Sistemas e componentes de gestão de tráfego não tripulado (UTM)
À medida que o espaço aéreo se torna cada vez mais populoso com sistemas aéreos não tripulados (UAS), cresce a procura por uma coordenação segura, escalável e eficiente. A Gestão de Tráfego Não Tripulado (UTM) é uma estrutura especializada projetada para gerenciar o tráfego de drones, especialmente em ambientes complexos e de baixa altitude.
Se você projeta, constrói ou fornece Gestão de tráfego não tripulado, Crie um perfil para mostrar as suas competências e entrar em contacto com visitantes que tenham uma necessidade real das suas soluções.
Sistemas e componentes de gestão de tráfego não tripulado (UTM)
Visão geral por
Sarah Simpson
Atualizado:
A Gestão de Tráfego Não Tripulado (UTM) é um ecossistema digital concebido para gerir as operações de drones em espaço aéreo não controlado, eliminando a necessidade de controladores de tráfego aéreo humanos. Permite operações além da linha de visão (BVLOS) e operações complexas com vários drones, coordenando serviços de planeamento de voo, autorização, monitorização e resolução de conflitos.
O sistema UTM funciona como uma interface entre operadores de drones, prestadores de serviços e autoridades reguladoras, garantindo segurança, conformidade e eficiência no espaço aéreo não tripulado.
O UTM difere dos sistemas tradicionais de gestão do tráfego aéreo por ser mais distribuído, depender fortemente da automação e integrar uma variedade de tecnologias embarcadas e baseadas em infraestrutura.
Tecnologias e componentes essenciais dos sistemas UTM
A eficácia de um sistema UTM depende de uma variedade de tecnologias a bordo, de comunicação e terrestres. Esses componentes trabalham juntos para fornecer rastreamento em tempo real, resolução de conflitos de tráfego e conformidade regulatória.
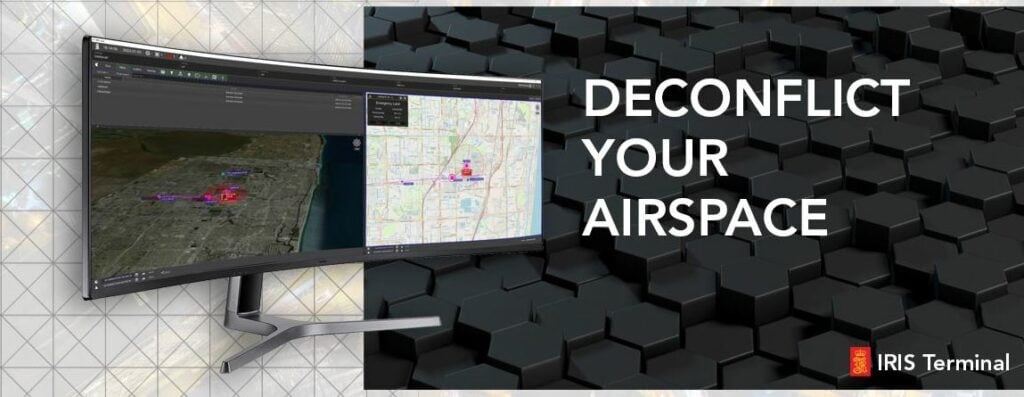
Plataforma de visualização do espaço aéreo, IRIS Terminal, da Kongsberg Geospatial
A tecnologia ADS-B é a base das capacidades de deteção e prevenção de colisões de drones no UTM. Existem dois tipos principais:
ADS-B Out: transmite dados de posição, velocidade e identificação do drone.
ADS-B In: recebe dados de outras aeronaves para fornecer consciência situacional.
Muitas aeronaves não tripuladas avançadas estão equipadas com transponders ADS-B, enquanto os recetores ADS-B e os equipamentos ADS-B servem como ferramentas de vigilância tanto para drones como para estações terrestres. O ADS-B é especialmente crucial para permitir operações de drones além da linha de visão (BVLOS), permitindo uma integração perfeita no espaço aéreo partilhado.
A identificação remota fornece informações de identificação e localização de drones em voo, semelhante a uma matrícula digital. Isso é exigido por várias autoridades aeronáuticas nacionais e está integrado aos sistemas UTM para manter a transparência e garantir a conformidade.
Sistemas de prevenção e anticolisão
Os sistemas de prevenção de colisões, por vezes combinados com algoritmos de aviso de colisão, ajudam a detetar aeronaves ou obstáculos próximos usando radar, sensores de visão, ou LiDAR. Estas tecnologias permitem a resolução de conflitos assistida por UTM ou totalmente autónoma, fundamental em ambientes densos ou dinâmicos.
Transponders para drones e módulos de comunicação UTM
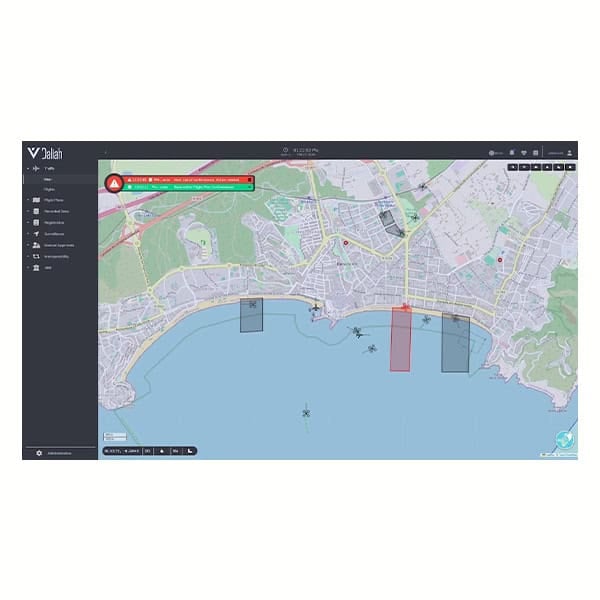
O AAM OptiX™ da ResilienX fornece infraestrutura digital de nível aeronáutico
Equipar aeronaves não tripuladas com transponders específicos para drones garante a interoperabilidade com os sistemas de monitorização do espaço aéreo. Esses dispositivos geralmente combinam ADS-B, identificação remota e outros protocolos de telemetria em pacotes compactos e leves.
Infraestrutura terrestre e prestadores de serviços UTM
O UTM depende de uma rede distribuída de prestadores de serviços terrestres que lidam com autorizações de espaço aéreo, envio de planos de voo, geofencing e alertas de tráfego em tempo real. Esses sistemas integram-se às autoridades aeronáuticas nacionais e às zonas de controlo do espaço aéreo local para fazer cumprir as regras e garantir a segurança.
Regulamentação UTM e estruturas globais
Os governos e organismos internacionais estão a alinhar-se em normas para unificar a tecnologia UTM. Exemplos incluem:
Iniciativas UTM da FAA (EUA): A FAA emitiu diretrizes sobre identificação remota e colabora com a NASA na implementação do UTM para operações urbanas e com drones além da linha de visão (BVLOS).
U-space (UE): No âmbito da Empresa Comum SESAR, a iniciativa U-space da UE define serviços digitais para a gestão do tráfego de sistemas aéreos não tripulados.
Esforços globais: A ICAO e outros organismos estão a trabalhar na padronização para permitir que os sistemas UTM de drones operem além-fronteiras sem conflitos.
Aplicações da tecnologia UTM
Os sistemas UTM são utilizados em entregas comerciais por drones, inspeção de infraestruturas, resposta a emergências e são cada vez mais utilizados na mobilidade aérea urbana (UAM). Esses casos de uso geralmente exigem coordenação entre vários drones e altos níveis de complexidade do espaço aéreo, enfatizando ainda mais a necessidade de um gerenciamento robusto do UTM.
Tendências emergentes e desenvolvimento futuro
O futuro do gerenciamento de tráfego não tripulado está sendo moldado por fatores tecnológicos, regulatórios e de mercado:
Inteligência artificial na coordenação do espaço aéreo: a IA e a aprendizagem automática estão a ser utilizadas para prever potenciais conflitos e otimizar as trajetórias de voo.
Integração com a aviação tripulada: estão a ser envidados esforços para ligar o UTM aos sistemas tradicionais de gestão do tráfego aéreo (ATM), especialmente onde as operações com linha de visão visual (VLOS) e além da linha de visão visual (BVLOS) convergem.
Controlo de tráfego em escala urbana: Sistemas UTM avançados estão a ser projetados para gerenciar frotas de drones nas cidades, com ajustes em tempo real feitos com base nas condições meteorológicas, obstáculos e zonas de exclusão aérea.
Miniaturização e modularidade: Transponders ADS-B e módulos de piloto automático de última geração estão a ser desenvolvidos para se adequarem a UAVs menores sem comprometer a funcionalidade.
Um cenário em maturação
A gestão do tráfego não tripulado é crucial para integrar os drones no espaço aéreo moderno, especialmente à medida que os sistemas de aeronaves não tripuladas assumem papéis cada vez mais críticos nas operações comerciais e públicas. Ao aproveitar uma combinação de tecnologia a bordo, incluindo sistemas de piloto automático, hardware ADS-B, identificação remota e ferramentas de prevenção de colisões, juntamente com sofisticados sistemas UTM baseados em terra, os operadores podem realizar operações com drones seguras, escaláveis e em conformidade. À medida que o panorama regulatório continua a evoluir e as tecnologias amadurecem, o UTM servirá como base para a próxima geração de gestão de tráfego de sistemas aéreos não tripulados.
A Sunhillo Corporation juntou-se à ResilienX no programa MICH-AIR BVLOS System, fornecendo a fusão de vigilância SureLine baseada na nuvem de radar e ADS-B para operações de aeronaves tripuladas e autónomas
A ResilienX foi escolhida pela Battle Creek Unlimited para fornecer um sistema de deteção e evitação baseado em terra e um ambiente operacional digital, permitindo operações BVLOS de rotina e apoiando aeronaves remotas e autónomas no centro de mobilidade aérea avançada MICH-AIR no Michigan