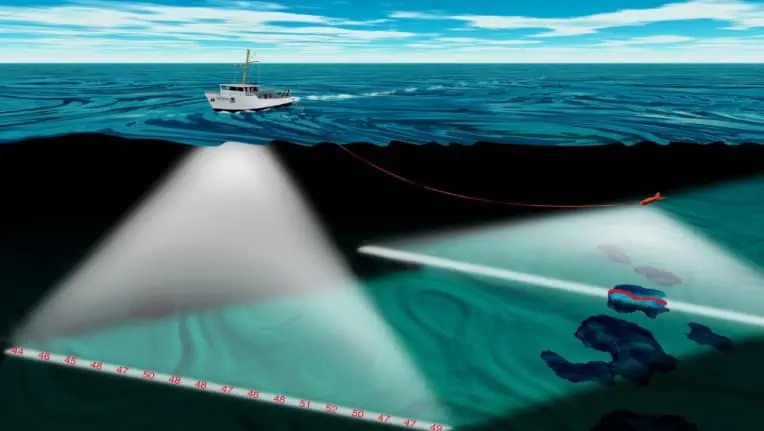
FarSounder has released a paper, authored by software engineer Heath Henley and Vice President of Engineering Matthew Zimmerman, exploring the use of 3-dimensional forward-looking sonar (3D FLS) for bathymetric data collection. 3D FLS is also used by both manned vessels and USVs (uncrewed surface vessels) for real-time navigation and hazard detection.
Download the full paper from FarSounder’s website here
The paper covers:
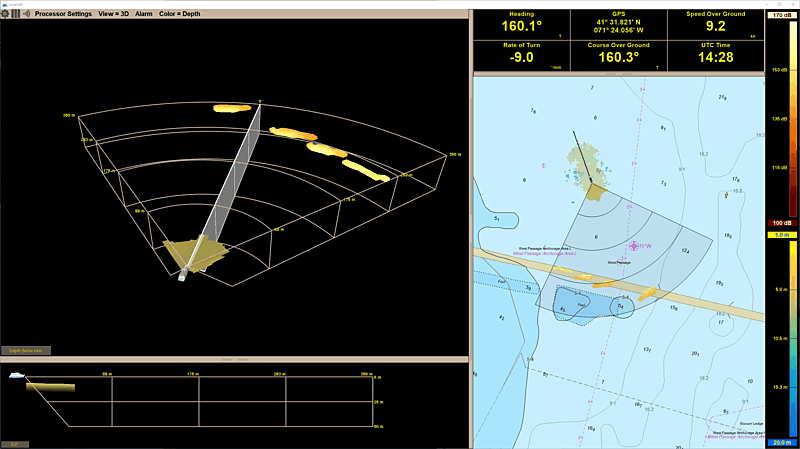
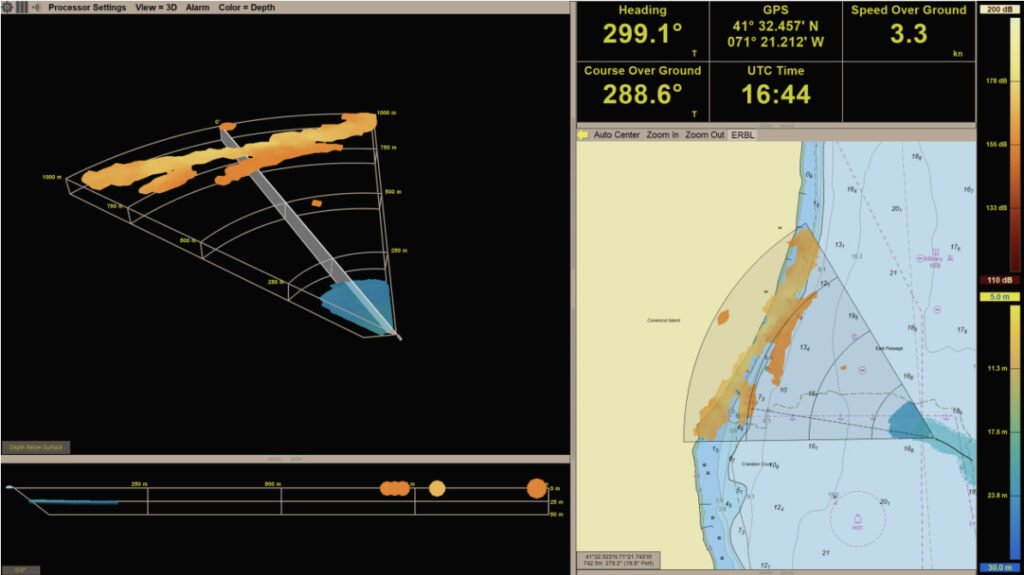
- FarSounder’s innovative forward looking multibeam (FLMB) processing technique that allows the bottom to be detected from 3D FLS data
- Differences in the use of MBES (multi-beam echo-sounders) and 3D FLS for bathymetry
- The results of two bathymetric surveys performed in the Narragansett Bay, including comparisons with NOAA reference data
The authors of the paper believe that with improvements in the processing and collection of data, 3D FLS systems will be capable of providing bathymetric survey data that satisfies International Hydrographic Organization (IHO) accuracy standards. To find out more, download the full paper from FarSounder’s website.