Cambridge Pixel, a leading developer of radar software, sensor processing, and display solutions for USVs (unmanned surface vessels), has partnered with Unmanned Systems Technology (“UST”) to demonstrate their expertise in this field. The ‘Silver’ profile highlights how their solutions can be interfaced with a wide variety of maritime radars, as well as other sensors, including cameras, AIS, GPS/GNSS, and motion reference units (MRUs), to support military and commercial unmanned maritime platforms.
![]()
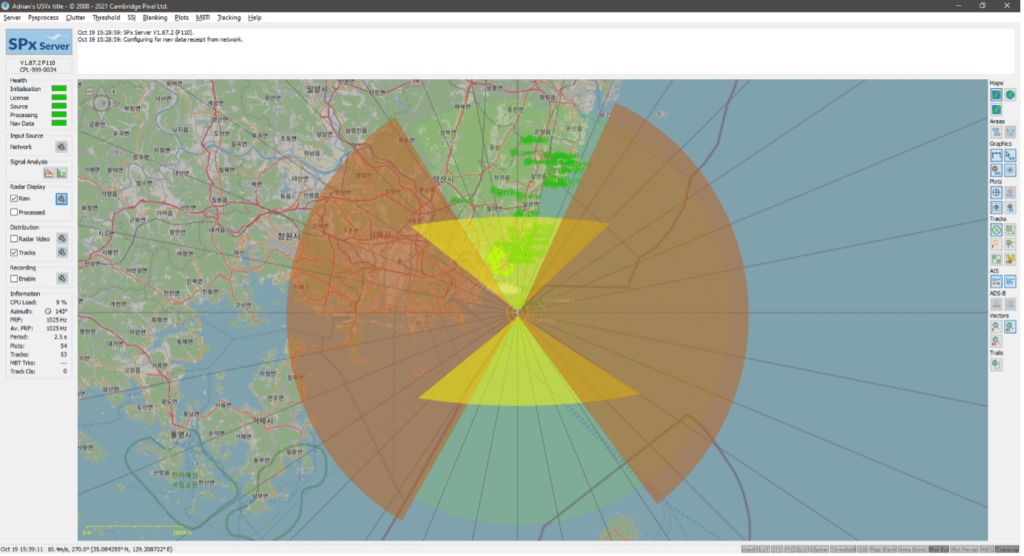
The system software includes the SPx Processing library, which provides a comprehensive range of radar processing capabilities. User-defined processes may be incorporated into the processing workflow, allowing for custom solutions that use SPx as the integrating framework. A variety of parameters can be configured to fine-tune the performance of the tracker.

The radar software correlates the input source reports and generates a single set of output reports without duplicates. It can handle sensors that have an overlapping coverage region(s), e.g. an S-band and X-band radar, providing handover support as targets move from one sensor to the next.
 The HPx-346 is a small form factor interface and distribution unit that digitises analogue data from radars and distributes it as UDP packets over Ethernet. Available as an enclosed unit or as an OEM card for system integrators, the unit features a low-power ARM/FPGA-based System on Chip (SoC) that boots up in less than ten seconds and consumes less than 5W of peak power.
The HPx-346 is a small form factor interface and distribution unit that digitises analogue data from radars and distributes it as UDP packets over Ethernet. Available as an enclosed unit or as an OEM card for system integrators, the unit features a low-power ARM/FPGA-based System on Chip (SoC) that boots up in less than ten seconds and consumes less than 5W of peak power.
The unit accepts radar video, trigger and azimuth (ACP/ARP) signals as inputs, and can be configured to handle a wide range of signal types, including differential and single-ended with signals up to 60V, allowing it to interface with a wide range of different radar models.
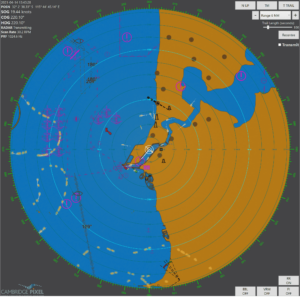 The Maritime Display Framework is a software development package that allows users to create custom Windows .NET-based user interfaces for the display of primary maritime radar data and secondary transponder information. The user interface can be customized to display scan-converted primary radar video, video track information, electronic charts, secondary transponder information, and camera video. Multiple camera windows with various input formats are supported, including H.264 via RTSP stream.
The Maritime Display Framework is a software development package that allows users to create custom Windows .NET-based user interfaces for the display of primary maritime radar data and secondary transponder information. The user interface can be customized to display scan-converted primary radar video, video track information, electronic charts, secondary transponder information, and camera video. Multiple camera windows with various input formats are supported, including H.264 via RTSP stream.
The software development package provides various tools for processing of information commonly required for maritime displays, such as generation of predictive vectors, calculation of a tracked object’s closest point of approach (CPA), and time to CPA (TCPA), providing warning of collision with other vessels. A comprehensive range of alarms can be built into displays, including target track alarm type and target dependence.
To find out more about Cambridge Pixel and their radar solutions for USVs, please visit their profile page: https://www.unmannedsystemstechnology.com/company/cambridge-pixel/