Tecnologia di guida autonoma per i veicoli senza pilota - UAV, USV, UGV, UUV
Trova i produttori di sistemi di guida per droni, che consentono alle piattaforme aeree, terrestri e marittime senza equipaggio di eseguire la navigazione autonoma, l'esecuzione di missioni adattive e la pianificazione di percorsi resilienti con un input umano minimo o nullo.
Se progettate, costruite o fornite Sistemi di guida, Crea un profilo per mettere in evidenza le tue competenze ed entrare in contatto con i visitatori che hanno un bisogno concreto delle tue soluzioni.
Tecnologia di guida autonoma per i veicoli senza pilota - UAV, USV, UGV, UUV
Panoramica da
Eleanor Widdows
Aggiornato:
I sistemi di guida autonoma consentono ai veicoli senza pilota che operano nei settori aereo, terrestre e marittimo di intraprendere la navigazione auto-diretta, l’adattamento alla missione in tempo reale e la pianificazione del percorso in modo resiliente senza l’intervento umano. Integrando i dati di più sensori e fonti di posizionamento, le architetture di guida UxV offrono un controllo di precisione e una consapevolezza della situazione, e alcune soluzioni funzionano anche in ambienti con segnali GNSS limitati o negati.
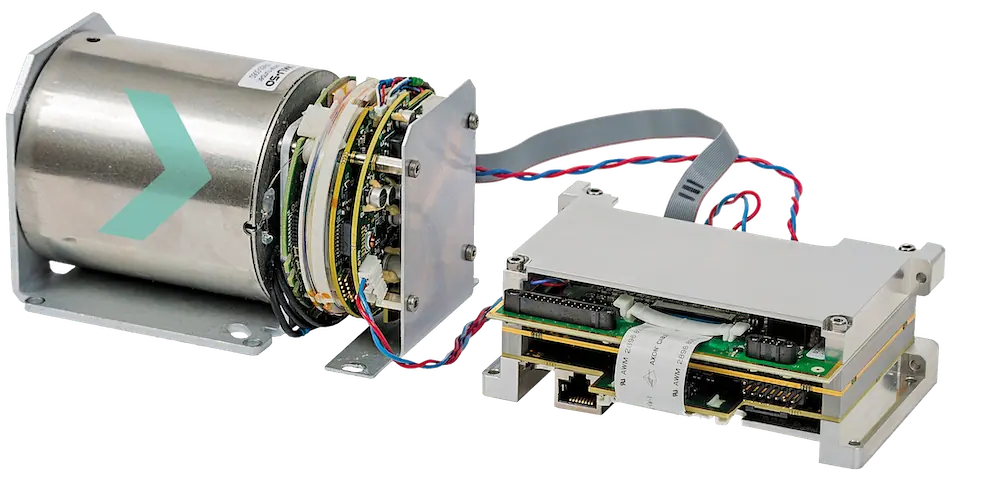
HGuide i700 MEMS IMU di Honeywell Aerospace.
La guida autonoma è essenziale per un’ampia gamma di piattaforme senza pilota, dai droni tattici e UAV di lunga durata agli UGV, AUV e UUV. Le tecnologie chiave utilizzate in queste soluzioni includono sensori inerziali, ricevitori GNSS/GPS, algoritmi di navigazione visiva e sistemi di navigazione sottomarina specializzati. Questi componenti sono spesso combinati attraverso la fusione di sensori per consentire prestazioni intelligenti, adattabili e resistenti alle missioni.
Sensori inerziali e sistemi di navigazione
I sensori inerziali sono fondamentali per molti sistemi di guida autonoma. Le unità di misurazione inerziale (IMU), che contengono accelerometri e giroscopi, forniscono misurazioni in tempo reale di velocità, accelerazione e velocità angolare. Questi flussi di dati consentono il tracciamento continuo della posizione e dell’assetto attraverso un processo noto come dead reckoning, permettendo alle piattaforme senza pilota di mantenere la navigazione durante le interruzioni del GNSS o le interferenze del segnale.
I sistemi di guida avanzati utilizzano IMU di tipo tattico o di navigazione, in grado di mantenere bassi tassi di deriva per periodi prolungati. Per gli UAV e gli UGV, la navigazione inerziale assicura la fedeltà del controllo durante le manovre dinamiche o quando si passa attraverso aree compromesse dal GPS, come tunnel, canyon o ambienti urbani. Per i veicoli subacquei, dove i segnali di navigazione esterni sono del tutto assenti, i sistemi inerziali servono come metodo primario per stimare la posizione tra i fix acustici.
Molte soluzioni di guida combinano i sensori inerziali con magnetometri, barometri e ricevitori GNSS, aumentando la precisione e migliorando la tolleranza agli errori. Le configurazioni IMU ridondanti e i supporti isolati dalle vibrazioni assicurano ulteriormente un funzionamento robusto nelle condizioni di forte urto e di alta vibrazione tipiche degli impieghi militari e aerospaziali.
Guida basata su GPS/GNSS
La navigazione satellitare svolge un ruolo fondamentale nella guida autonoma dei sistemi senza pilota a bordo, a terra e in superficie. I ricevitori GNSS – in grado di accedere alle costellazioni GPS, GLONASS, Galileo e/o BeiDou, forniscono il riferimento posizionale necessario per il tracciamento dei waypoint, il geofencing e le operazioni coordinate multipiattaforma.
Autopilota VECTOR-400 di UAV Navigation-Grupo Oesía.
Le funzionalità GNSS avanzate, come la cinematica in tempo reale (RTK) e il posizionamento preciso del punto (PPP), offrono un’accuratezza di livello centimetrico adatta alle manovre di precisione di decollo, atterraggio e aggancio autonomo. Le unità GNSS a doppia frequenza e a doppia antenna migliorano la robustezza del posizionamento e la stima della direzione, consentendo ai veicoli di mantenere un orientamento preciso anche in ambienti degradati dal GPS.
Tuttavia, il GNSS è vulnerabile al disturbo del segnale, allo spoofing e agli effetti di multipath, in particolare nella guerra urbana, nella guerra elettronica o nelle operazioni al chiuso. Per mantenere la continuità della missione, i sistemi di guida autonoma spesso impiegano un’integrazione GNSS/INS strettamente accoppiata, consentendo alle piattaforme di passare senza soluzione di continuità dal posizionamento assoluto a quello relativo senza perdita di controllo.
Navigazione basata sulla visione e SLAM
La navigazione visiva svolge un ruolo cruciale negli ambienti in cui i segnali GNSS non sono disponibili, sono intermittenti o vengono deliberatamente interrotti. Utilizzando telecamere a bordo, LiDAR e talvolta radar, i sistemi senza pilota possono interpretare l’ambiente circostante e localizzare la loro posizione attraverso il rilevamento di caratteristiche, l’analisi del flusso ottico e l’odometria visiva.
Gli algoritmi di localizzazione e mappatura simultanea (SLAM) consentono ai veicoli autonomi di costruire mappe 3D dettagliate dell’ambiente in tempo reale, stimando contemporaneamente la loro posizione all’interno di esso. Questo approccio è fondamentale per la navigazione in interni, per le missioni sotterranee o per la navigazione attraverso la vegetazione fitta, dove il GNSS non può penetrare.
La navigazione basata sulla visione supporta anche il rilevamento avanzato degli ostacoli, la classificazione del terreno e il reindirizzamento dinamico. Nei droni autonomi, la navigazione visiva è spesso utilizzata insieme ai dati inerziali per supportare l’hovering di precisione, il volo al chiuso o il volo in zone prive di GPS. Per i robot terrestri, la visione stereo o le telecamere che rilevano la profondità aiutano a interpretare le caratteristiche della superficie, le pendenze e i pericoli imprevisti.
L’edge computing accelera le prestazioni di questi sistemi elaborando i dati visivi a bordo, riducendo la dipendenza dai collegamenti di comunicazione e consentendo di prendere decisioni in tempo reale per evitare le collisioni e pianificare il percorso.
Guida sottomarina per AUV e UUV
Gli ambienti sottomarini rappresentano una delle sfide più complesse per la guida autonoma. In assenza di GPS/GNSS, i sistemi sottomarini devono affidarsi alla navigazione inerziale, ai registri di velocità Doppler (DVL), al posizionamento acustico o alla referenziazione del terreno basata sul sonar per determinare la loro posizione e navigare in modo efficace.
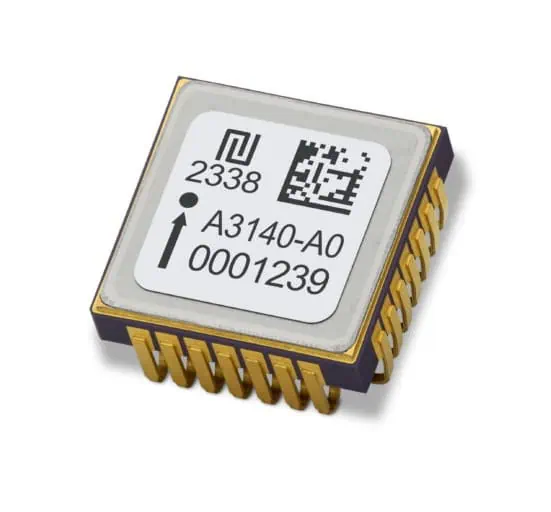
Sensore MEMS AHRS Certus Mini A di Advanced Navigation.
I sistemi inerziali, pur essendo essenziali, subiscono una deriva cumulativa nel tempo. Per correggere questo fenomeno, gli AUV e gli UUV utilizzano i DVL per misurare la velocità rispetto al fondo marino e i sistemi acustici come gli array Ultra-Short Baseline (USBL), Short Baseline (SBL) e Long Baseline (LBL) per ricevere le correzioni di posizione esterne. Questi riferimenti acustici sono spesso integrati con l’INS di bordo tramite filtri Kalman per creare una soluzione di navigazione ibrida con precisione e affidabilità a lungo termine.
La navigazione terra-relativa (TRN) viene impiegata anche dai veicoli sottomarini, utilizzando sonar forward-looking o ecoscandagli multibeam per far corrispondere il profilo del fondale marino a mappe batimetriche note. Ciò consente una localizzazione precisa in aree in cui i transponder acustici non sono disponibili o pratici.
Queste tecnologie di guida sottomarina sono essenziali per operazioni come l’ispezione delle condutture, la mappatura del fondo marino, l’esplorazione sotto i ghiacci e l’attracco autonomo. Possono essere progettate con architetture tolleranti alla pressione, a basso consumo e completamente chiuse, adatte a missioni di lunga durata in acque profonde o turbolente.
Autonomia integrata e fusione di sensori
Le piattaforme di guida autonoma possono affidarsi a strutture di fusione dei sensori in tempo reale che integrano i dati provenienti da sensori inerziali, GNSS, fonti visive e altri input ambientali. Questi motori di fusione calcolano una soluzione di navigazione robusta e continuamente aggiornata, assicurando che i veicoli senza pilota mantengano il controllo e la consapevolezza della situazione in ambienti complessi.
I moderni sistemi di guida possono utilizzare la previsione guidata dall’intelligenza artificiale per consentire loro di adattarsi ai parametri della missione, rilevare guasti e pericoli e reagire a condizioni inaspettate con una latenza minima. Questa autonomia è essenziale per un’ampia gamma di casi d’uso, tra cui il coordinamento di sciami di UAV, la sorveglianza marittima a lungo raggio, le operazioni militari ad alto rischio e le attività di ispezione industriale in aree remote.
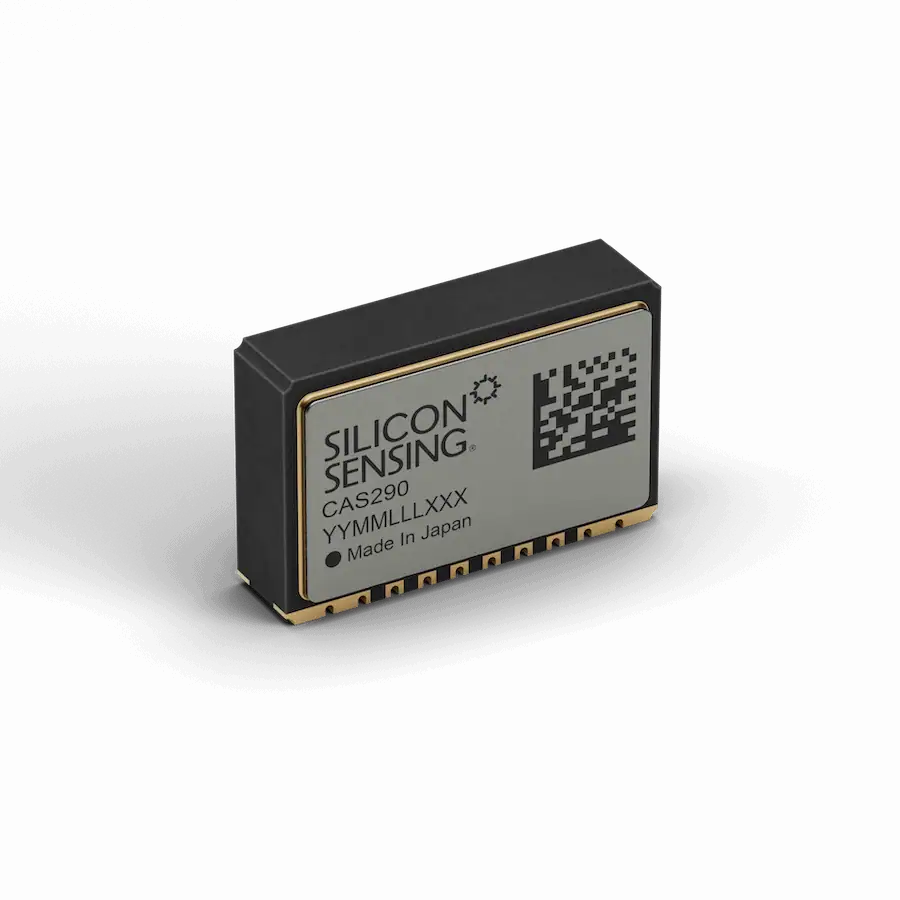
Silicon Sensing amplia la sua partnership di distribuzione di lunga data con Althen per rafforzare la copertura del Nord America e migliorare l'accesso globale ai suoi sensori inerziali ad alte prestazioni e alla sua esperienza di integrazione
Il programma VANTAGE, sostenuto dal Fondo Europeo per la Difesa, mira a fornire una piattaforma tattica europea di droni modulare e interoperabile per le moderne missioni di difesa e sicurezza