Navigazione e posizionamento senza GNSS per sistemi senza pilota
Trova fornitori, produttori e sviluppatori di tecnologie di navigazione senza GNSS. I sistemi di navigazione e posizionamento senza GNSS consentono alle piattaforme senza pilota di operare in modo affidabile quando i segnali di navigazione satellitari non sono disponibili, sono degradati o vengono intenzionalmente disturbati. Queste tecnologie sono fondamentali per garantire il posizionamento, la navigazione e la sincronizzazione in ambienti contesi, affollati e privi di segnali nei domini aereo, terrestre, di superficie e sottomarino.
Se progettate, costruite o fornite Navigazione e posizionamento senza GPS/GNSS, Crea un profilo per mettere in evidenza le tue competenze ed entrare in contatto con i visitatori che hanno un bisogno concreto delle tue soluzioni.
Navigazione e posizionamento senza GNSS per sistemi senza pilota
Panoramica da
Eleanor Widdows
Aggiornato:
La tecnologia di navigazione e posizionamento senza GNSS consente ai sistemi senza pilota di determinare la posizione, la velocità e l’orientamento senza fare affidamento sul GPS o altri segnali di navigazione satellitare. Queste tecnologie sono fondamentali poiché le piattaforme senza pilota aeree, terrestri, di superficie e subacquee sono sempre più spesso chiamate a operare in ambienti in cui il GNSS non è disponibile, è degradato o viene deliberatamente disturbato da interferenze o spoofing.
Utilizzando sensori di bordo, elaborazione dati e metodi di navigazione alternativi, la navigazione senza GNSS fornisce un posizionamento resiliente nei canyon urbani, negli spazi interni e sotterranei, negli ambienti marittimi e in condizioni elettromagnetiche difficili. Questo approccio supporta l’autonomia sicura, la continuità della missione e l’affidabilità operativa quando la navigazione satellitare non è disponibile o non è affidabile.
Suite di navigazione senza GPS a triplo strato per UAV di Honeywell Aerospace.
Dove è necessaria la navigazione senza GNSS
Difesa e operazioni in zone contese
La navigazione senza GNSS consente un posizionamento sicuro per i sistemi senza pilota che operano in condizioni di interferenza GPS, spoofing e attacchi elettronici. Gli UAV militari e altre piattaforme si affidano a queste capacità per mantenere la continuità della navigazione in spazi aerei contesi e ambienti elettromagnetici ostili.
Autonomia in ambienti urbani e costruiti
I veicoli autonomi che operano nei canyon urbani devono affrontare il blocco del segnale e le interferenze multipath causate dagli edifici. La navigazione senza GNSS consente il funzionamento sicuro delle piattaforme aeree e terrestri quando la navigazione satellitare continua non è disponibile.
Operazioni di ricerca e soccorso
La navigazione senza GNSS consente ai sistemi senza pilota di operare in ambienti interni, sotterranei o in aree colpite da calamità dove le infrastrutture sono danneggiate o non disponibili. Queste capacità consentono una navigazione efficace in strutture crollate, gallerie e terreni urbani densamente popolati.
Operazioni marittime e subacquee
Gli ambienti subacquei e costieri sono intrinsecamente privi di disponibilità GNSS. Veicoli subacquei autonomi e piattaforme di superficie si affidano a metodi di navigazione che non utilizzano il GNSS per mantenere un posizionamento accurato durante missioni di lunga durata.
Autonomia commerciale e industriale
Le applicazioni industriali come la robotica di magazzino, le operazioni minerarie, le attività offshore e l’ispezione delle infrastrutture traggono vantaggio dalla navigazione senza GNSS. Questi ambienti richiedono un posizionamento affidabile indipendente dai segnali esterni per migliorare la sicurezza e l’efficienza operativa.
Tipi di sistemi di navigazione senza GNSS
Sistemi di navigazione inerziale
I sistemi di navigazione inerziale forniscono un posizionamento autonomo calcolando il movimento dai sensori inerziali di bordo. Questi sistemi funzionano indipendentemente dai segnali esterni, rendendoli una funzionalità fondamentale per la navigazione senza GNSS su piattaforme senza pilota aeree, terrestri, di superficie e subacquee.
Unità di misura inerziale
Le unità di misura inerziale combinano accelerometri e giroscopi per misurare l’accelerazione lineare e il movimento rotatorio. Le IMU sono componenti fondamentali della navigazione senza GNSS, in quanto forniscono dati ad alta velocità per la navigazione a stima, la stima dell’assetto e il tracciamento del movimento.
Sistemi di navigazione integrati GNSS/INS
I sistemi GNSS/INS integrano strettamente la navigazione inerziale con la navigazione satellitare, quando disponibile, consentendo transizioni senza soluzione di continuità tra operazioni assistite da GNSS e operazioni senza GNSS. In ambienti contesi o degradati, il sottosistema inerziale mantiene la navigazione continua filtrando e rifiutando gli input GNSS danneggiati, rendendo il GNSS/INS un’architettura primaria per una navigazione resiliente e sicura.
Sistema di navigazione inerziale Marins M5 GNSS-Denied INS FOG di Exail.
Orologi atomici su chip
Gli orologi atomici su chip forniscono riferimenti temporali di bordo altamente stabili che riducono la deriva della navigazione inerziale durante interruzioni prolungate del GNSS. Quando integrati con sistemi GNSS/INS e inerziali, questi orologi migliorano la precisione a lungo termine e la resilienza temporale senza sincronizzazione esterna.
Sistemi di navigazione basati sulla visione
I sistemi di navigazione basati sulla visione utilizzano telecamere ottiche ed elaborazione a bordo per stimare il movimento tracciando le caratteristiche visive dell’ambiente. Questi sistemi sono particolarmente adatti alle operazioni in assenza di GNSS in ambienti urbani, interni e a bassa quota con una struttura visiva sufficiente.
Sistemi di localizzazione e mappatura simultanea
I sistemi di localizzazione e mappatura simultanea consentono alle piattaforme senza pilota di costruire mappe di ambienti sconosciuti stimando la loro posizione al loro interno. I sistemi SLAM supportano la navigazione autonoma in condizioni di impossibilità di utilizzo del GNSS, dove non sono disponibili mappe precedenti o riferimenti assoluti.
Sistemi di navigazione Lidar
Lidar I sistemi di navigazione utilizzano il rilevamento laser attivo per generare dati ambientali tridimensionali per la localizzazione e la mappatura. Questi sistemi supportano la navigazione ad alta precisione in ambienti in cui il GNSS non è disponibile, comprese condizioni di scarsa illuminazione o visibilità ridotta.
Sistemi di navigazione radar
I sistemi di navigazione radar forniscono un rilevamento e una localizzazione affidabili in ambienti influenzati da condizioni meteorologiche avverse, polvere, fumo o scarsa visibilità. La navigazione basata su radar è comunemente utilizzata su piattaforme marittime e aeree che richiedono capacità a lungo raggio, in tutte le condizioni atmosferiche e in assenza di GNSS.
Sistemi di navigazione magnetica
I sistemi di navigazione magnetica sfruttano le variazioni spaziali del campo magnetico terrestre per consentire il posizionamento senza GNSS. Se abbinati a mappe magnetiche, questi sistemi offrono una navigazione passiva in ambienti in cui altre modalità di rilevamento sono limitate.
Sistemi di navigazione con riferimento al terreno
I sistemi di navigazione con riferimento al terreno stimano la posizione correlando i dati dei sensori di bordo con mappe digitali del terreno o dell’altitudine memorizzate. Questi sistemi sono efficaci per piattaforme aeree e terrestri a bassa quota che operano in regioni prive di GNSS con terreno ben caratterizzato.
Sistemi di navigazione celeste
I sistemi di navigazione celeste determinano la posizione osservando le stelle o altri riferimenti celesti. Questi sistemi supportano missioni di lunga durata in cui il GNSS non è disponibile e non sono disponibili indicazioni di navigazione terrestre e segnali satellitari.
Sistemi di navigazione multisensoriali
I sistemi di navigazione multisensoriali integrano input inerziali, GNSS/INS, visivi, lidar, radar, magnetici e basati sul terreno. Combinando modalità di rilevamento complementari, questi sistemi migliorano la robustezza e la continuità in diversi ambienti privi di GNSS.
Software di fusione dei sensori
Il software di fusione dei sensori combina i dati provenienti da più sensori di navigazione in una soluzione di navigazione unificata. Questi algoritmi sono essenziali per gestire l’incertezza, correggere la deriva e mantenere un posizionamento affidabile durante le interruzioni o gli attacchi al GNSS.
Sistemi di navigazione sicuri e resilienti
I sistemi di navigazione sicuri sono progettati per funzionare anche in presenza di interferenze, spoofing e degrado del segnale GNSS. Questi sistemi enfatizzano il monitoraggio dell’integrità, il rilevamento dei guasti e le prestazioni resilienti per supportare operazioni senza pilota mission-critical in ambienti contesi.
Confronto e compromessi
La scelta di un approccio di navigazione senza GNSS comporta compromessi tra precisione, autonomia, costo, dimensioni, peso e potenza. I sistemi di navigazione inerziale sono compatti e autonomi, ma soggetti a errori cumulativi. La navigazione basata sulla visione offre un’elevata precisione relativa, ma dipende dalla visibilità ambientale e dalle risorse di elaborazione.
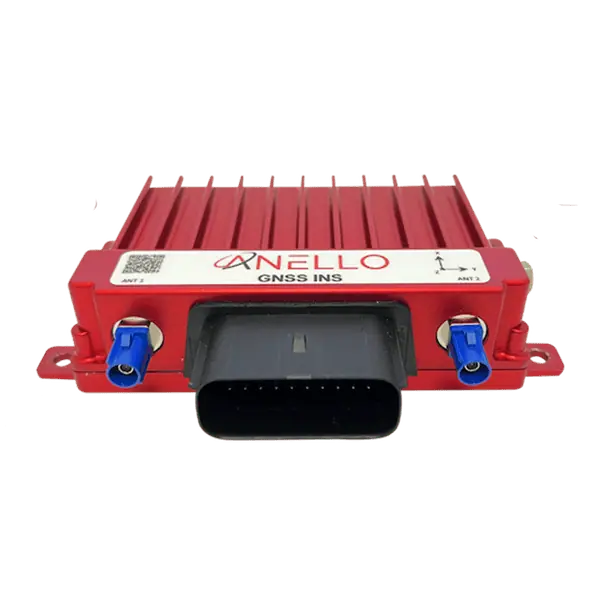
GNSS INS senza GPS di ANELLO Photonics.
I sensori Lidar e radar garantiscono indipendenza dall’ambiente, ma aumentano la complessità del sistema e i requisiti di alimentazione. La navigazione magnetica e la navigazione con riferimento al terreno dipendono dalla disponibilità e dalla qualità delle mappe ambientali. I sistemi multisensoriali offrono la massima resilienza, ma richiedono algoritmi di integrazione e navigazione avanzati.
Anche il tipo di piattaforma influenza la scelta del sistema. I sistemi di navigazione UAV danno la priorità a sensori leggeri e velocità di aggiornamento elevate, mentre le piattaforme terrestri e marittime possono ospitare sensori più grandi. I sistemi di navigazione subacquea privilegiano la stabilità a lungo termine e la bassa deriva in assenza di aggiornamenti esterni.
Norme e considerazioni rilevanti
Le tecnologie di navigazione senza GNSS per i sistemi senza pilota sono spesso in linea con le norme di difesa e aerospaziali che regolano le prestazioni di navigazione, la resilienza e la sicurezza. Gli standard pertinenti includono specifiche militari che riguardano il posizionamento garantito, la compatibilità elettromagnetica e la resilienza contro le interferenze e lo spoofing. L’interoperabilità e la modularità sono considerazioni essenziali per l’integrazione nelle architetture dei sistemi senza pilota esistenti.
Le soluzioni di navigazione garantite danno sempre più importanza alla sicurezza informatica, all’integrità del segnale e alla robustezza contro gli attacchi di spoofing. Gli algoritmi di navigazione devono rilevare le anomalie, rifiutare gli input danneggiati e mantenere un funzionamento sicuro in condizioni degradate. Con l’aumentare dei livelli di autonomia, la navigazione senza GNSS diventa una capacità fondamentale a supporto di un processo decisionale affidabile e dell’esecuzione delle missioni.
Le tecnologie di navigazione e posizionamento senza GNSS continuano ad evolversi man mano che i sistemi senza pilota si espandono in ambienti più complessi e contesi. I progressi negli algoritmi di fusione dei sensori, nell’elaborazione a bordo e nelle modalità di navigazione alternative stanno consentendo una navigazione resiliente senza dipendere dai segnali satellitari nei domini aereo, terrestre, marittimo e sotterraneo.