Detección de obstáculos y prevención de colisiones para vehículos no tripulados
La prevención de colisiones es una capacidad fundamental para los sistemas no tripulados modernos, ya que permite que vehículos como drones, robots terrestres y embarcaciones autónomas operen de forma segura en entornos complejos e impredecibles. Estos sistemas detectan y previenen posibles colisiones mediante una serie de sensores y algoritmos, lo que constituye una capa crítica en la autonomía robótica.
Si diseñas, construyes o suministras Prevención de colisiones y obstáculos, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
Detección de obstáculos y prevención de colisiones para vehículos no tripulados
Resumen por
Sarah Simpson
Actualizado:
La prevención de colisiones se refiere a la capacidad de un sistema autónomo o operado a distancia para percibir obstáculos en su entorno y modificar su trayectoria para evitarlos. Es un concepto más amplio que la detección de obstáculos, que se centra en identificar posibles peligros, ya que también incluye la toma de decisiones y la ejecución de maniobras para evitar colisiones.
En los vehículos no tripulados, incluidos los UAV (vehículos aéreos no tripulados), los UGV (vehículos terrestres no tripulados), los USV (vehículos de superficie no tripulados) y otras plataformas robóticas, la prevención de colisiones es esencial para permitir la navegación autónoma, garantizar el éxito de la misión y proteger tanto los activos como a las personas.
Estos sistemas son fundamentales en las operaciones más allá del alcance visual (BVLOS), en las que los pilotos remotos no pueden ver directamente el vehículo y deben confiar en los sistemas a bordo para navegar de forma segura y eficaz. Ya sea para topografía aérea, logística autónoma o reconocimiento del campo de batalla, la prevención de colisiones es un requisito innegociable en la tecnología no tripulada.
Funciones clave: detección, evaluación y maniobrabilidad
Sistema anticolisión para UAS BVLOS, Casia, de uAvionix.
La prevención de colisiones suele implicar tres procesos básicos:
Detección de obstáculos: Sensores como LiDAR, radar, sensores ultrasónicos y sistemas basados en la visión escanean el entorno para identificar objetos o terrenos cercanos.
Evaluación de riesgos: El ordenador de a bordo utiliza algoritmos de visión artificial o lógica basada en reglas para evaluar la probabilidad de una colisión en función de la proximidad y la trayectoria del objeto.
Maniobras de evitación: Una vez detectada una amenaza, el sistema ejecuta un cambio de trayectoria o un ajuste de velocidad en tiempo real para alejar el vehículo del obstáculo.
Estos procesos se gestionan mediante un software de a bordo cada vez más sofisticado que permite una toma de decisiones dinámica, incluso en entornos abarrotados o sin cobertura GPS.
Tipos de sistemas de prevención de colisiones
El diseño de un sistema de prevención de colisiones varía en función de la plataforma, el caso de uso y el contexto ambiental. Sin embargo, la mayoría de los sistemas se clasifican en varias categorías generales según cómo detectan e interpretan su entorno:
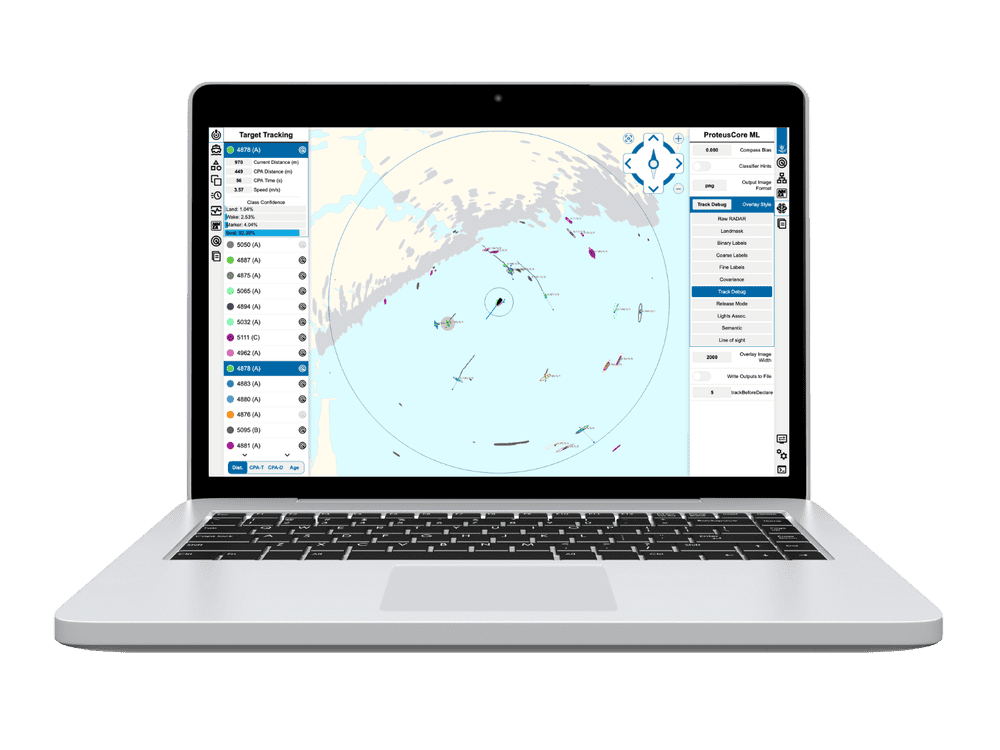
Solución para evitar colisiones de Sense Aeronautics.
Sistemas basados en sensores
Los diseños basados en sensores son la columna vertebral de la mayoría de las configuraciones de evitación de obstáculos. Pueden incluir:
LiDAR: ofrece un mapeo ambiental 3D de alta resolución y destaca en escenarios al aire libre y de largo alcance. Se utiliza habitualmente en vehículos aéreos no tripulados (UAV) y vehículos terrestres autónomos.
Radar: resistente a la niebla, la lluvia y el polvo, lo que lo hace adecuado tanto para plataformas aéreas como terrestres.
Sensores ultrasónicos: rentables y fiables para la detección a corta distancia, suelen encontrarse en UGV de interior o drones que operan a baja altitud.
Sensores infrarrojos: útiles en entornos con poca luz o contraste térmico, suelen encontrarse en aplicaciones de defensa o nocturnas.
Sensores basados en la visión (cámaras): utilizan cámaras monoculares, estéreo o RGB-D para generar mapas de profundidad e imágenes del entorno para la identificación de obstáculos.
Sistemas de visión artificial
Los sistemas avanzados de prevención de colisiones utilizan la visión artificial con IA para interpretar los datos de la cámara, lo que les permite clasificar y predecir el movimiento de los obstáculos. Estos algoritmos permiten a los drones «comprender» las escenas, distinguiendo entre objetos estáticos y dinámicos, como peatones o vehículos.
La navegación basada en la visión también es compatible con SLAM (localización y mapeo simultáneos), fundamental para navegar por entornos desconocidos. Estos sistemas son especialmente útiles en UAV que vuelan en zonas sin cobertura GPS, cañones urbanos o interiores.
Sistemas de fusión de sensores
Para mejorar la robustez, muchos sistemas modernos integran múltiples sensores, combinando datos LiDAR con imágenes de cámara o entradas de radar. Este enfoque de fusión de sensores mejora la fiabilidad y la precisión, especialmente en escenarios críticos o impredecibles. Por ejemplo, un dron puede utilizar LiDAR para el mapeo estructural y el radar para mantener la conciencia de los obstáculos en condiciones meteorológicas adversas.
Componentes de un sistema de prevención de colisiones
El diseño de un sistema fiable de prevención de colisiones implica una compleja integración de elementos de hardware y software. Estos componentes funcionan conjuntamente para garantizar que los sistemas no tripulados puedan navegar con seguridad por entornos dinámicos e impredecibles.
Sensores
Son los «ojos y oídos» del vehículo, que recopilan datos ambientales sin procesar mediante la detección de proximidad, la imagen térmica o la detección óptica:
A menudo se incorporan mecanismos de redundancia y a prueba de fallos en aplicaciones críticas para garantizar el funcionamiento continuo en caso de fallo de un componente, lo que mejora la fiabilidad del sistema de prevención de colisiones en situaciones críticas.
Prevención de colisiones en diversas plataformas no tripuladas
Aunque los principios básicos siguen siendo los mismos, la implementación de la prevención de colisiones varía significativamente entre los distintos tipos de plataformas:
Sistemas aéreos (UAV)
Los drones y los UAV utilizan una combinación de sistemas de visión, LiDAR y radar para evitar colisiones en el aire, lo que es especialmente importante en operaciones más allá del alcance visual (BVLOS) en las que se utilizan drones y se deben evitar obstáculos. Los drones que evitan obstáculos son cruciales para la entrega de paquetes, la inspección de infraestructuras y la fumigación agrícola, ya que suelen operar cerca de personas o estructuras.
Sistemas terrestres (UGV)
Los UGV utilizan sensores de proximidad y cartografía en tiempo real para navegar por almacenes, fábricas o terrenos irregulares. Deben lidiar con objetos estáticos, como palés, así como con obstáculos dinámicos, como trabajadores o vehículos. Los sistemas de navegación seguros para los UGV dan prioridad a la detección de obstáculos con baja latencia y a la planificación fluida de rutas para garantizar una navegación segura.
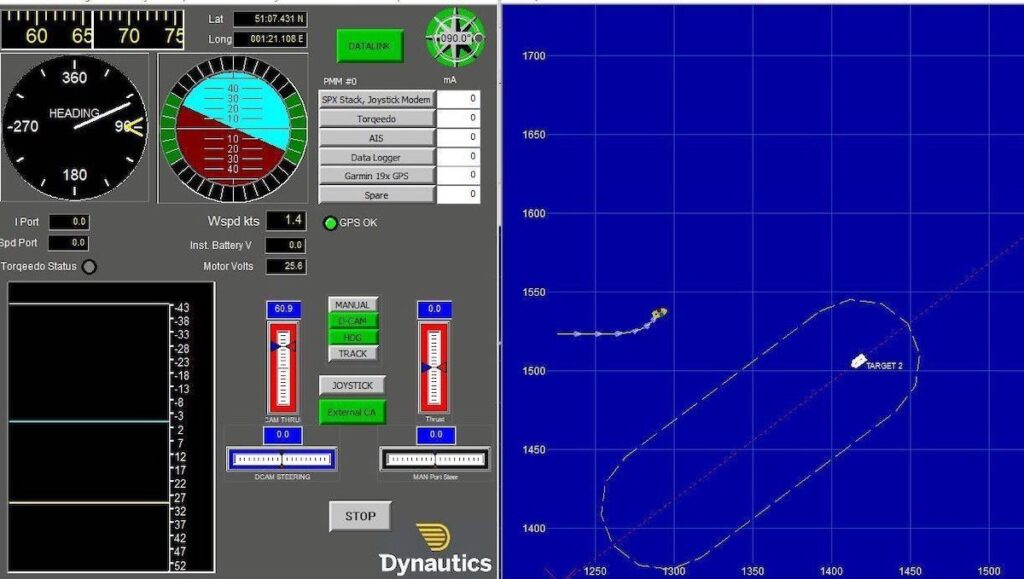
Sistemas de superficie y marítimos (USV/UUV)
Las embarcaciones autónomas acuáticas suelen depender de radares, sonares y algoritmos basados en COLREG para navegar con seguridad por las vías navegables. Estos sistemas evalúan el comportamiento de otras embarcaciones, siguiendo las normas internacionales para evitar colisiones y evitando boyas, muelles y fauna silvestre.
Aplicaciones de la tecnología de prevención de colisiones
Uso comercial
Las empresas minoristas, logísticas y de comercio electrónico utilizan UAV y UGV con sistemas de detección de obstáculos para automatizar la entrega y la logística interna. Los drones con prevención de colisiones reducen el riesgo en entornos urbanos, lo que permite la entrega en la última milla sin poner en peligro a los peatones ni a la propiedad.
Uso industrial
En almacenes y fábricas, los sistemas de prevención de colisiones de los robots móviles autónomos (AMR) ayudan a optimizar la manipulación de materiales y el movimiento de inventario. En las obras de construcción, los robustos UGV con evitación de obstáculos LiDAR maniobran con seguridad a través de paisajes en constante cambio.
Uso militar
En defensa, la prevención de colisiones desempeña un papel fundamental tanto en plataformas autónomas como semiautónomas. Desde drones ISR (inteligencia, vigilancia y reconocimiento) hasta vehículos terrestres no tripulados, estos sistemas permiten a las unidades operar de forma independiente en entornos conflictivos o sin cobertura GPS. Los sistemas de navegación basada en la visión y DAA ayudan a mantener la integridad de la misión incluso en condiciones de guerra electrónica.
Relación con los sistemas de detección y evitación
Aunque están estrechamente relacionados, los sistemas de detección y evitación (DAA) están diseñados específicamente para cumplir los requisitos normativos y operativos de las aeronaves no tripuladas que vuelan en espacios aéreos compartidos, especialmente durante operaciones BVLOS. Los sistemas DAA incorporan una detección de mayor alcance y, a menudo, incluyen la coordinación con otros sistemas de gestión del tráfico aéreo.
Por el contrario, los sistemas de prevención de colisiones están diseñados para la evasión de obstáculos a corta y media distancia y se utilizan en todos los ámbitos no tripulados.
Evolución de la prevención de colisiones
La prevención de colisiones permite a los drones, robots y embarcaciones autónomas operar con mayor seguridad, precisión e independencia. Mediante la integración de una amplia gama de sensores, desde LiDAR y radar hasta sistemas de visión, y combinándolos con software avanzado e inteligencia artificial, las plataformas no tripuladas actuales pueden detectar y sortear obstáculos de forma fiable.
A medida que los sistemas no tripulados sigan evolucionando, también lo hará la sofisticación de sus sistemas de mitigación de colisiones, avanzando hacia la autonomía total en entornos dinámicos. Ya sea para apoyar la entrega autónoma con drones, la logística de almacenes o la vigilancia de defensa, la prevención de colisiones seguirá siendo fundamental para el crecimiento y la seguridad de las operaciones no tripuladas.