



In February 2023, members from the Gippsland Squadron of the Australian Volunteer Coast Guard (AVCG) conducted a demonstration of OceanAlpha’s Dolphin 1 Remote-controlled Life-saving buoy on the Gippsland lakes in eastern Victoria, Australia.
The Dolphin 1 water rescue device users a powerful water-jet thruster to reach a maximum speed of 3.3m/s, faster than any human swimmers, to provide rapid responses to drowning incidents.
After years of serving emergency rescue forces worldwide, more and more potential capabilities of Dolphin 1 Remote-controlled Buoy have been discovered and applied to practice.
As in the case of the Gippsland Squadron, Dolphin 1 is expected to be used for towing mooring rope in shallow water areas besides water rescue.
The Gippsland Squadron is responsible for patrolling the waters of the Gippsland Lakes, a network of lakes and lagoons in eastern Victoria. Covering an area of approximately 354 square kilometers (137 square miles), the lakes are a popular destination for boaters, anglers, and other recreational activities.
These lakes are relatively shallow overall, with an average depth of around 2-3 meters (6-10 feet) or even shallower. It can present challenges for boaters, particularly those with larger vessels or boats with deep drafts. When a vessel goes aground, the Gippsland Squadron may use a mooring rope to secure the boat to a nearby structure for engine repair or tow the vessel to safety.
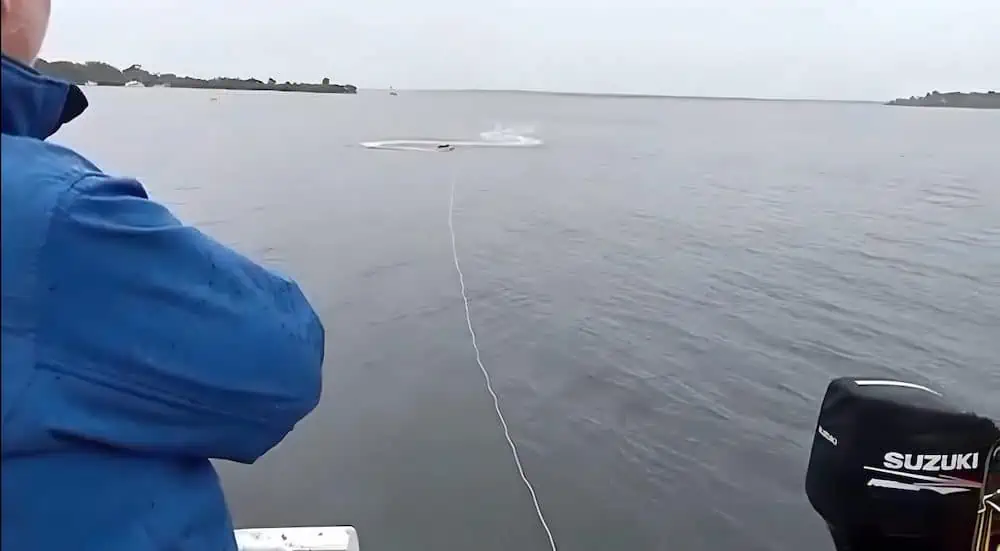
At the demonstration, Gippsland Squadron tested the Dolphin 1’s towing capability for sending a 10mm small mooring rope and a 20mm larger one in the shallow water area. The ropes of two different types vary in weight, which poses different challenges to the buoyancy and propulsion of the buoy. According to the Gippsland Squadron, Dolphin 1 gave a satisfying performance in both testing sections.
The introduction of the Dolphin 1 Remote-controlled Buoy is expected to make the mooring setup dramatically more accessible and more efficient. The Dolphin 1 can drag the mooring ropes in different sizes to reach the trapped vessel, and the volunteers can remotely control it by the lake or on the rescue vessel.




















