Hinderniserkennung und Kollisionsvermeidung für unbemannte Fahrzeuge
Die Kollisionsvermeidung ist eine grundlegende Funktion moderner unbemannter Systeme, die es Fahrzeugen wie Drohnen, Bodenrobotern und autonomen Schiffen ermöglicht, in komplexen, unvorhersehbaren Umgebungen sicher zu operieren. Diese Systeme erkennen und verhindern potenzielle Kollisionen mithilfe einer Reihe von Sensoren und Algorithmen und bilden damit eine wichtige Ebene der Roboterautonomie.
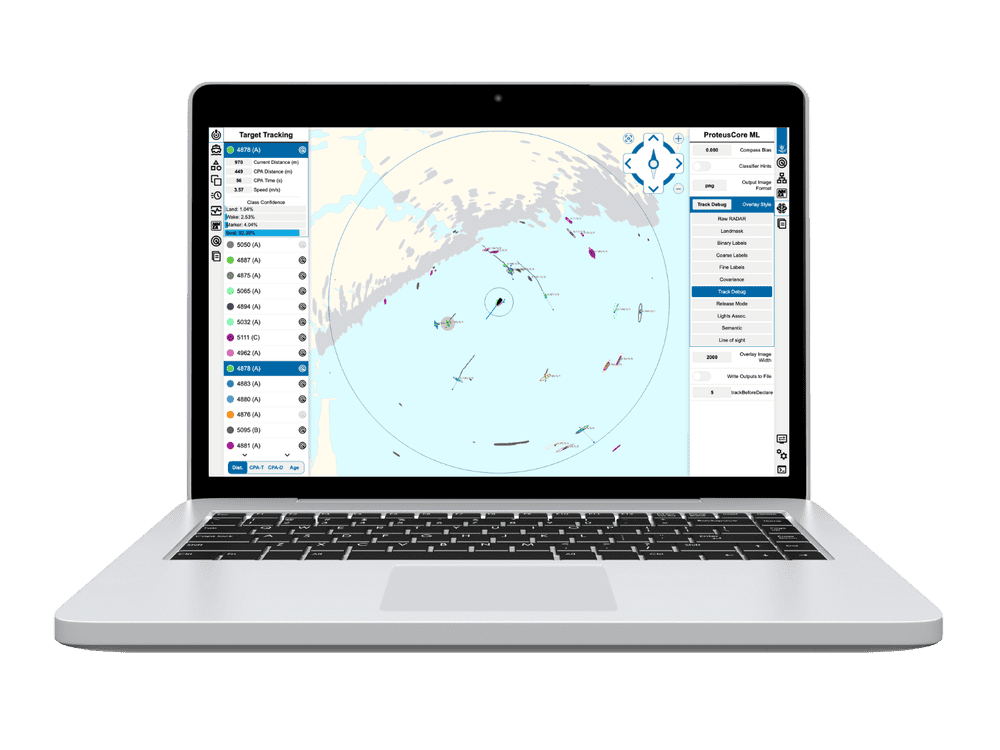
Intelligente Lösungen für die Verarbeitung von Schiffsradardaten: Fortschrittliche Wahrnehmung und Situationsbewusstsein für unbemannte und autonome Schiffe
Wenn Sie entwerfen, bauen oder liefern Kollisions- und Hindernisvermeidung, Erstellen Sie ein Profil, um Ihre Kompetenzen zu präsentieren und mit Besuchern in Kontakt zu treten, die einen konkreten Bedarf an Ihren Lösungen haben.
Hinderniserkennung und Kollisionsvermeidung für unbemannte Fahrzeuge
Übersicht von
Sarah Simpson
Aktualisiert:
Kollisionsvermeidung bezeichnet die Fähigkeit eines autonomen oder ferngesteuerten Systems, Hindernisse in seiner Umgebung zu erkennen und seine Flugbahn entsprechend anzupassen, um diese zu umgehen. Es handelt sich hierbei um ein umfassenderes Konzept als die Hinderniserkennung, die sich auf die Identifizierung potenzieller Gefahren konzentriert, da es auch die Entscheidungsfindung und die Ausführung von Manövern zur Vermeidung von Kollisionen umfasst.
In unbemannten Fahrzeugen, darunter UAVs (unbemannte Luftfahrzeuge), UGVs (unbemannte Bodenfahrzeuge), USVs (unbemannte Oberflächenfahrzeuge) und andere Roboterplattformen, ist die Kollisionsvermeidung unerlässlich, um eine autonome Navigation zu ermöglichen, den Erfolg von Missionen sicherzustellen und sowohl Vermögenswerte als auch Menschen zu schützen.
Diese Systeme sind von grundlegender Bedeutung für den Betrieb außerhalb der Sichtweite (Beyond Visual Line of Sight, BVLOS), bei dem Fernpiloten das Fahrzeug nicht direkt sehen können und sich auf Bordsysteme verlassen müssen, um sicher und effektiv zu navigieren. Ob für Luftvermessungen, autonome Logistik oder Kampfaufklärung – Kollisionsvermeidung ist eine unverzichtbare Anforderung in der unbemannten Technologie.
Schlüsselfunktionen: Erkennung, Bewertung und Manövrieren
Kollisionsvermeidung für BVLOS-UAS, Casia, von uAvionix.
Die Kollisionsvermeidung umfasst in der Regel drei Kernprozesse:
Hinderniserkennung: Sensoren wie LiDAR, Radar, Ultraschallsensoren und bildbasierte Systeme scannen die Umgebung, um Objekte oder Gelände in der Nähe zu identifizieren.
Risikobewertung: Der Bordcomputer verwendet Computervisionsalgorithmen oder regelbasierte Logik, um die Wahrscheinlichkeit einer Kollision anhand der Nähe und Flugbahn des Objekts zu bewerten.
Ausweichmanöver: Sobald eine Gefahr erkannt wird, führt das System eine Echtzeit-Kursänderung oder Geschwindigkeitsanpassung durch, um das Fahrzeug vom Hindernis wegzusteuern.
Diese Prozesse werden von einer immer ausgefeilteren Bordsoftware gesteuert, die eine dynamische Entscheidungsfindung auch in unübersichtlichen Umgebungen oder Umgebungen ohne GPS-Empfang ermöglicht.
Arten von Kollisionsvermeidungssystemen
Die Konstruktion eines Kollisionsvermeidungssystems variiert je nach Plattform, Anwendungsfall und Umgebungskontext. Die meisten Systeme lassen sich jedoch anhand der Art und Weise, wie sie ihre Umgebung erfassen und interpretieren, in mehrere große Kategorien einteilen:
Lösung zur Kollisionsvermeidung von Sense Aeronautics.
Sensorbasierte Systeme
Sensorgesteuerte Designs bilden das Rückgrat der meisten Systeme zur Hindernisvermeidung. Dazu können gehören:
LiDAR: Bietet hochauflösende 3D-Umgebungskartierung und eignet sich hervorragend für den Einsatz im Freien und über große Entfernungen. Wird häufig in UAVs und autonomen Bodenfahrzeugen eingesetzt.
Radar: Unempfindlich gegenüber Nebel, Regen und Staub, daher sowohl für luftgestützte als auch für terrestrische Plattformen geeignet.
Ultraschallsensoren: Kostengünstig und zuverlässig für die Kurzstreckenerkennung, typischerweise in Indoor-UGVs oder Drohnen zu finden, die in niedrigen Höhen operieren.
Infrarotsensoren: Nützlich in Umgebungen mit wenig Licht oder thermischem Kontrast, häufig in Verteidigungs- oder Nachtanwendungen zu finden.
Bildbasierte Sensoren (Kameras): Verwenden Monokular-, Stereo- oder RGB-D-Kameras, um Tiefenkarten und Umgebungsbilder zur Hinderniserkennung zu erstellen.
Computer-Vision-Systeme
Fortschrittliche Kollisionsvermeidungssysteme verwenden KI-Computer-Vision, um Kameradaten zu interpretieren, wodurch sie die Bewegung von Hindernissen klassifizieren und vorhersagen können. Diese Algorithmen ermöglichen es Drohnen, Szenen zu „verstehen“ und zwischen statischen und dynamischen Objekten wie Fußgängern oder Fahrzeugen zu unterscheiden.
Die bildbasierte Navigation unterstützt auch SLAM (Simultaneous Localization and Mapping), was für die Navigation in unbekannten Umgebungen von entscheidender Bedeutung ist. Diese Systeme sind besonders nützlich für UAVs, die in Gebieten ohne GPS-Empfang, in städtischen Schluchten oder in Innenräumen fliegen.
Sensorfusionssysteme
Um die Robustheit zu verbessern, integrieren viele moderne Systeme mehrere Sensoren und kombinieren LiDAR-Daten mit Kamera- oder Radardaten. Dieser Sensorfusionsansatz erhöht die Zuverlässigkeit und Genauigkeit, insbesondere in missionskritischen oder unvorhersehbaren Szenarien. Beispielsweise kann eine Drohne LiDAR für die strukturelle Kartierung und Radar zur Erkennung von Hindernissen bei widrigen Wetterbedingungen verwenden.
Komponenten eines Kollisionsvermeidungssystems
Die Entwicklung eines zuverlässigen Kollisionsvermeidungssystems erfordert eine komplexe Integration von Hardware- und Softwareelementen. Diese Komponenten arbeiten zusammen, um sicherzustellen, dass unbemannte Systeme sicher durch dynamische und unvorhersehbare Umgebungen navigieren können.
Sensoren
Die „Augen und Ohren” des Fahrzeugs, die Rohdaten zur Umgebung über Näherungserkennung, Wärmebildgebung oder optische Sensorik erfassen:
Redundanz- und Ausfallsicherungsmechanismen sind häufig in kritischen Anwendungen integriert, um im Falle eines Komponentenausfalls die kontinuierliche Funktion sicherzustellen und die Zuverlässigkeit des Kollisionsvermeidungssystems in missionskritischen Szenarien zu erhöhen.
Kollisionsvermeidung in verschiedenen unbemannten Plattformen
Während die Grundprinzipien gleich bleiben, variiert die Umsetzung der Kollisionsvermeidung je nach Plattformtyp erheblich:
Luftfahrtsysteme (UAVs)
Drohnen und UAVs nutzen eine Kombination aus Bildverarbeitungssystemen, LiDAR und Radar, um Kollisionen in der Luft zu vermeiden, was besonders wichtig ist bei Operationen außerhalb der Sichtweite (Beyond Visual Line of Sight, BVLOS), bei denen Drohnen und Hindernisse vermieden werden müssen. Drohnen zur Hindernisvermeidung sind für die Paketzustellung, die Infrastrukturinspektion und das Sprühen in der Landwirtschaft von entscheidender Bedeutung, da sie häufig in der Nähe von Menschen oder Gebäuden eingesetzt werden.
Bodensysteme (UGVs)
UGVs nutzen Näherungssensoren und Echtzeit-Kartierung, um sich in Lagerhäusern, Fabriken oder unebenem Gelände zu orientieren. Sie müssen sowohl mit statischen Objekten wie Paletten als auch mit dynamischen Hindernissen wie Arbeitern oder Fahrzeugen zurechtkommen. Sichere Navigationssysteme für UGVs legen Wert auf eine Hinderniserkennung mit geringer Latenz und eine reibungslose Routenplanung, um eine sichere Navigation zu gewährleisten.
Oberflächen- und Seesysteme (USVs/UUVs)
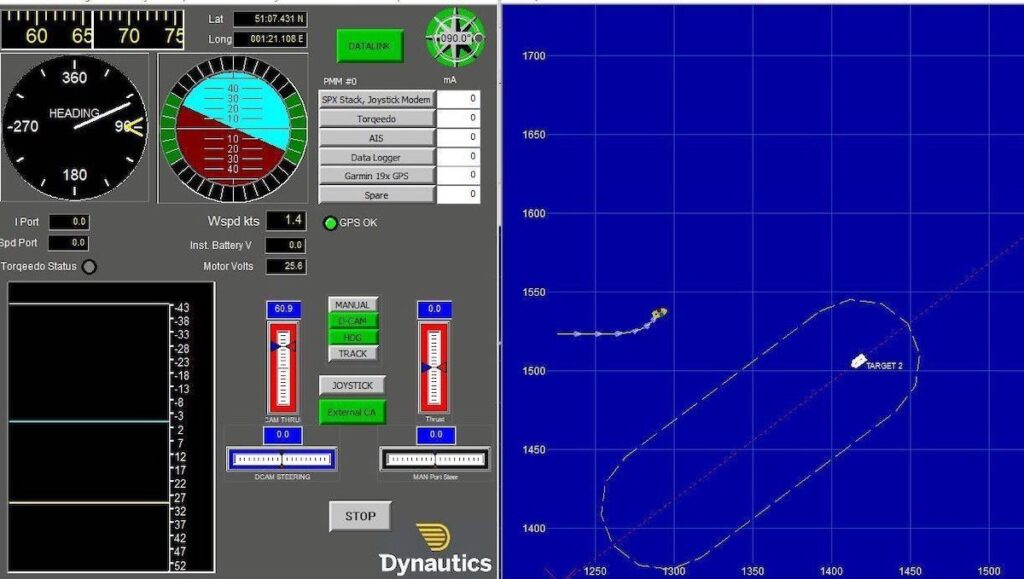
Autonome Wasserfahrzeuge sind häufig auf Radar, Sonar und COLREG-basierte Algorithmen angewiesen, um sicher auf Wasserstraßen zu navigieren. Diese Systeme bewerten das Verhalten anderer Schiffe, befolgen internationale Kollisionsverhütungsregeln und weichen Bojen, Docks und Wildtieren aus.
Anwendungen der Kollisionsvermeidungstechnologie
Kommerzielle Nutzung
Einzelhandels-, Logistik- und E-Commerce-Unternehmen setzen UAVs und UGVs mit Hinderniserkennungssystemen ein, um die Lieferung und die interne Logistik zu automatisieren. Drohnen mit Kollisionsvermeidung reduzieren das Risiko in städtischen Umgebungen und ermöglichen die Lieferung auf der letzten Meile, ohne Fußgänger oder Eigentum zu gefährden.
Industrielle Nutzung
In Lagerhäusern und Fabriken tragen Kollisionsvermeidungssysteme auf autonomen mobilen Robotern (AMRs) zur Optimierung des Materialtransports und der Lagerbewegungen bei. Auf Baustellen manövrieren robuste UGVs mit LiDAR-Hindernisvermeidung sicher durch sich ständig verändernde Landschaften.
Militärische Nutzung
Im Verteidigungsbereich spielt die Kollisionsvermeidung sowohl bei autonomen als auch bei halbautonomen Plattformen eine entscheidende Rolle. Von ISR-Drohnen (Intelligence, Surveillance, Reconnaissance) bis hin zu unbemannten Bodenfahrzeugen ermöglichen diese Systeme den Einheiten einen unabhängigen Einsatz in umkämpften oder GPS-gestörten Umgebungen. Vision-basierte Navigations- und DAA-Systeme tragen dazu bei, die Integrität der Mission auch unter Bedingungen der elektronischen Kriegsführung aufrechtzuerhalten.
Beziehung zu Detect-and-Avoid-Systemen
Obwohl sie eng miteinander verwandt sind, Erkennungs- und Ausweichsysteme (DAA) speziell dafür entwickelt, um die regulatorischen und betrieblichen Anforderungen für unbemannte Flugzeuge zu erfüllen, die in gemeinsam genutzten Lufträumen fliegen, insbesondere bei BVLOS-Operationen. DAA-Systeme verfügen über eine größere Reichweite und sind häufig mit anderen Flugverkehrsmanagementsystemen koordiniert.
Kollisionsvermeidungssysteme hingegen sind für die Hindernisvermeidung im Nah- bis Mittelbereich konzipiert und werden in allen unbemannten Bereichen eingesetzt.
Weiterentwicklung der Kollisionsvermeidung
Kollisionsvermeidung ermöglicht Drohnen, Robotern und autonomen Schiffen einen sichereren, präziseren und unabhängigeren Betrieb. Durch die Integration einer Vielzahl von Sensoren, von LiDAR und Radar bis hin zu Bildverarbeitungssystemen, und deren Kombination mit fortschrittlicher Software und KI können heutige unbemannte Plattformen Hindernisse zuverlässig erkennen und umfliegen.
Mit der Weiterentwicklung unbemannter Systeme wird auch die Komplexität ihrer Kollisionsvermeidungssysteme zunehmen, sodass sie in dynamischen Umgebungen zunehmend vollständig autonom agieren können. Ob zur Unterstützung autonomer Drohnenlieferungen, der Lagerlogistik oder der Verteidigungsüberwachung – die Kollisionsvermeidung wird auch weiterhin eine zentrale Rolle für das Wachstum und die Sicherheit unbemannter Operationen spielen.