Sonardyne International has announced that joint trials conducted with Norwegian research institute SINTEF Ocean have proven the ability for an acoustic positioning system to track underwater robots as they move through industrial-scale fish pens.
Being able to accurately track remotely operated vehicles (ROVs) in aquaculture operations, including cage and mooring inspection and removing perished fish, will help operators to increase efficiency and productivity and reduce the need for divers.
Until now, there has been a misperception that acoustic tracking systems do not work in fish farm applications, due to the volume and density of fish within the pens or cages. Fish have an air-filled swim bladder that helps them regulate their buoyancy and this organ can interfere with the transmission and reception of acoustic signals from the surface to an ROV. In a farm with up to 200,000 fish in any one cage, it has been thought that this could pose significant challenges for some acoustic based systems.
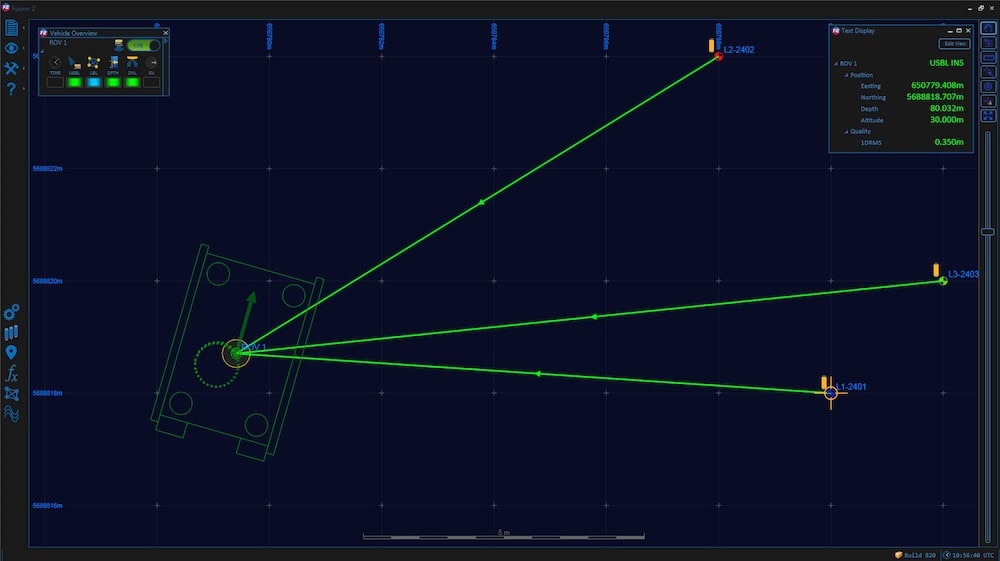
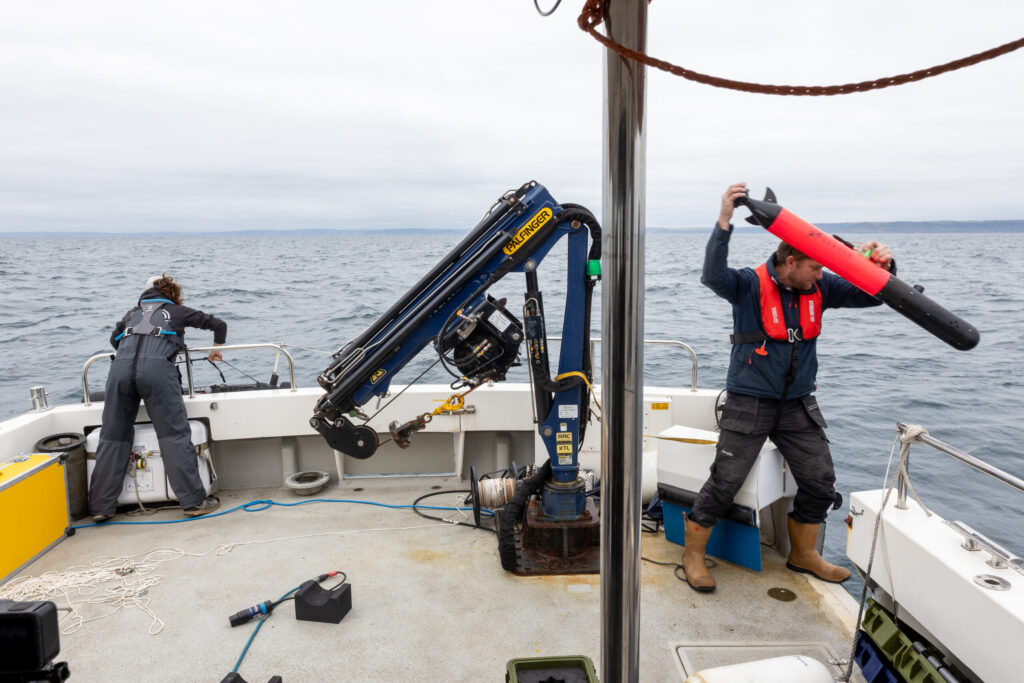
In the trials, at the Korsneset SINTEF ACE site near Trondheim, Norway, a Micro-Ranger 2 Ultra-Short BaseLine (USBL) positioning system was used to track an Argus Mini ROV through a pen containing an estimated 150,000-200,000 salmon. Micro-Ranger 2 is Sonardyne’s latest USBL positioning system, designed for users with no previous experience of USBL equipment. It features a small acoustic transceiver deployed from a vessel or pontoon and an acoustic transponder attached to the ROV. Micro-Ranger 2 uses Sonardyne’s Wideband 2 acoustic signals combined with highly sensitive receivers, which can detect the unique acoustic signals, even in challenging acoustic environments.
“The demonstration, with SINTEF, showed that our systems function to their usual high standards in low to medium fish densities, both inside and outside of the cage, with the ROV being tracked consistently and accurately. When tracking the ROV through the highest density of fish, the frequency of position updates did decrease, but, the positioning of the ROV was still accurate when acoustic paths were available. And, by moving the ROV away from the net, the frequency of updates could be improved,” said Elizabeth Paull, Business Development Manager at Sonardyne.
“These positive results mean that those in the aquaculture industry can now use Micro-Ranger 2 for ROV tracking, knowing that the system will track even with high densities of fish,” added Paull. “This means that items of interest, such as holes or tears in the net, can be located and then relocated quickly and easily, reducing the time needed to make repairs.”