Sonardyne International Ltd. in partnership with The National Oceanography Centre (NOC) and L3Harris, have set new standards in endurance underwater navigation and automated subsea positioning.
The joint P3AUV project saw the subsea technology specialists collaborating during a £1.4 million, two-year project partly funded by Innovate UK.
The Precise Positioning for Persistent Autonomous Underwater Vehicles Project (P3AUV), set out to reduce risk, operating costs and environmental impact, through a greater use of unmanned surface vessels (USVs) during offshore survey positioning operations. The aim was to achieve this through the integration of existing and emerging technologies in unmanned endurance and navigational precision.
James Cowles of L3Harris UK explains; “An offshore support or research vessel will typically burn some 3,000 tonnes of fuel annually and generate about 10,000 tonnes (equivalent) of greenhouse gases. The environmental footprint of an independent ASV or AUV is, by comparison, negligible.”
As the only company producing an all-in-one hybrid acoustic-inertial-Doppler navigation and communication solutions for AUVs and USVs, Sonardyne were ideal collaborators on the P3AUV project.
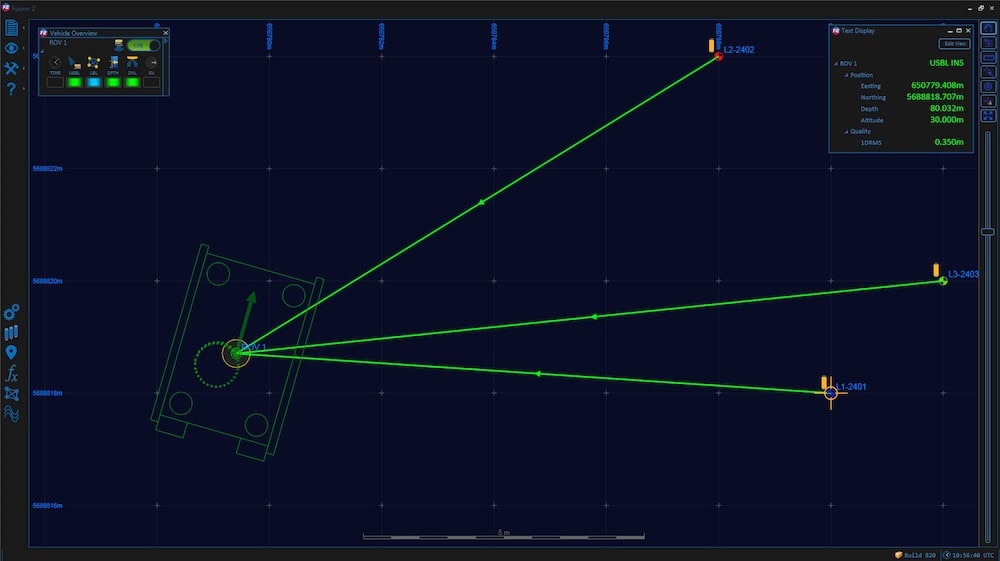
Speaking as to the importance of being able to send AUVs and UUVs on long endurance missions, Sonardyne’s Global Business Manager for Ocean Science Geraint West said; “Current constraints on AUV or UUV operations, such as onboard battery capacity and navigational accuracy degradation over time, has meant that the role these vehicles have had to play has been largely restricted to relatively short deployments. By developing and integrating each organisation’s technologies, including our own SPRINT-Nav navigation instrument, we’ve proven it’s possible for underwater platforms to make more of their available onboard power and maintain navigational accuracy over long distances without external aiding. We’ve also proven the capability to autonomously calibrate networks of seafloor positioning transponders with an L3Harris C-Worker 5 USV to make offshore survey and construction operations faster and easier”.
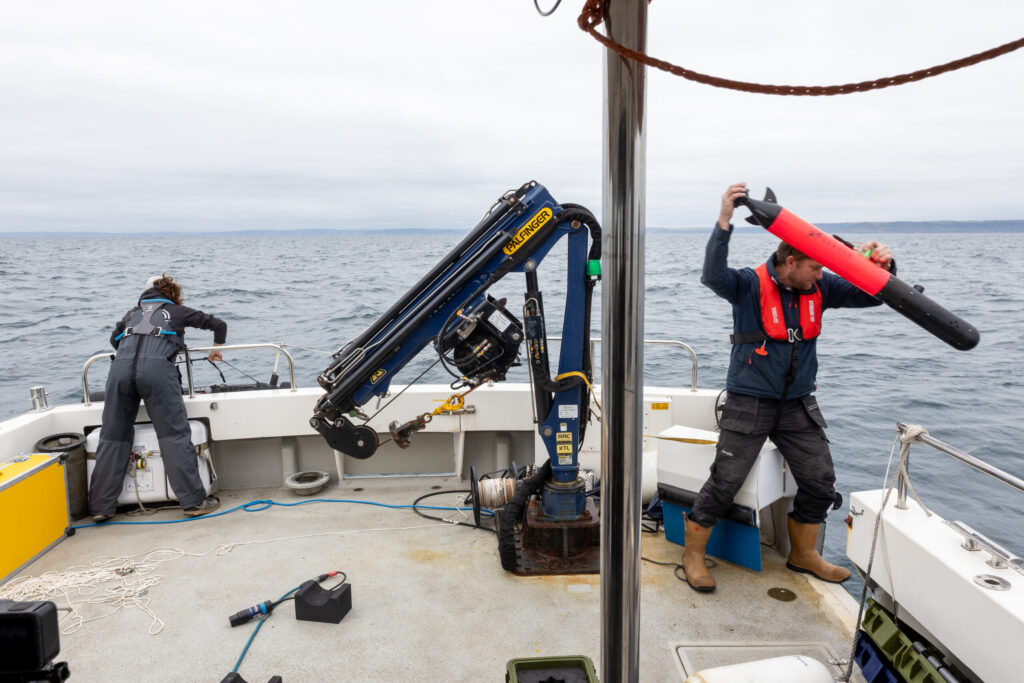
The final trials, which were completed in December in Loch Ness, Scotland, saw one of the NOC’s largest deployment of AUVs operating in swarms. It is thought that the success of the P3AUV project could be a game changer in the marine autonomy space, impacting on a wide range of AUV applications.
Speaking as to the impact of the project, Matt Kingsland from NOC said; “Combining all of these capabilities will bring about a step-change in AUV operations, providing a disruptive capability in the marine autonomy space. Indeed, reducing the cost and improving the navigation precision of autonomous ocean science in remote areas could bring a disruptive capability to a wide variety of applications.”
The success of the P3AUV project has long been a shared vision within the ocean science, offshore energy and defence sectors, were being able to send autonomous and unmanned underwater vehicles (AUV/UUVs) out on missions for weeks or even months can have a significant impact on risk, cost and efficiency.