



In this article, SatLab Geosolutions discusses the advantages its HydroBoat 990 Android-powered USV offers, including the ability to use just one controller to complete all the setup and bathymetric survey procedures.
When we talk about USVs for bathymetric tasks, we have to take into account not only the size and weight of these vessels but also the automatic navigation capabilities they offer. This greatly improves surveyors’ operational efficiency.
We must also factor in the various components associated with a USV: sensors, communication protocols between the USV and shore-based systems, and software features.
The portability and ease of learning this technical system are imperative; lowering the learning curve is a key priority before adding further features to suit different contexts.
The HydroBoat 990—an Android-powered USV system for bathymetric surveys—has been designed with efficiency in mind, from initial set-up to data collection stages. Every aspect has been optimized to provide users with an all-around reliable system, both in terms of accuracy and boat quality.


Clear Workflow
The preparation for the survey becomes simpler with an integrated echo sounder and GNSS receiver, as there are only a battery, sim card, and three communication antennas that need to be put in. To start the boat, merely press the power button, and the boat will connect with the controller automatically. Upon placing the boat on the water, all the future operations of the depth measurement task are done by the Android software SLHydro USV.
This user interface has a clear-cut design with two modules – survey interface and project settings; IP, port, and baud rate information no longer need to be done by hand. When in the main interface, click “Device Connection” at the bottom to see the current connection status on the screen. After creating a folder and setting up coordinates for your project settings, you can select “Survey” for Mission planning and Data collection.
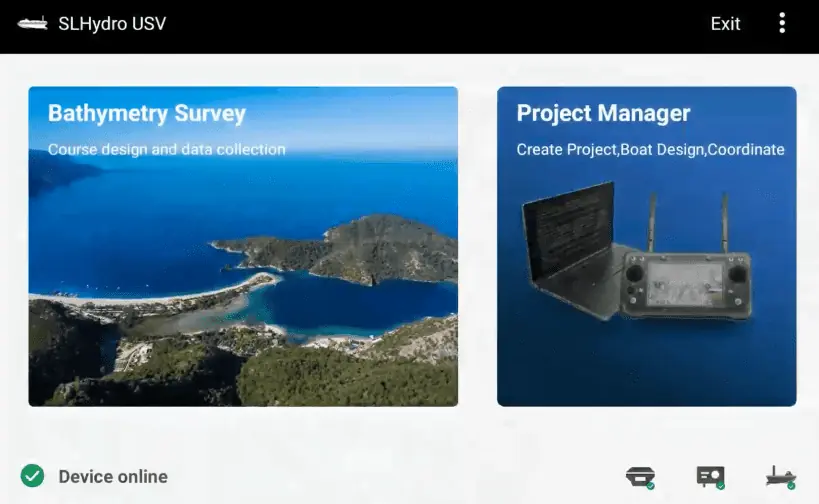
SLHydro USV
When we enter the surveying interface, Google Maps will be loaded automatically. And mission can be also automatically generated once we select waypoints on the Maps. The spacing and steering of the mission can be adjusted instantly until the course is at the right angle to the shore.
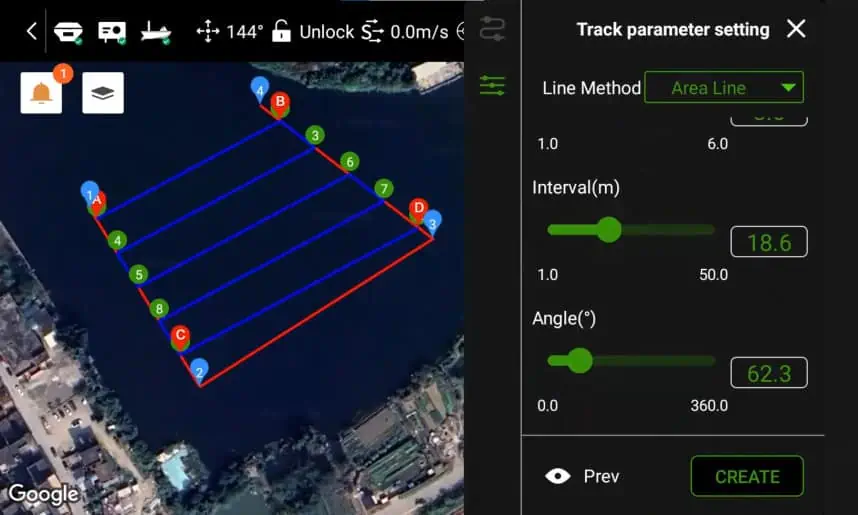
Mission planning
The red echo data is shown constantly on screen, allowing us to assess its quality without difficulty. In many water bodies, we can trigger the auto mode of the data tracking and no longer have to manually adjust power, gain, and threshold.
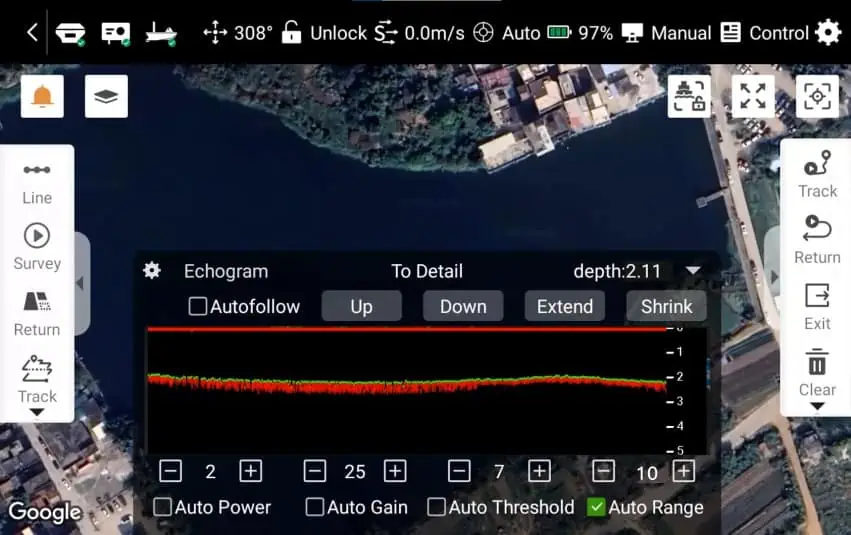
Echogram
After the fieldwork is completed, we need to process the data. Our free data processing software, SLHydro Sounder, allows users to review, process, and sample the data.
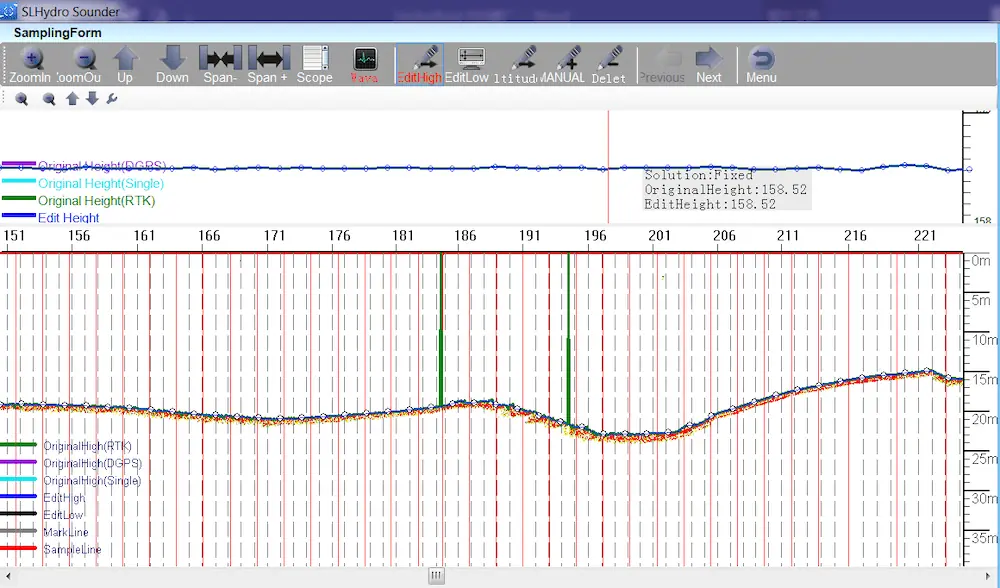
Data Process
Functionality
INS Module Integrated.
When the USV passes under bridges and the GNSS signals are blocked, the INS (Inertial Navigation System) tracks the position and orientation of the USV and provides position information to the boat.
Obstacle Avoidance.
At the front of the vessel lies a Millimeter Wave Radar unit with its frequency range set between 10GHz and 200GHz. This type of radar offers a narrow beam and high angular resolution, providing higher capability in measuring distance as well as identifying objects, compared to Ultrasonic Radar. When this function is activated in software, USV can detect obstacles within a 5-30 meter range at 90 degrees in the horizontal direction and 14 degrees in the vertical direction, thus ensuring the safety of the hull.
Remote Control Redundancy.
In most cases, we can reach a working distance of two kilometers using the wifi bridge connection. Two kilometers is almost the maximum range of vision, so this distance is sufficient for surveying. If we need a longer working distance, we can use 4G mode. When in 4G mode, the boat can be controlled from a distance of almost unlimited kilometers. However, it requires a better local network environment to do so.
Data Logging Redundancy.
We can log data in real-time on the software, so a copy of the data will be both saved and logged in the controller and in the HydroBoat 990’s storage, the control box which we mentioned earlier. Even when things go wrong unexpectedly, we know our efforts will not go to waste.
Stable Power Engine.
A propeller can be a fragile part, and it is often entangled with fishing lines or plastic trash in the water, reducing its service life. To deal with this situation, we added a grass-proof net to prevent some water plants from entering, and when the propeller is entangled with stubborn lines, we can easily disassemble the end of the propeller to clean the fan blade, or repair and replace the whole propeller.
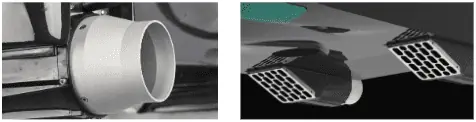
Propeller
Robust Hull.
In addition to adding bumper strips to the boat and strengthening its bottom, we performed over 20 full-speed impact tests on the hull from different angles to ensure a safe sail. Therefore, the double hull design will always prevent the boat from sinking even in extreme situations.
Such technological innovations and advancements have improved surveyors’ productivity levels while diminishing overall surveying costs. The HydroBoat 990 USV system has proved to be a convenient, reliable, and cost-effective solution for bathymetric surveys that meet current industry demands.


















