati di un sistema di gestione del cavo (TMS), che regola la lunghezza del cavo per ridurre al minimo gli effetti della resistenza subacquea sul cavo stesso.
Gli ROV possono essere suddivisi in diverse classi in base alle loro dimensioni, al loro peso o alla loro funzione. Esistono diversi schemi di classificazione.
Veicoli di classe osservazione o ispezione
I ROV più piccoli sono spesso noti come veicoli di classe osservazione o ispezione, i più semplici dei quali possono trasportare solo una singola telecamera. I veicoli più sofisticati di questa classe possono anche essere dotati di sonar e altri sensori. Le profondità operative tipiche possono variare da diverse centinaia a diverse migliaia di piedi a seconda delle dimensioni del veicolo.
ROV di classe lavoro
All’altra estremità dello spettro si trovano i ROV di classe lavoro. Questi sono dotati di una pompa idraulica per fornire la potenza extra necessaria per le attrezzature aggiuntive e per la propulsione a profondità maggiori.
I ROV di classe lavoro sono in grado di azionare attrezzature più potenti come manipolatori e posacavi. I veicoli di questa classe sono stati progettati per operare a profondità fino a 30.000 piedi e anche oltre.