Navegación y posicionamiento sin GNSS para sistemas no tripulados
Encuentre proveedores, fabricantes y desarrolladores de tecnología de navegación sin GNSS. Los sistemas de navegación y posicionamiento sin GNSS permiten que las plataformas no tripuladas funcionen de forma fiable cuando las señales de navegación por satélite no están disponibles, se degradan o se interrumpen intencionadamente. Estas tecnologías son fundamentales para garantizar el posicionamiento, la navegación y la sincronización en entornos conflictivos, congestionados y sin señales en los ámbitos aéreo, terrestre, superficial y submarino.
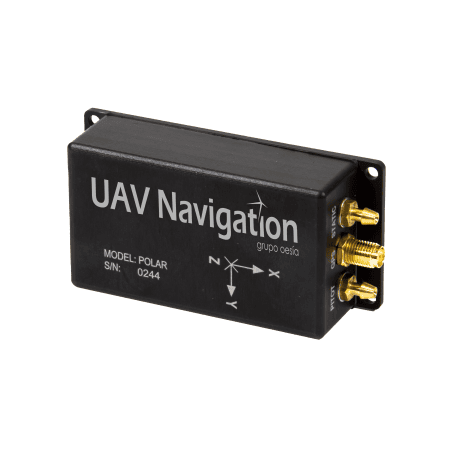
Sistema de posicionamiento en tiempo real de alta precisión para vehículos aéreos no tripulados autónomos y robótica que operan en entornos sin cobertura GPS.
Si diseñas, construyes o suministras Navegación y posicionamiento sin GPS/GNSS, Crea un perfil para mostrar tus capacidades y conectar con visitantes que tengan una necesidad real de tus soluciones.
Navegación y posicionamiento sin GNSS para sistemas no tripulados
Resumen por
Eleanor Widdows
Actualizado:
La tecnología de navegación y posicionamiento sin GNSS permite a los sistemas no tripulados determinar su posición, velocidad y orientación sin depender del GPS ni otras señales de navegación por satélite. Estas tecnologías son fundamentales, ya que cada vez es más necesario que las plataformas aéreas, terrestres, marítimas y submarinas no tripuladas operen en entornos en los que el GNSS no está disponible, se ve degradado o se ve deliberadamente interrumpido por interferencias o spoofing.
Mediante el uso de sensores a bordo, procesamiento y métodos de navegación alternativos, la navegación sin GNSS proporciona un posicionamiento resistente en cañones urbanos, espacios interiores y subterráneos, entornos marítimos y condiciones electromagnéticas conflictivas. Este enfoque favorece la autonomía segura, la continuidad de las misiones y la fiabilidad operativa cuando la navegación por satélite no está disponible o no es fiable.
Suite de navegación sin GPS de triple capa para UAV de Honeywell Aerospace.
Dónde se necesita la navegación sin GNSS
Defensa y operaciones en zonas de conflicto
La navegación sin GNSS permite un posicionamiento seguro para los sistemas no tripulados que operan bajo interferencias GPS, suplantación de identidad y ataques electrónicos. Los UAV militares y otras plataformas dependen de estas capacidades para mantener la continuidad de la navegación en espacios aéreos disputados y entornos electromagnéticos hostiles.
Autonomía en entornos urbanos y construidos
Los vehículos autónomos que operan en cañones urbanos se enfrentan al bloqueo de señales y a interferencias multitrayecto procedentes de los edificios. La navegación sin GNSS permite el funcionamiento seguro de las plataformas aéreas y terrestres cuando no se dispone de navegación satelital continua.
Operaciones de búsqueda y rescate
La navegación sin GNSS permite que los sistemas no tripulados operen en interiores, subterráneos o zonas afectadas por desastres donde la infraestructura está dañada o no está disponible. Estas capacidades permiten una navegación eficaz en estructuras derrumbadas, túneles y terrenos urbanos densos.
Operaciones marítimas y submarinas
Los entornos submarinos y cercanos a la costa carecen inherentemente de disponibilidad GNSS. Los vehículos submarinos autónomos y las plataformas de superficie dependen de métodos de navegación sin GNSS para mantener un posicionamiento preciso durante misiones de larga duración.
Autonomía comercial e industrial
Las aplicaciones industriales, como la robótica de almacenes, las operaciones mineras, las actividades marítimas y la inspección de infraestructuras, se benefician de la navegación sin GNSS. Estos entornos exigen un posicionamiento fiable independiente de señales externas para mejorar la seguridad y la eficiencia operativa.
Tipos de sistemas de navegación sin GNSS
Sistemas de navegación inercial
Los sistemas de navegación inercial proporcionan un posicionamiento autónomo mediante el cálculo del movimiento a partir de sensores inerciales a bordo. Estos sistemas funcionan independientemente de las señales externas, lo que los convierte en una capacidad fundamental para la navegación sin GNSS en plataformas no tripuladas aéreas, terrestres, marítimas y submarinas.
Unidades de medición inercial
Las unidades de medición inercial combinan acelerómetros y giroscopios para medir la aceleración lineal y el movimiento rotacional. Las IMU son componentes fundamentales de la navegación sin GNSS, ya que proporcionan datos de alta velocidad para la navegación por estima, la estimación de la actitud y el seguimiento del movimiento.
Sistemas de navegación integrados GNSS/INS
Los sistemas GNSS/INS integran estrechamente la navegación inercial con la navegación por satélite cuando está disponible, lo que permite transiciones fluidas entre operaciones asistidas por GNSS y operaciones sin GNSS. En entornos conflictivos o degradados, el subsistema inercial mantiene la navegación continua mientras filtra y rechaza las entradas GNSS corruptas, lo que convierte al GNSS/INS en una arquitectura primaria para una navegación resistente y segura.
Sistema de navegación inercial FOG M5 GNSS-Denied INS de Exail.
Relojes atómicos a escala de chip
Los relojes atómicos a escala de chip proporcionan referencias de sincronización a bordo muy estables que reducen la deriva de la navegación inercial durante interrupciones prolongadas del GNSS. Cuando se integran con sistemas GNSS/INS e inerciales, estos relojes mejoran la precisión a largo plazo y la resistencia de la sincronización sin necesidad de sincronización externa.
Sistemas de navegación basados en la visión
Los sistemas de navegación basados en la visión utilizan cámaras ópticas y procesamiento a bordo para estimar el movimiento mediante el seguimiento de las características visuales del entorno. Estos sistemas son muy adecuados para operaciones sin GNSS en entornos urbanos, interiores y de baja altitud con suficiente estructura visual.
Sistemas de localización y cartografía simultáneas
Los sistemas de localización y cartografía simultáneas permiten a las plataformas no tripuladas crear mapas de entornos desconocidos mientras estiman su posición dentro de ellos. Los sistemas SLAM permiten la navegación autónoma en condiciones en las que no se dispone de GNSS y no se dispone de mapas previos ni referencias absolutas.
Sistemas de navegación Lidar
Los sistemas de navegación Lidar utilizan sensores láser activos para generar datos ambientales tridimensionales para la localización y el mapeo. Estos sistemas permiten una navegación de alta precisión en entornos sin GNSS, incluidas condiciones de poca luz o visibilidad reducida.
Sistemas de navegación por radar
Los sistemas de navegación por radar proporcionan una detección y localización robustas en entornos afectados por el clima, el polvo, el humo o la mala visibilidad. La navegación basada en radar se utiliza habitualmente en plataformas marítimas y aéreas que requieren capacidad de largo alcance, para todo tipo de condiciones meteorológicas y sin GNSS.
Sistemas de navegación magnética
Los sistemas de navegación magnética aprovechan las variaciones espaciales del campo magnético terrestre para permitir el posicionamiento sin GNSS. Cuando se combinan con mapas magnéticos, estos sistemas ofrecen navegación pasiva en entornos en los que otras modalidades de detección son limitadas.
Sistemas de navegación con referencia al terreno
Los sistemas de navegación con referencia al terreno estiman la posición correlacionando los datos de los sensores a bordo con mapas digitales del terreno o de elevación almacenados. Estos sistemas son eficaces para plataformas aéreas y terrestres de baja altitud que operan en regiones sin GNSS con un terreno bien caracterizado.
Sistemas de navegación celestial
Los sistemas de navegación celestial determinan la posición mediante la observación de las estrellas u otras referencias celestes. Estos sistemas son útiles para misiones de larga duración en las que no se dispone de señales GNSS, ya que no hay señales de navegación terrestre ni señales de satélite disponibles.
Sistemas de navegación multisensor
Los sistemas de navegación multisensor integran datos inerciales, GNSS/INS, visuales, lidar, radar, magnéticos y basados en el terreno. Al combinar modalidades de detección complementarias, estos sistemas mejoran la robustez y la continuidad en diversos entornos sin GNSS.
Software de fusión de sensores
El software de fusión de sensores combina los datos de múltiples sensores de navegación en una solución de navegación unificada. Estos algoritmos son esenciales para gestionar la incertidumbre, corregir la deriva y mantener un posicionamiento fiable durante las interrupciones o los ataques al GNSS.
Sistemas de navegación seguros y resistentes
Los sistemas de navegación seguros están diseñados para funcionar a pesar de las interferencias, el spoofing y la degradación de la señal del GNSS. Estos sistemas hacen hincapié en la supervisión de la integridad, la detección de fallos y el rendimiento resistente para apoyar las operaciones no tripuladas de misión crítica en entornos conflictivos.
Comparaciones y compensaciones
La selección de un enfoque de navegación sin GNSS implica compensaciones entre precisión, resistencia, coste, tamaño, peso y potencia. Los sistemas de navegación inercial son compactos y autónomos, pero susceptibles de errores acumulativos. La navegación basada en la visión ofrece una alta precisión relativa, pero depende de la visibilidad del entorno y de los recursos de procesamiento.
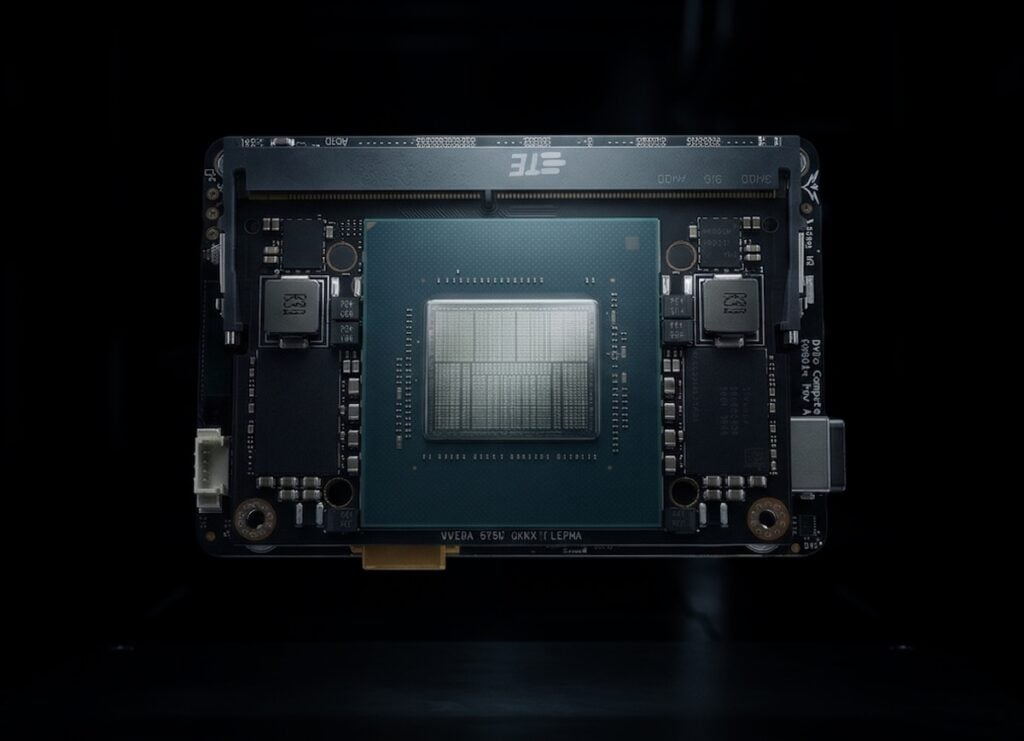
GPS-Denied GNSS INS de ANELLO Photonics.
Los sensores Lidar y radar proporcionan independencia del entorno, pero aumentan la complejidad del sistema y los requisitos de alimentación. La navegación magnética y la navegación referenciada al terreno dependen de la disponibilidad y la calidad de los mapas del entorno. Los sistemas multisensor ofrecen la mayor resiliencia, pero requieren algoritmos avanzados de integración y navegación.
El tipo de plataforma también influye en la selección del sistema. Los sistemas de navegación de los UAV dan prioridad a los sensores ligeros y a las velocidades de actualización rápidas, mientras que las plataformas terrestres y marítimas pueden acomodar cargas útiles de sensores más grandes. Los sistemas de navegación submarina hacen hincapié en la estabilidad a largo plazo y la baja deriva en ausencia de actualizaciones externas.
Normas y consideraciones pertinentes
Las tecnologías de navegación sin GNSS para sistemas no tripulados suelen ajustarse a las normas de defensa y aeroespaciales que regulan el rendimiento, la resiliencia y la seguridad de la navegación. Las normas pertinentes incluyen especificaciones militares que abordan el posicionamiento garantizado, la compatibilidad electromagnética y la resiliencia frente a interferencias y suplantaciones. La interoperabilidad y la modularidad son consideraciones esenciales para la integración en las arquitecturas de sistemas no tripulados existentes.
Las soluciones de navegación garantizadas hacen cada vez más hincapié en la ciberseguridad, la integridad de la señal y la robustez frente a los ataques de suplantación. Los algoritmos de navegación deben detectar anomalías, rechazar entradas corruptas y mantener un funcionamiento seguro en condiciones degradadas. A medida que aumentan los niveles de autonomía, la navegación sin GNSS se convierte en una capacidad fundamental que respalda la toma de decisiones y la ejecución de misiones fiables.
Las tecnologías de navegación y posicionamiento sin GNSS siguen evolucionando a medida que los sistemas no tripulados se expanden a entornos más complejos y disputados. Los avances en los algoritmos de fusión de sensores, la informática a bordo y las modalidades de navegación alternativas están permitiendo una navegación resistente sin depender de las señales de satélite en los dominios aéreo, terrestre, marítimo y subsuperficial.