In the article below, Amanda Lind from Blue Marble Geographics describes how Global Mapper’s new pole classification tool works, as well as offering settings recommendations.
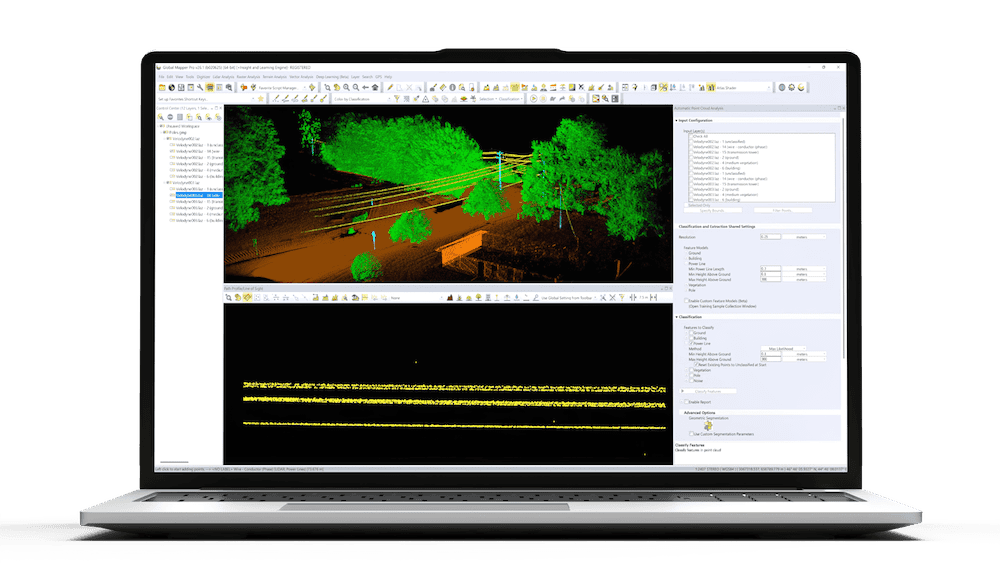
Segmentation is an ideal classification method for point cloud data generated from imagery collected via UAVs. Global Mapper has a robust segmentation toolset and has recently added a prebuilt method for classifying poles in the new release of version 24.1.
This tool works by identifying cylindrical patterns in the point cloud, similar to how flat planes are used to identify walls in buildings. Compared to the old pole classification method in Global Mapper, the new tool uses the segmentation method to identify features in the point clouds based on their shape and attributes. This post describes how the tool works and offers settings recommendations. You don’t need to know how segmentation works to use the tool, but it’s interesting!
How segmentation is used to find poles
Segmentation is a classification method that is built (and better suited) for how modern lidar is collected. Originally, lidar was collected with a sparse aerial sensor, and that is what the older tools, like the gridded option, were built for. However, modern lidar tends to be very dense. It is often collected by sensors mounted on things other than planes, such as terrestrial data from tripods or cars or aerially from drones.
Terrestrial lidar is captured from sensors at ground level. In this top-down view of a city block, you can see empty holes where the sensor was placed. This type of data collection is denser and differently structured than aerial lidar, which impacts which method should be used for classification.
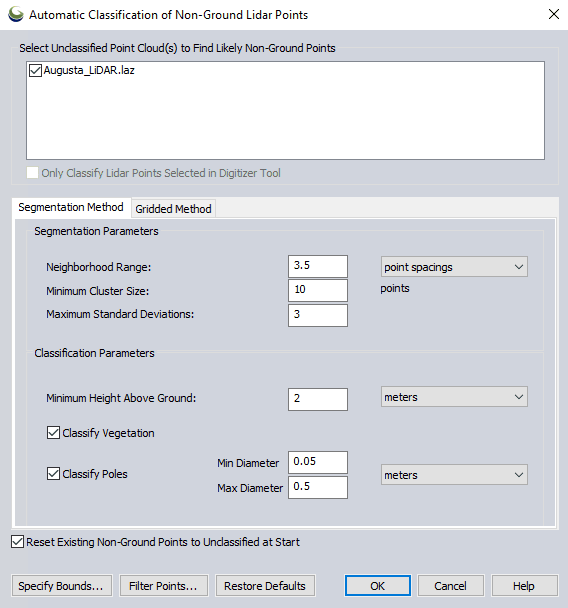
Technically, if you’re interested in doing this the hard way, power poles can also be classified in the original segmentation tool. Most of the options and settings are there. For example, cylinders/poles have a specific curvature value, among other attributes. The benefit of using this new option instead is that the settings are already tailored to look for pole structures. It also includes the ability to filter by pole diameter and automatically filter by height to weed out other cylindrical objects that are not poles. More information on how segmentation works, in general, can be found here.
Under the hood (that is to say, in Global Mapper’s programming), pole classification runs at the same time as building classification. Surfaces in the point cloud are measured for Curvature values, which are used to see if surfaces are very curved (poles) or very flat (buildings). Points left over from this classification are then considered for vegetation.
Settings Tips
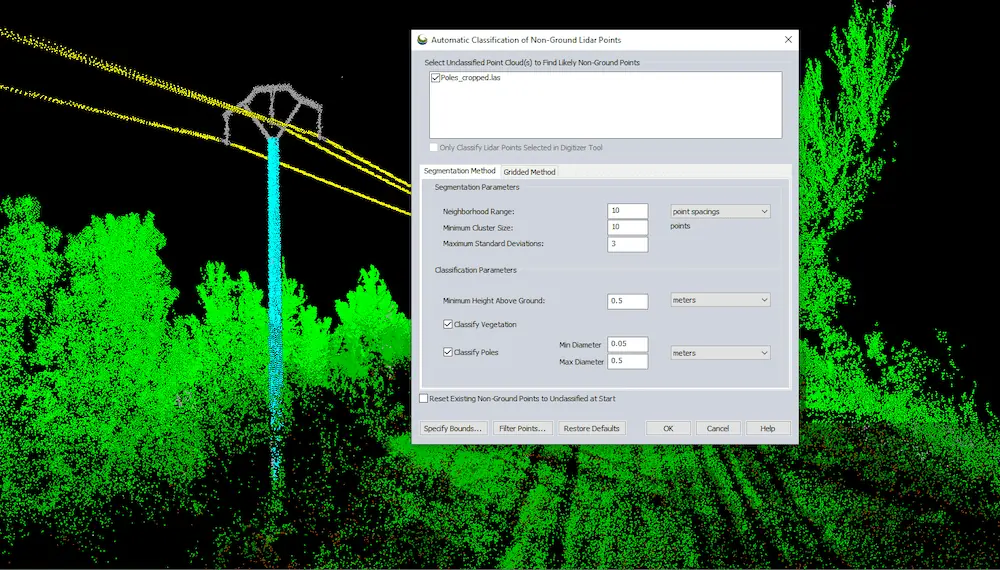
The minimum and maximum settings are used to help differentiate poles from trees. Cylinder features that are outside of these set values will not be classified. Use the measure tool to measure your pole in the data to acquire this value.
Trees are often measured at the same height above ground, called Diameter at Breast Height (DBH). Power poles, functionally unlike trees, are typically uniform in diameter, so pole diameter is assumed to be constant over the pole and isn’t measured at a certain height above ground. However, you still want to classify ground points because height above ground is used when measuring pole height to verify that it is indeed a pole and something shorter such as a bollard.
As with any classification, be sure to classify noise and ground points first.
Keep the point spacing (neighborhood range) large enough that the poles are still visible. For example, if you are only looking at a 0.1- meter patch, a telephone pole will look pretty flat instead of the cylinder we are looking to classify.
Building points will be searched for and classified every time the tool is run. Classify your pole points first, then turn them off with the Filter Lidar tool before working on building classification. Sometimes the neighborhood range (and stuff) that works best for classifying poles is different from what works for buildings. This changes based on your data, as every point cloud differs based on how and what was collected. These settings are how you tell Global Mapper what to expect with your specific data.
Learn more about exciting new functionality in Global Mapper v24.1 by downloading a free 14-day trial today and testing the program on your own.