Dynautics, a leading provider of intelligent technology to control uncrewed marine missions worldwide, has successfully navigated thousands of miles using its advanced vehicle management technologies. The company designs, manufactures, and supplies robust marine autopilots, remote control systems, power management modules, and unmanned surface vehicle (USV) communication solutions.
In this exclusive Q&A, Dr Henry Robinson, CEO of Dynautics, shares insights on the evolution of the company’s marine autopilot and vehicle management systems, its approach to tailoring solutions for unmanned vessels, and how emerging trends in autonomy and AI will shape the future of marine operations.
Dynautics delivers robust marine autopilots and vehicle management technologies. Can you discuss how these technologies have evolved over the years and the key innovations that have shaped them?
From the outset, Dynautics has based its technology on some core principles: an understanding of the physics of vehicle control; simulations based on the physics; and a control architecture that is based on generic modules for maximum versatility.
We have then added some application-specific modules to handle particular cases, for example the interactions between RPM, gearbox, reversing bucket and steering nozzle control for waterjets. Some of that behaviour has been devolved into separate control modules, controlled over a bus architecture. The result is a system that is scalable across a wide range of uncrewed vessels and autonomous underwater vehicles (AUVs).
Dynautics is known for providing tailored solutions for various unmanned marine missions. Can you share some real-world use cases where your custom technologies have significantly improved the success of a mission, and how your team adapts to meet the specific requirements of different industries?
Wave powered craft, such as the USVs produced by AutoNaut, can keep going for many weeks, thousands of miles from land, because they need no battery or fuel for propulsion. Speeds may be slow, but AutoNaut’s USVs can cover great distances over long periods, making them an ideal choice where long-term persistence is important. AutoNaut’s requirement was for a low power control system with satellite connectivity, with minimum size: the vessel is small, so a VSAT antenna was out of the question.

Dynautics SPECTRE Marine Autopilot
So, this vessel had to use a small antenna, with very limited bandwidth; and some challenges in managing the datalink. We also had to provide power management, supplying power to systems with built-in remote switching and protection facilities. The result was a system that has been able to function at sea for weeks on end, covering thousands of miles, a long way beyond the horizon.
HydroSurv offers a range of electric and hybrid USVs from 2.8 to 6 metres for inland, nearshore and offshore survey operations and is another example of where Dynautics has optimised control for small electric and hybrid vehicles. Battery management was a particular challenge in this instance, as we had to be able to adjust the timings of battery charging to match the requirement for low noise (generator off) during certain phases of the mission.
Some of our industrial and defence customers required dual redundant systems, so we designed a vessel control system which can switch subsystem control buses between two autopilots with high reliability.
At the same time, these clients brought particular challenges of their own in terms of manoeuvrability: for example, one 12 metre vessel previously had a minimum turning circle of about 150 metres. After we installed our control system, the vessel could turn within its own length. Another vessel was required to follow curved paths, instead of the straight line traditionally used in planning.
With the rise of autonomous marine vessels, how do you see Dynautics’ role in advancing marine autonomy standards, especially in relation to your co-authorship of the Marine Autonomous Surface Ships – UK Code of Practice?
The UK’s Marine Autonomous Systems Regulatory Working Group (MASRWG) has been meeting for well over 10 years and has done some excellent work in bringing together key people in the field and providing leadership in the development of guidelines for building and operating USVs. We’ve had a position in that group since 2014 and it’s been very helpful to understand where the industry is headed and to have a say in the development of the Code.
The Phantom UUV is a highly customisable platform for autonomous subsea operations. Can you share any recent advancements in the UUV that improve its performance in harsh underwater environments?
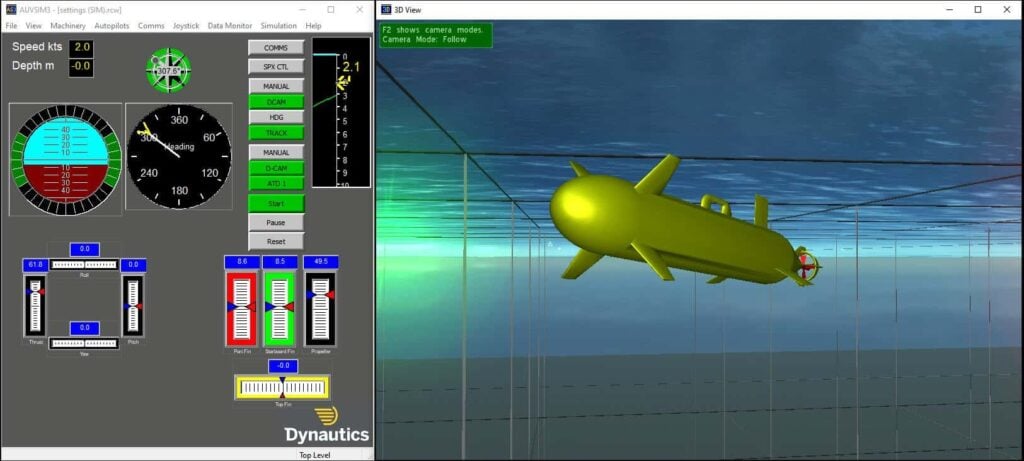
The first Phantom was conceived and taken through to first sea trials in 100 days. That was made possible because we started with a good understanding of vehicle dynamics, with our dynamic simulation software AUV Sim to help us rehearse trials and to see what would work best in terms of the physical design as well as the control algorithms. The versatility of MicroSPECTRE gave us an autopilot that was more or less ready to go, with very little modification.
Dynautics Phantom UUV
We’ve built on that success with Phantom 2 now, which is about double the size in each dimension – and about 8 times the mass and displacement.
The Phantom 2 went into its first manoeuvring trials in March 2025 and performed superbly. It’s based on the same very modular design, with propulsion and control in the aft section, so that the mid and front sections can very easily be adapted to carry new payloads, within its 315 millimetre diameter.
As Dynautics continues to push the boundaries of marine autonomy, what are some of the upcoming trends or technologies that you believe will shape the future of unmanned maritime systems?
I believe that true autonomy for UUV and AUVs is still some way off. Pseudo autonomous decision making, based on the customer’s mission parameters, can be pre-programmed and our vessel control system can respond to those parameters. The parameters can be remotely adjusted, fine-tuned, and, in some cases, ‘learnt’ to build a knowledge base to make the overall system more intelligent.
In my opinion, the development and increased use of AI algorithms within customers’ mission control systems will accelerate the move toward true autonomy. An example demonstrating this can be found in the scenario where survey data is being harvested by a UUV and the data suggests an interesting cartographic profile worthy of further investigation.
Under normal mission control, the UUV would continue to navigate in a predetermined manner. However, an autonomous mission control system would instruct the UUV to deviate from its preplanned route and create its own search pattern to better understand the area of interest. This provides better data in a more efficient way and creates more value for both the operator and the end user of that data.

The use of Radar, AIS, forward looking sonar and optical means all help with the detection of obstacles and significant advancements have been made over the last few years. There are still some real challenges in reaching high reliability under all conditions – night and day, rain and fog, high sea states; even the simple matter of keeping optical elements clear is not trivial.
Then, in a busy harbour or its approaches, there are complex traffic patterns, as well as tides to consider. COLREGs stipulate how vessels should behave, but not every vessel will always adhere to them, so there are elements of uncertainty. It’s a very complex picture and the bar is very high: a successful system will have to navigate safely and totally reliably.
Even a single failure could have grave consequences. For that reason, I believe that USVs will require human oversight for many years to come. In the interim, solutions will rely on supervised autonomy with augmented situational awareness for remote supervisors.
More generally, focus on the blue economy is a key driver for USV and UUV designers and users. The use of hybrid and electric propulsion systems is increasing, and this trend will continue. We need to be able to control a wide range of drive types and power sources, including purely electric drives. Dynautics has been doing just this for several years now. Our control systems are ready for the increased levels of autonomy that will be needed for better stewardship of our ocean going forward.
Thank you for the insights into your marine autopilots and vehicle management technologies. It has been great speaking with Dynautics, and we look forward to following the continued advancements and adoption of marine autonomy technologies in the unmanned maritime systems industry.